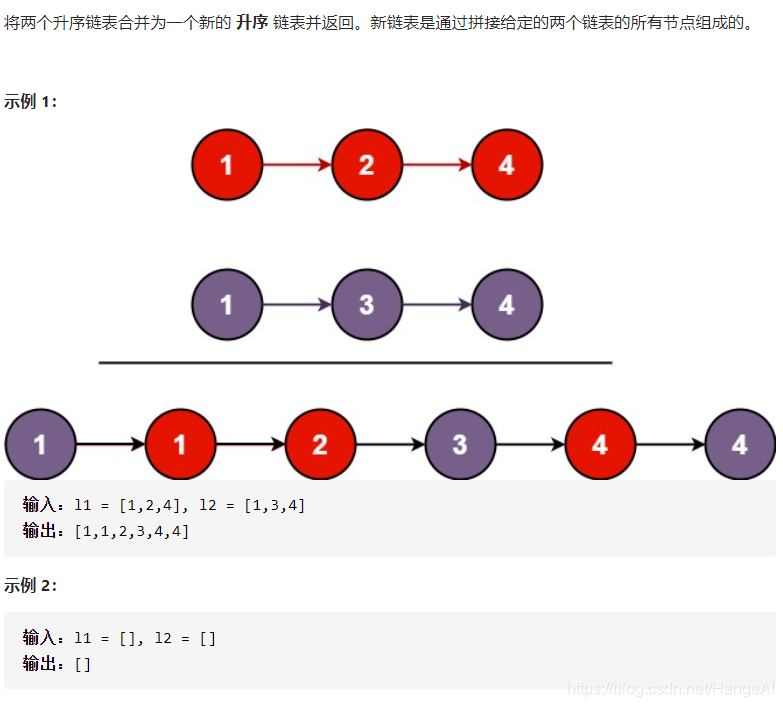
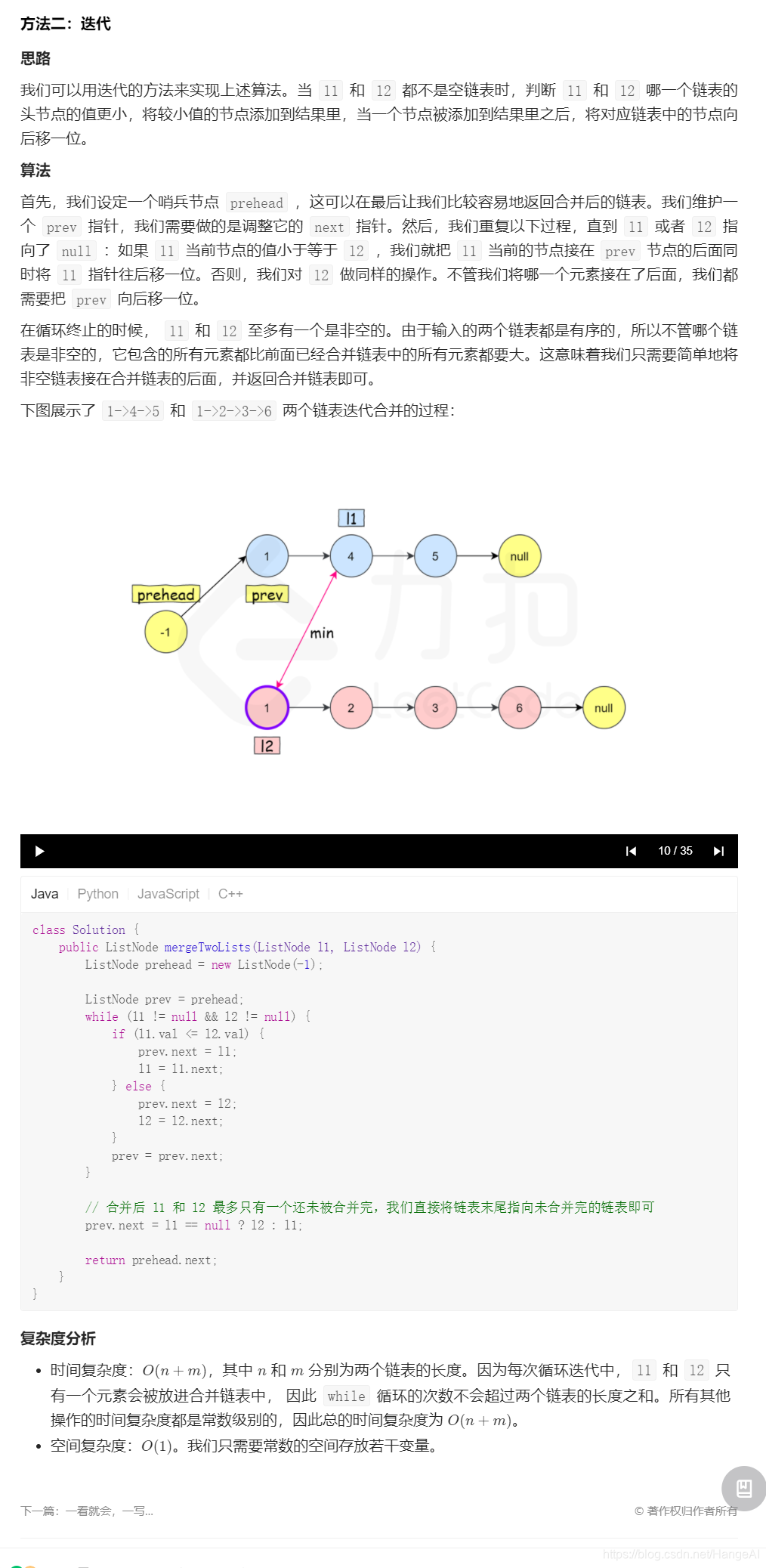
记录:LeetCode 21.合并两个有序链表
 Python转C++/Java:有序链表合并的Python与C++/Java实现对比
Python转C++/Java:有序链表合并的Python与C++/Java实现对比
最新推荐文章于 2025-08-22 18:56:05 发布




 本文博主分享了在看到面试常用C++/Java后,如何用Python解决有序链表合并问题的过程,展示了从Python思路到官方C++/Java解决方案的转换。通过实例解析了链表比较和合并的算法,并附带官方解释。
Python转C++/Java:有序链表合并的Python与C++/Java实现对比
本文博主分享了在看到面试常用C++/Java后,如何用Python解决有序链表合并问题的过程,展示了从Python思路到官方C++/Java解决方案的转换。通过实例解析了链表比较和合并的算法,并附带官方解释。
本文博主分享了在看到面试常用C++/Java后,如何用Python解决有序链表合并问题的过程,展示了从Python思路到官方C++/Java解决方案的转换。通过实例解析了链表比较和合并的算法,并附带官方解释。
Python转C++/Java:有序链表合并的Python与C++/Java实现对比
本文博主分享了在看到面试常用C++/Java后,如何用Python解决有序链表合并问题的过程,展示了从Python思路到官方C++/Java解决方案的转换。通过实例解析了链表比较和合并的算法,并附带官方解释。
 985
552
985
552

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言