




 本文介绍了如何使用Open3D库进行几何形状的布尔运算,包括并集、交集、减集,以及利用clip_plane和compute_convex_hull功能对点云进行操作,提供了代码实例.
本文介绍了如何使用Open3D库进行几何形状的布尔运算,包括并集、交集、减集,以及利用clip_plane和compute_convex_hull功能对点云进行操作,提供了代码实例.
open3d 的布尔运算还是挺好用的,这边我把可用代码直接贴出来
首先解释一下布尔运算的原理
1.布尔运算的基本原理和算法
常见的三种布尔运算:并集,交集,减集。其实这三种布尔运算的前面运算逻辑是一样的,最后一步不同。
1.并集就是把两个物体合并成一个物体
2.交集是求两个物体公共的部分
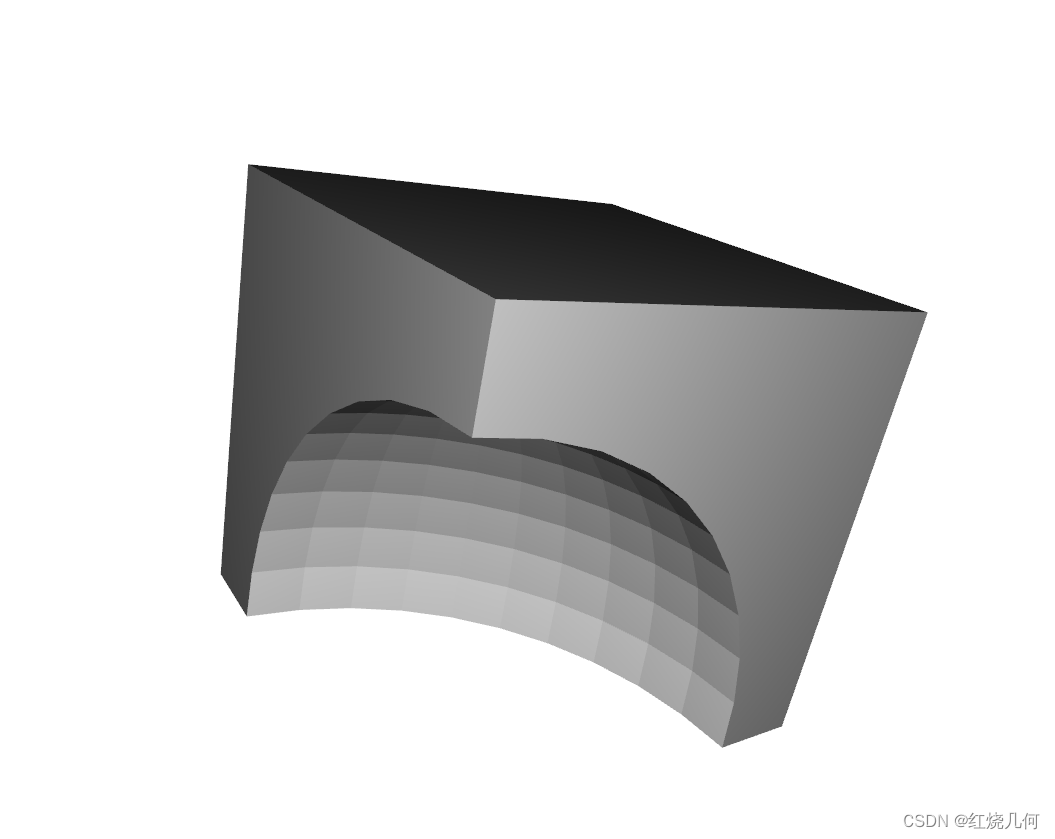
3.减集是从一个物体中减去两个物体公共的部分
下列代码可以直接运行:
import open3d as o3d
if __name__ == "__main__":
# 【加载点云】
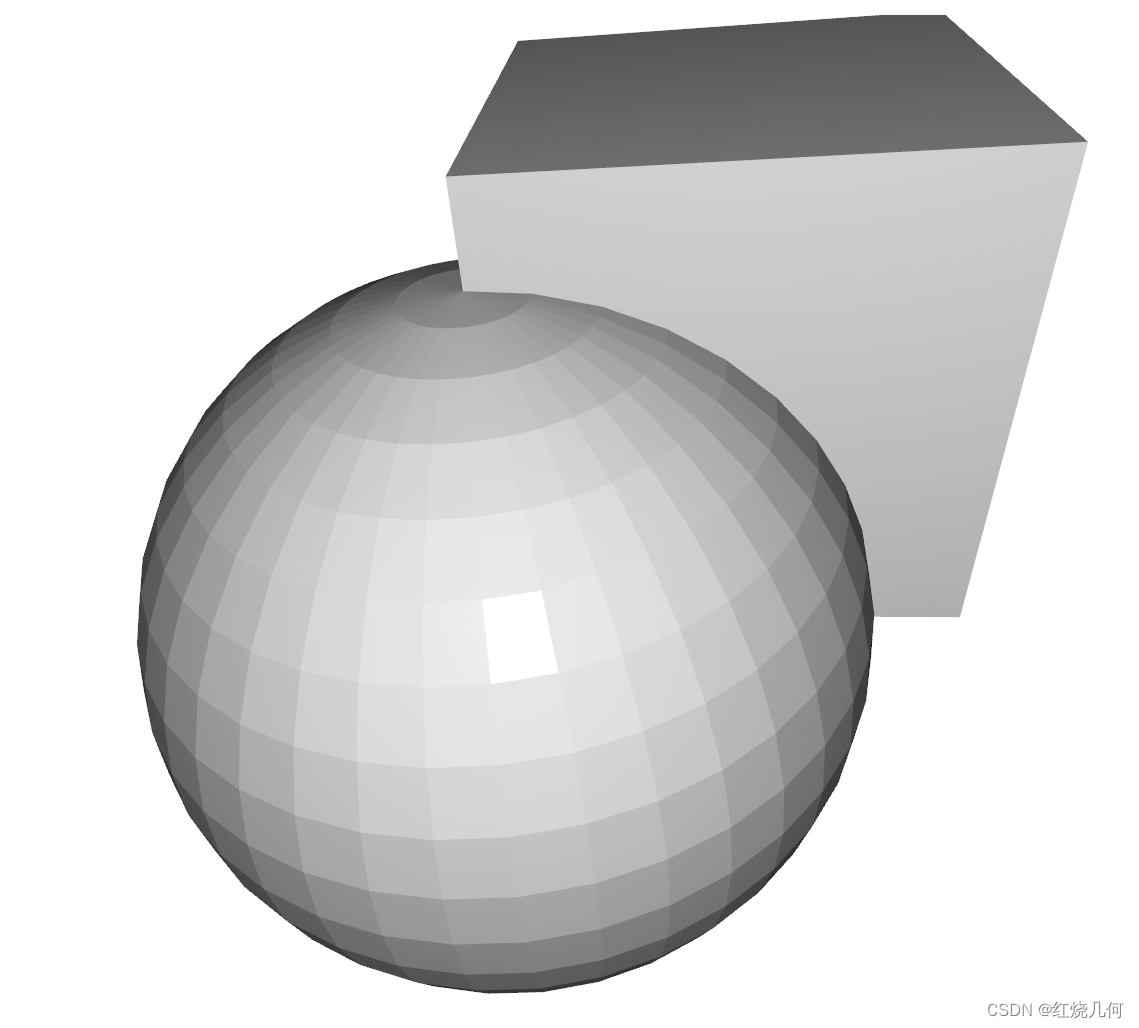
box = o3d.geometry.TriangleMesh.create_box()
box = o3d.t.geometry.TriangleMesh.from_legacy(box)
sphere = o3d.geometry.TriangleMesh.create_sphere(0.8)
sphere = o3d.t.geometry.TriangleMesh.from_legacy(sphere)
# 相交
intersection = box.boolean_intersection(sphere)
intersection.compute_triangle_normals()
intersection.compute_vertex_normals()
o3d.visualization.draw_geometries([intersection.to_legacy()])
# 求差
difference = box.boolean_difference(sphere)
difference.compute_triangle_normals()
difference.compute_vertex_normals()
o3d.visualization.draw_geometries([difference.to_legacy()])
# 合并
union = box.boolean_union(sphere)
union.compute_triangle_normals()
union.compute_vertex_normals()
o3d.visualization.draw_geometries([union.to_legacy()])
# 剪切平面
sphere = o3d.t.geometry.TriangleMesh.from_legacy(o3d.geometry.TriangleMesh.create_sphere())
hemisphere = sphere.clip_plane(point=[0, 0, 0], normal=[1, 0, 0])
hemisphere.compute_triangle_normals()
hemisphere.compute_vertex_normals()
o3d.visualization.draw_geometries([hemisphere.to_legacy()])
# 凸包
mesh = o3d.t.geometry.TriangleMesh.from_legacy(union.to_legacy())
hull = mesh.compute_convex_hull()
mesh.compute_triangle_normals()
mesh.compute_vertex_normals()
o3d.visualization.draw_geometries([hull.to_legacy()])

















 3891
3891





 到【灌水乐园】发言
到【灌水乐园】发言







