



一、整体概述
设备用于薄片型产品全自动激光切割与打标,操作人员将产品放置于上料平台并按下 启动按钮后,GS软件实时响应指令,控制精密滑台轴将产品精准输送至激光切割与打标工位,并触发激光器出光完成复杂图形的高速切割或打标,完成后自动回到放料位,支持连续批量作业。
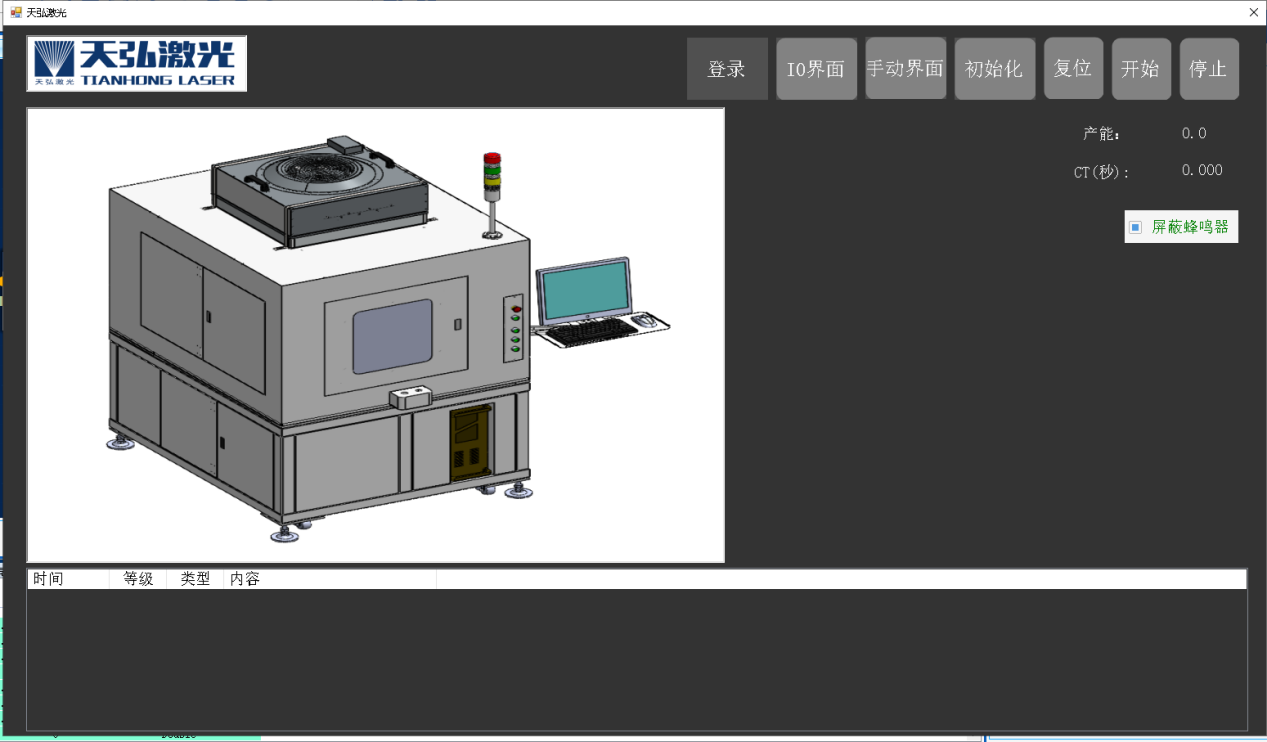
设备图片:
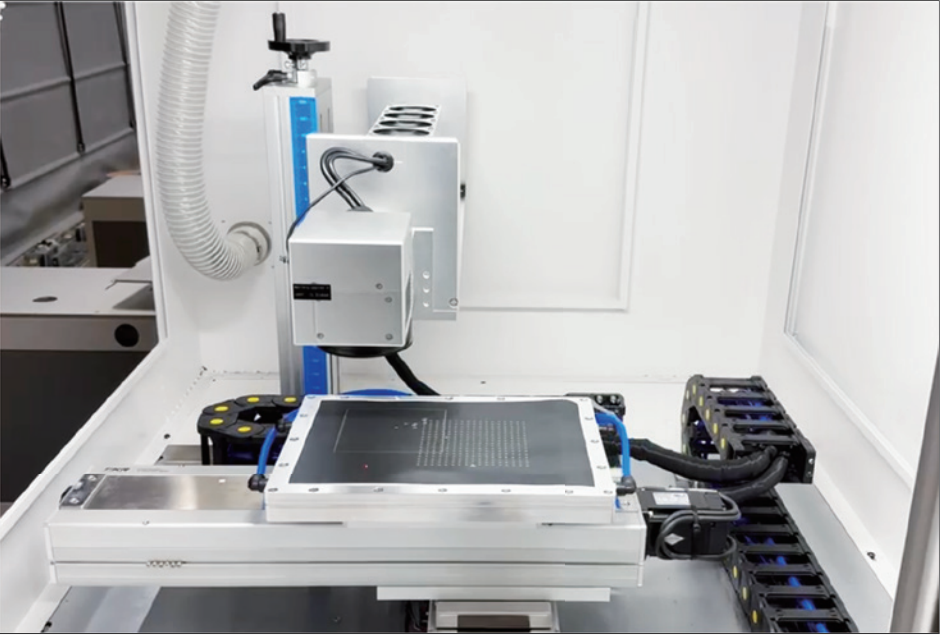
设备硬件:
板卡:乐创4轴脉冲卡
打标卡:金橙子二代卡
二、 流程搭建前准备工作
1.设备动作逻辑流程图
根据客户工艺绘制逻辑流程图,具体流程图在说明流程时展示
2.制作GS电气 IO表
第一次使用GS软件时操作步骤如下:
(1)运行GS软件;
(2)打开资源管理器界面;
(3)在算子库板卡模版找到IO配置算子;
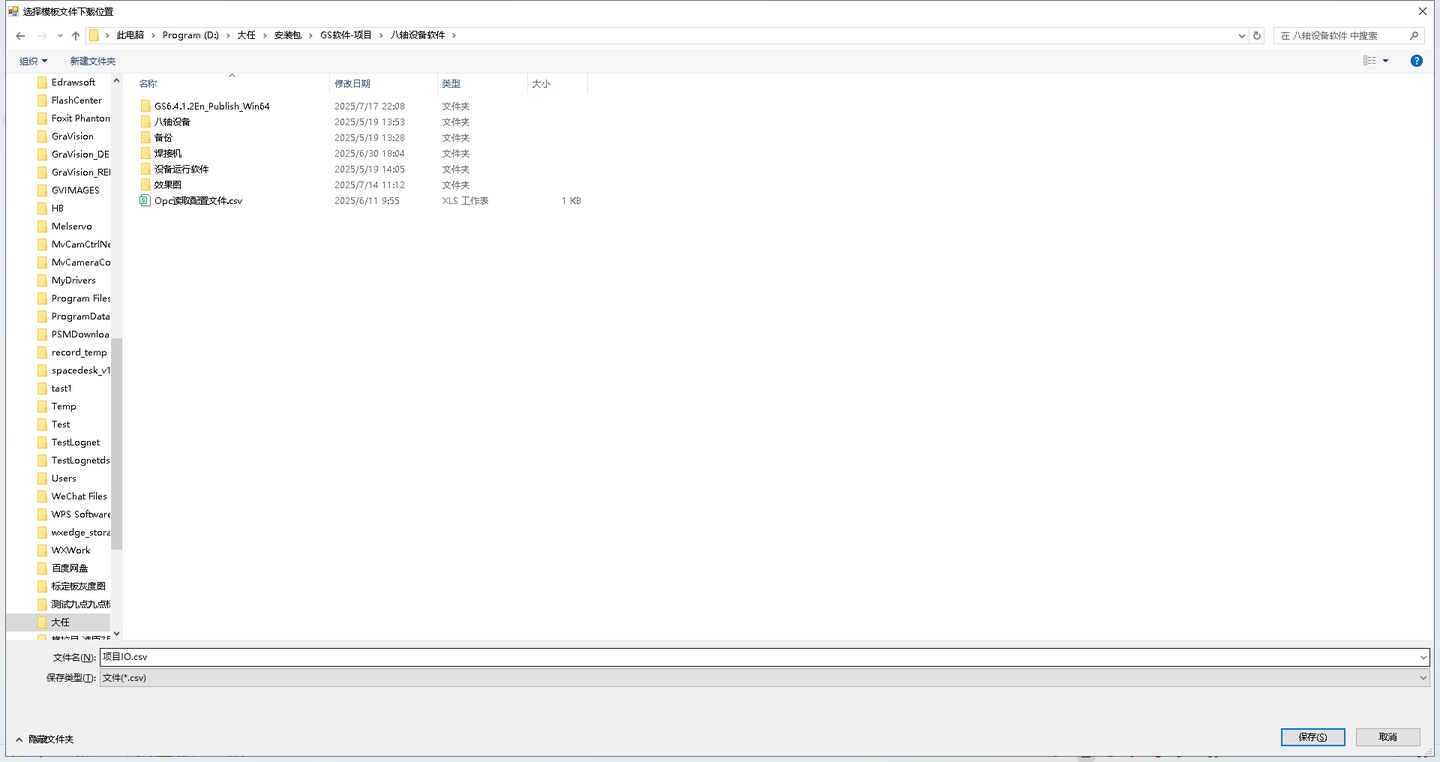
(4)打开配置界面会给出默认文件,下载模版文件另存为一份,点击保存
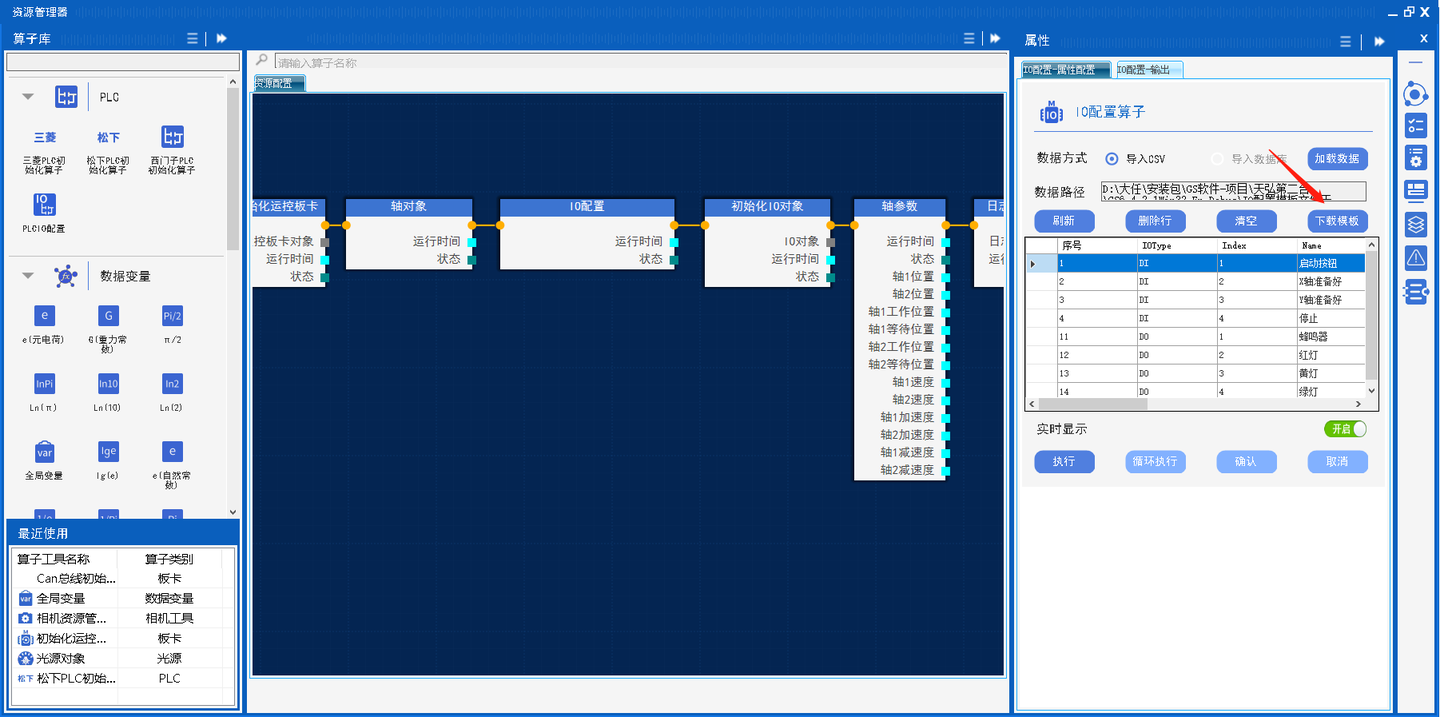
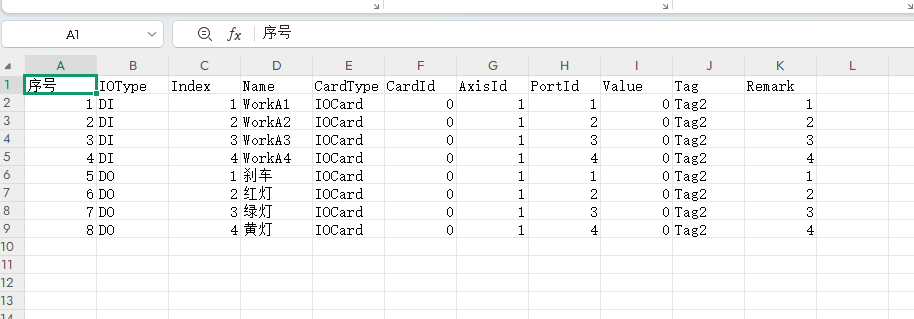
(5)打开存储的路径文件,根据实际进行修改,IOType列填写DI或者DO,表示输入和输出,Name列表示名称,CardType列表示IO类型,CardId列表示卡号,PortId列表示IO点位所在端口号,value列表示默认点位值,Tag列表示缺省值,Remark列表示点位备注
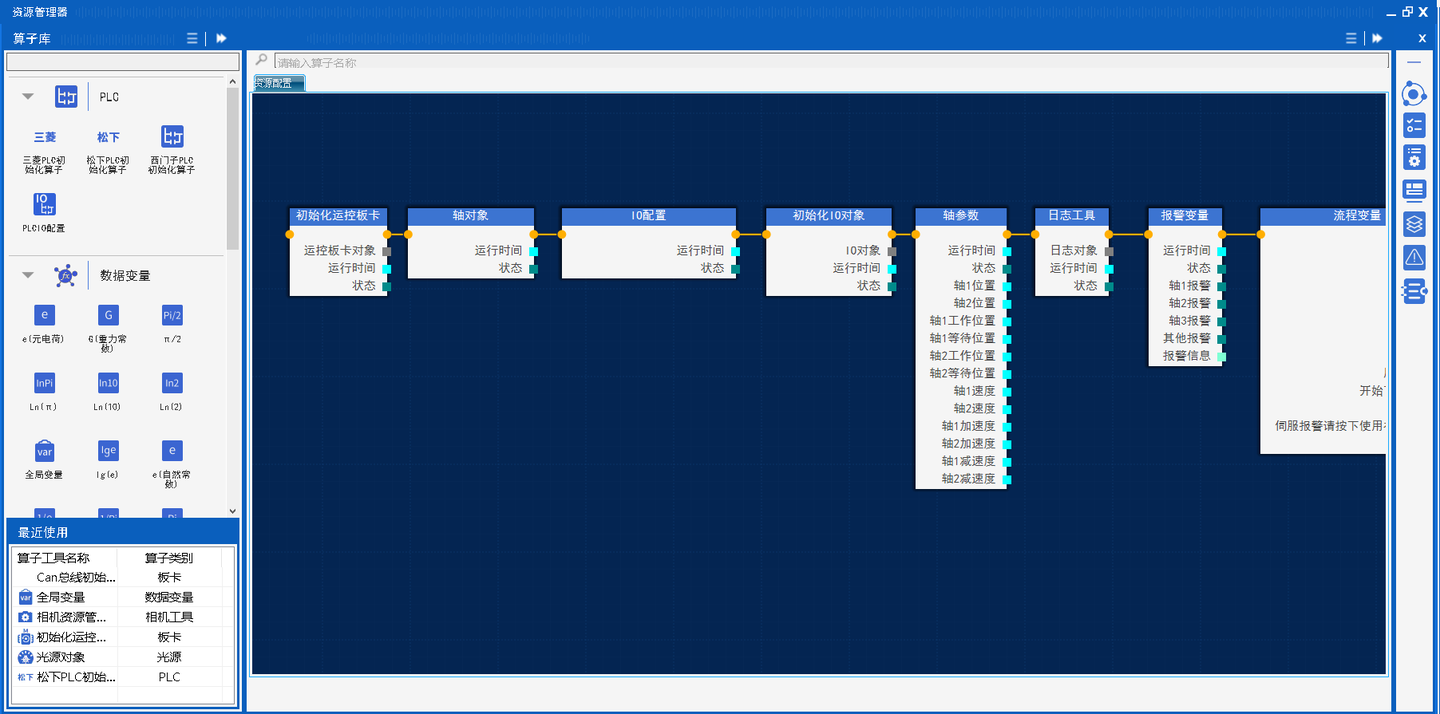
3.流程搭建
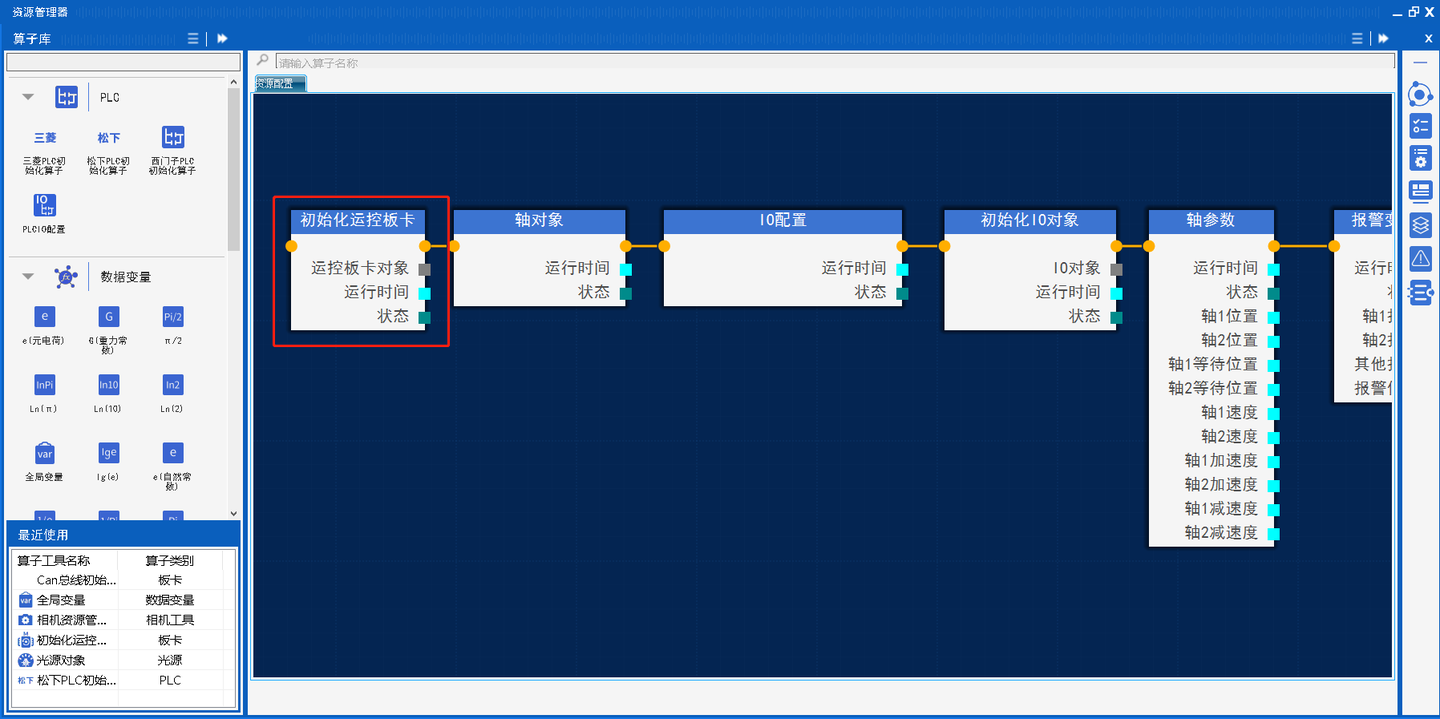
(1)资源管理器:
第一步:配置板卡资源,通过初始化运控板卡算子实现板卡连接以及配置轴初始化参数。
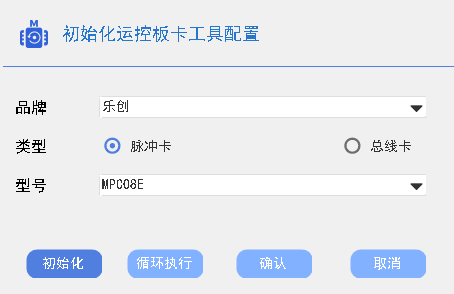
设备使用乐创MPC08E脉冲卡,“初始化运控板卡”算子配置界面上“品牌”项下拉列表选择“乐创”,类型项选择“脉冲卡”,“型号”下拉列表选择MPC08E。本项目使用的是4轴卡,只使用一张运动控制板卡,卡号设置为“0”。如存在多个板卡,可配置板卡卡号。
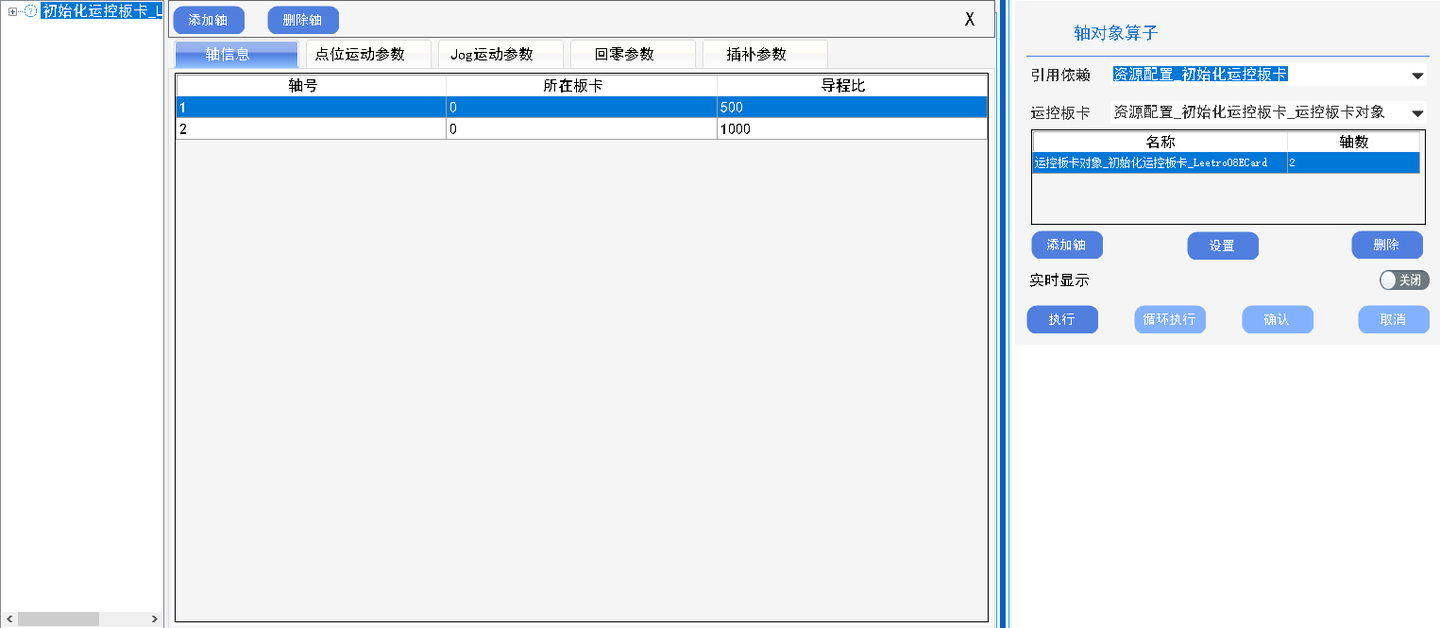
设备GS控制两个轴,通过轴对象算子添加2个轴使用,配置导程比
第二步:配置IO资源,通过IO配置和初始化IO对象算子实现IO资源初始化
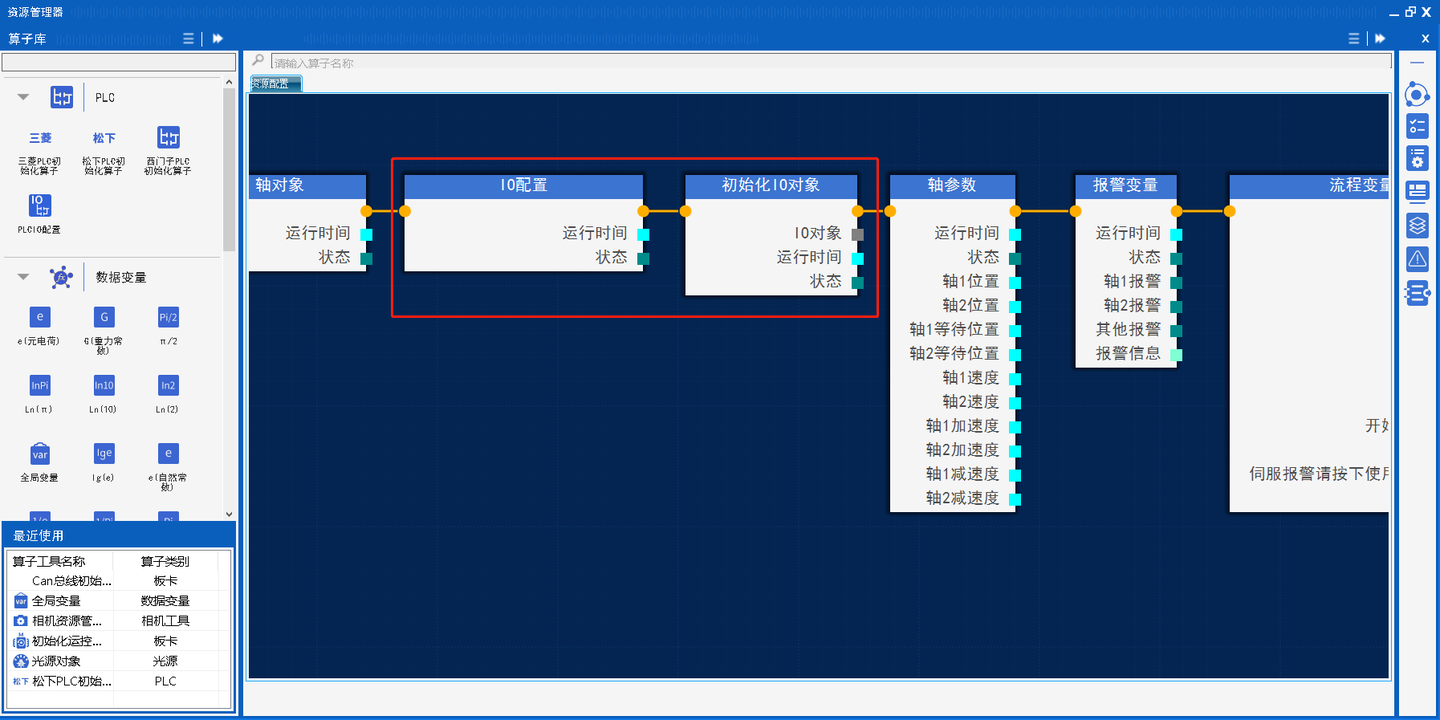
通过IO配置算子导入配置过的IO文件即完成配置IO资源,设备IO模版使用的是MPCO8E自带16路输入输出,所以初始化IO对象品牌选择“乐创”,支持类型选择“MPC08E”:
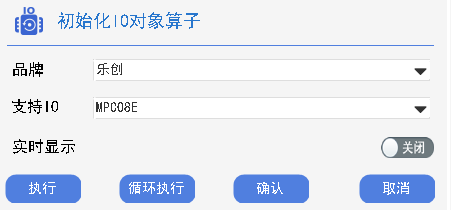
第三步:配置使用变量,将轴参数变量(包括轴速度、轴等待位置等)、界面显示信息变量(包括界面产能、配置参数存储等)、控制流程交互变量(包括设备运行状态、按钮操作逻辑判断等)、设备初始化变量(用于存储板卡是否连接异常以及轴是否伺服断电)等
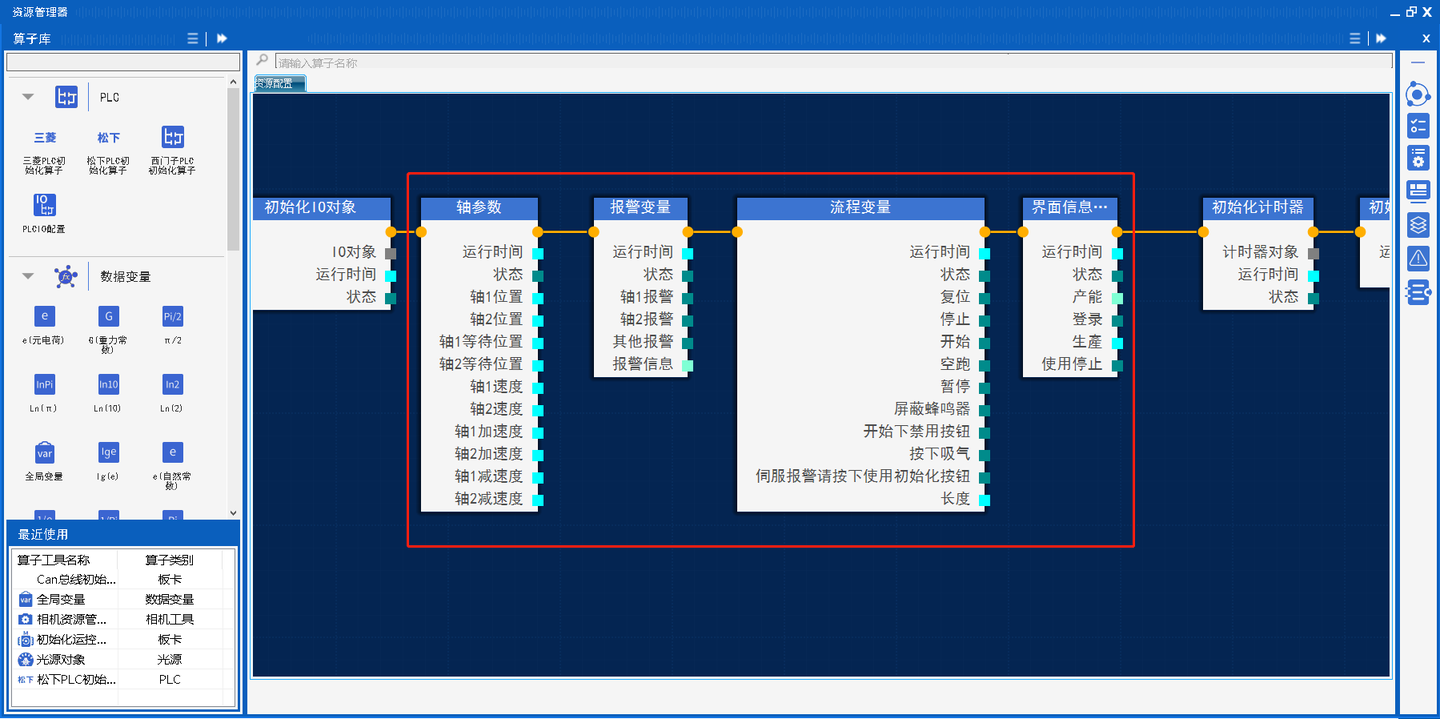
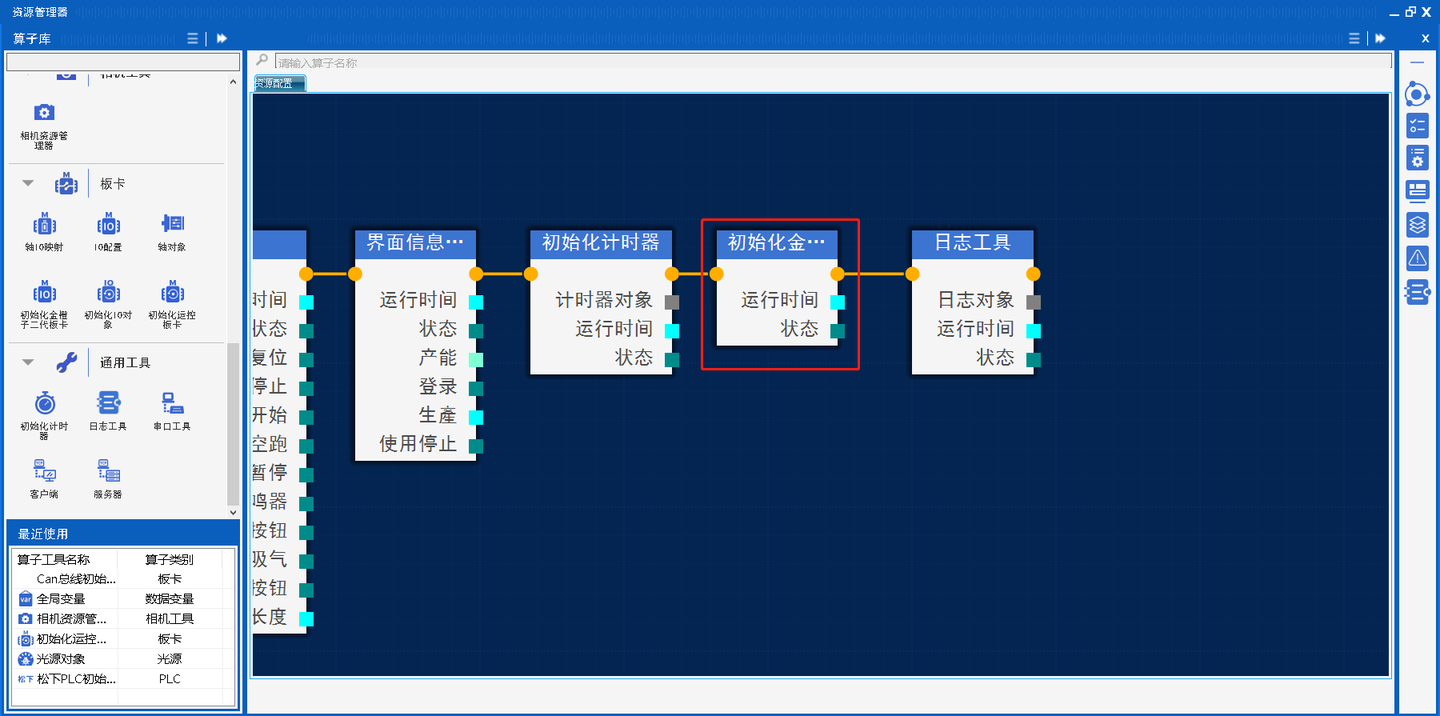
第四步:使用日志工具算子创建存储日志信息文件夹,后续和主任务设计器日志记录工具配置做运行日志存储
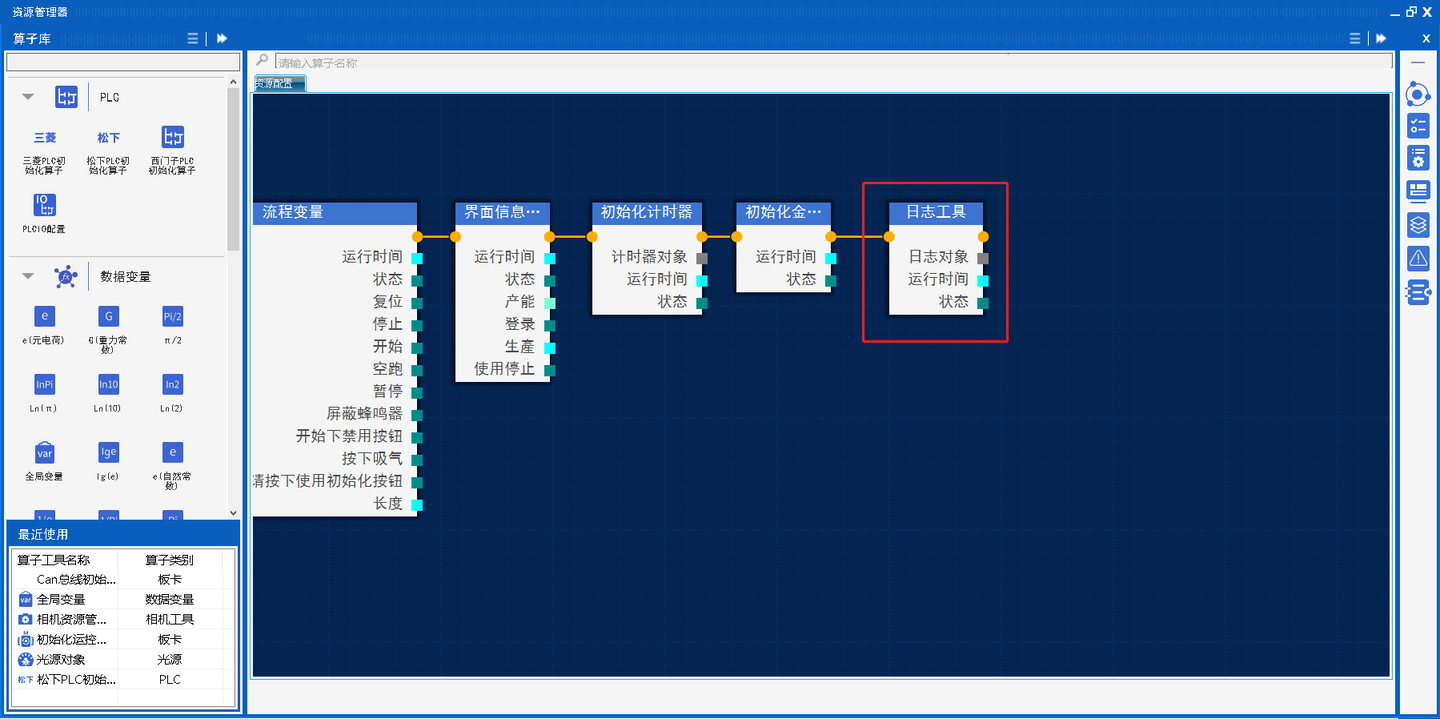
第五步:使用初始化计时器算子后续配合主任务设计器计时器开启以及计时器停止算子实现CT记录
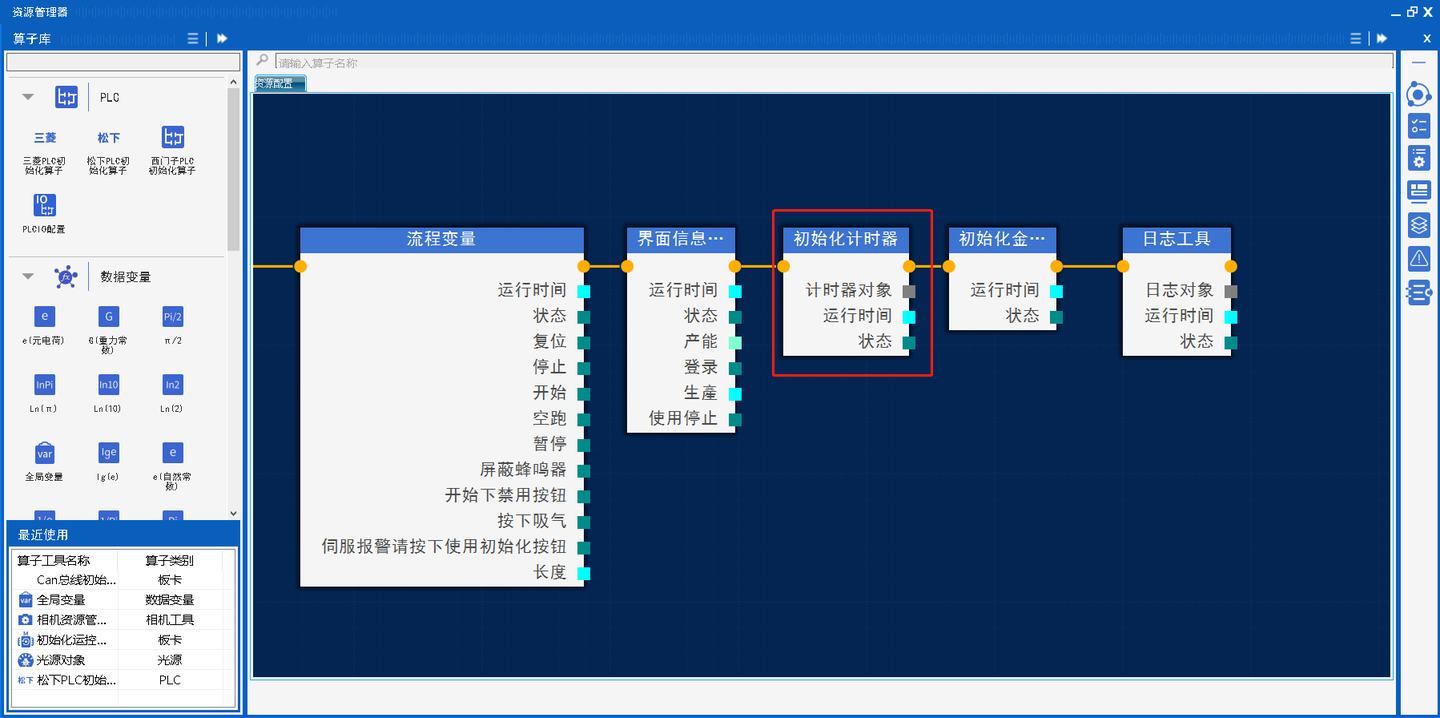
第六步:使用初始化金橙子二代卡算子连接打标卡,此算子不用做配置,执行即可
(2)任务设计器:
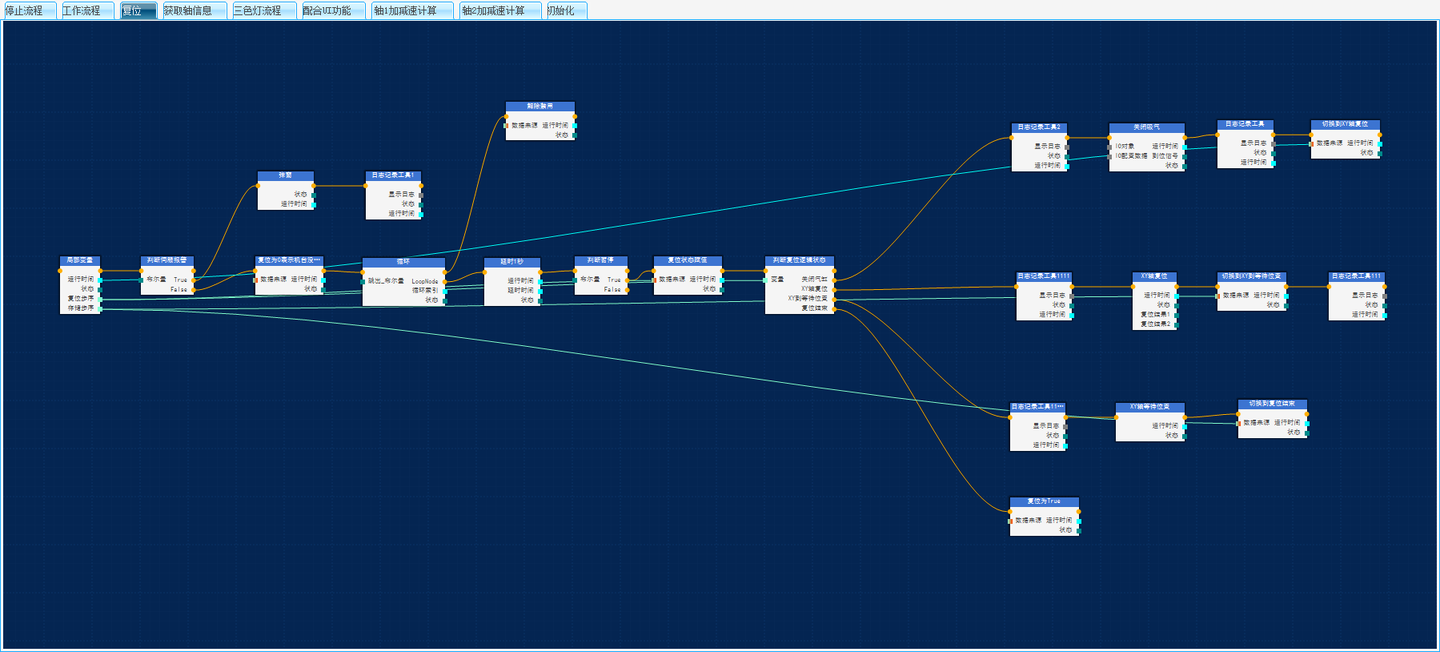
第一步:复位流程开发
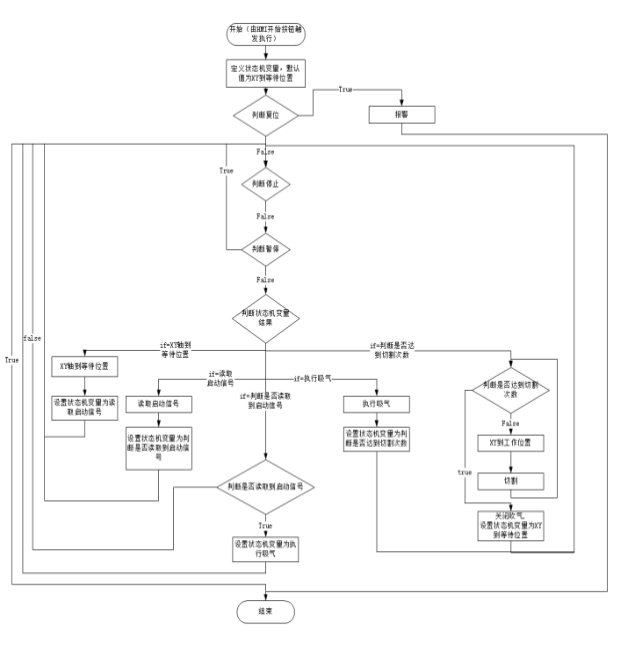
制作设备动作逻辑之前首先要实现设备复位工作,设备流程以及流程图如下:
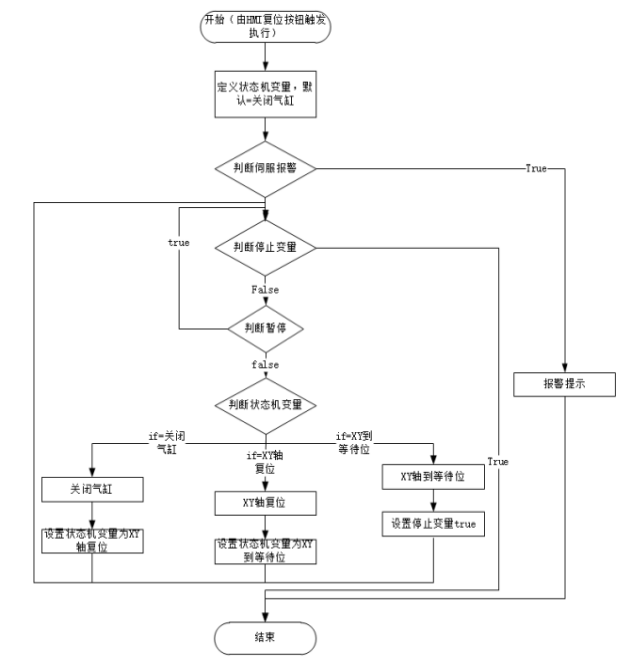
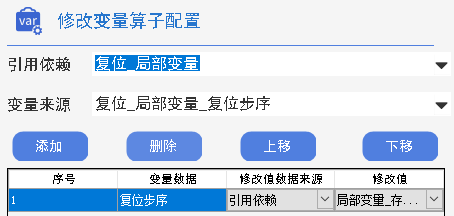
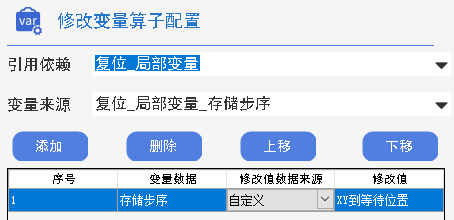
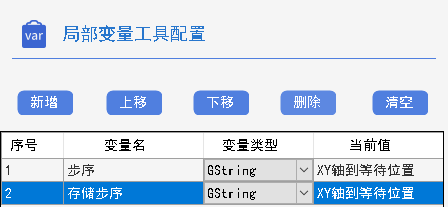
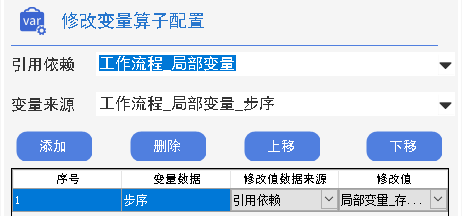
步骤1:定义状态机变量,默认=关闭气缸:通过局部变量先定义两个变量,为暂停和继续功能使用
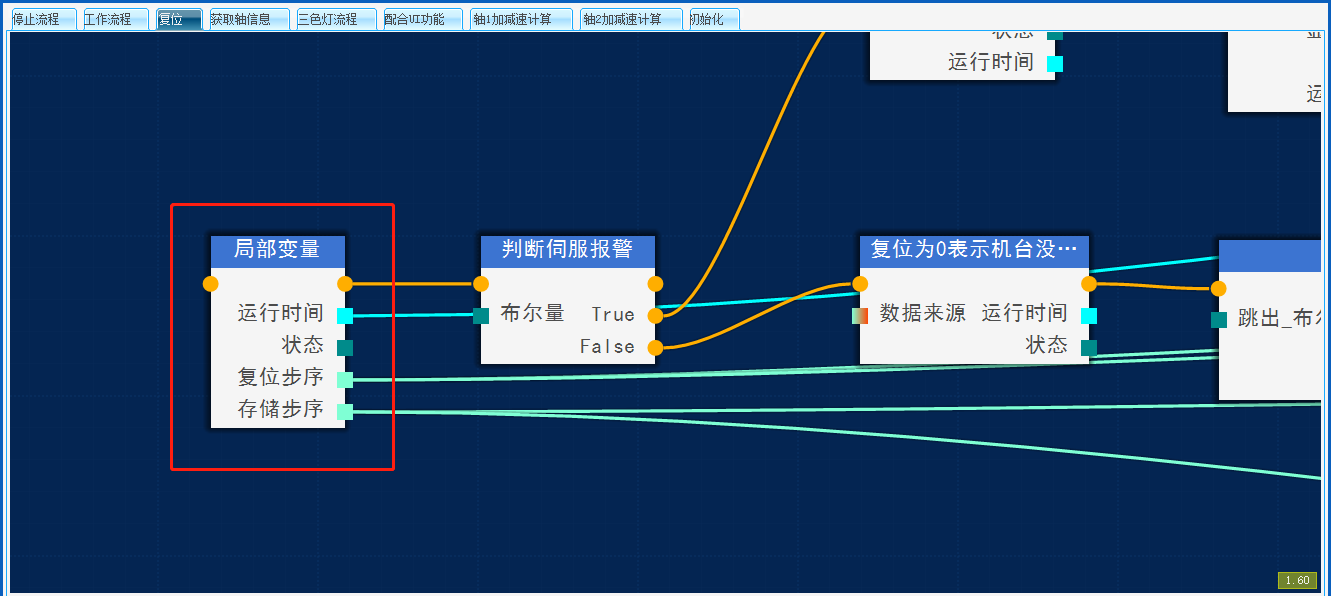
两个变量的意义是:复位步序变量用于告诉设备下一步应该做的动作,存储步序用于通知复位步序下一步可以做的动作,设备正常执行动作时通过修改存储步序变量值,例如:
当分支动作执行结束后,通过循环算子让流程重新开始循环,设备正常工作的情况下将存储步序值赋值给复位步序,再通过多分支工具判断复位步序值执行动作;
当设备按下暂停时可能会出现分支动作没运行完成的情况(例如轴未复位完成),判断设备是否暂停,暂停中将复位步序变量值到存储步序变量,那么当设备继续工作时即可继续未完成的工作,由于设备实际不需要暂停功能,因此作为预留。
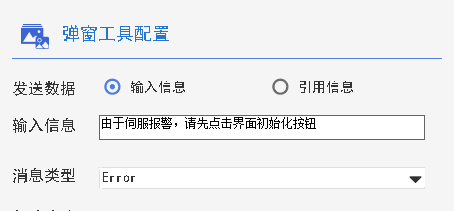
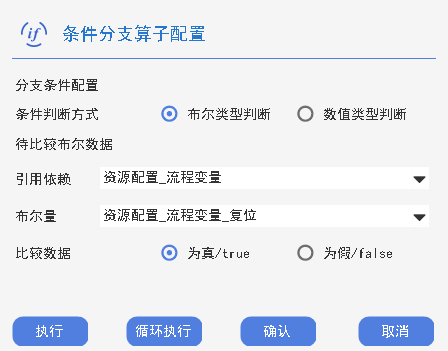
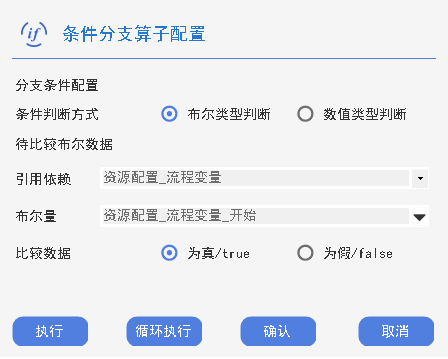
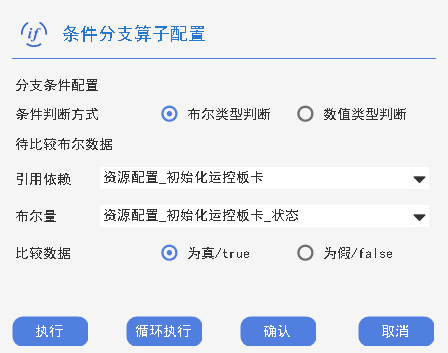
步骤2. 判断伺服报警:使用条件分支算子判断资源管理器中流程变量内的伺服报警请按下使用初始化按钮变量结果
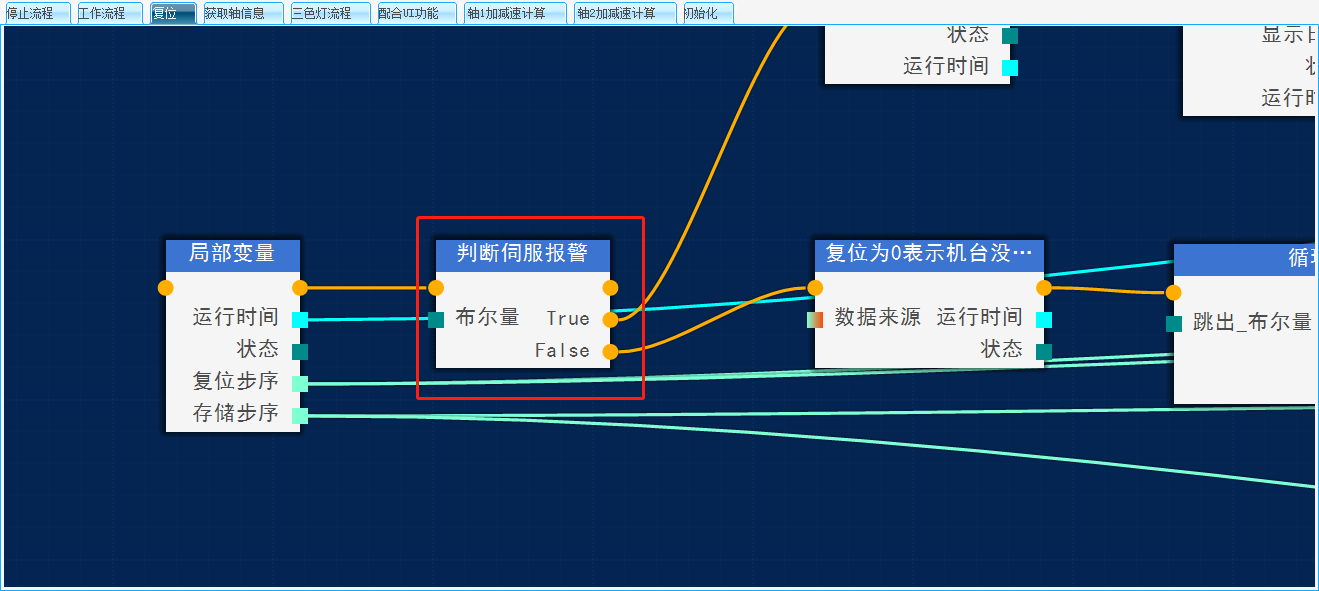
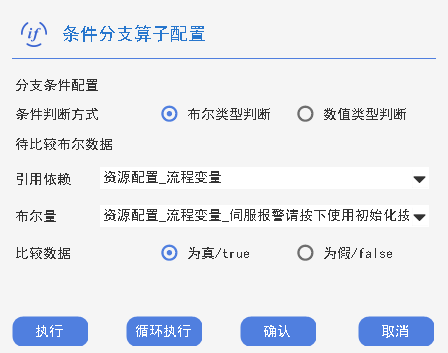
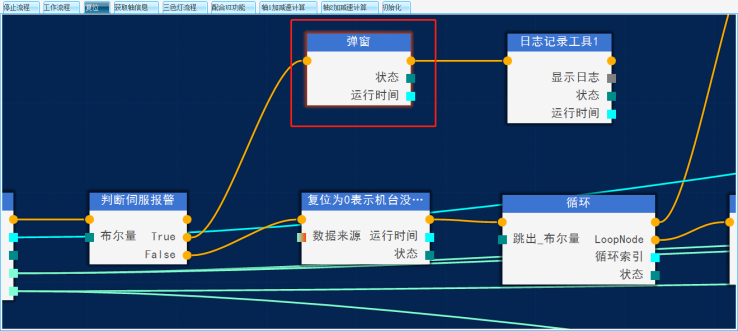
当此变量结果为true时,说明设备处于报警中,通过弹窗算子实现报警提示,此变量由获取轴信息流程反馈
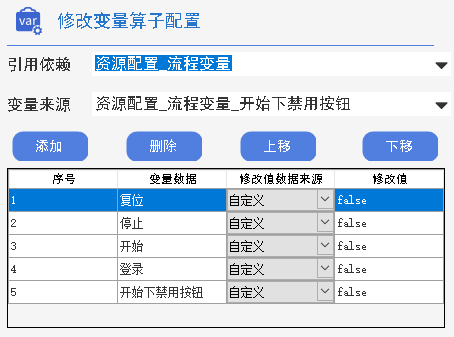
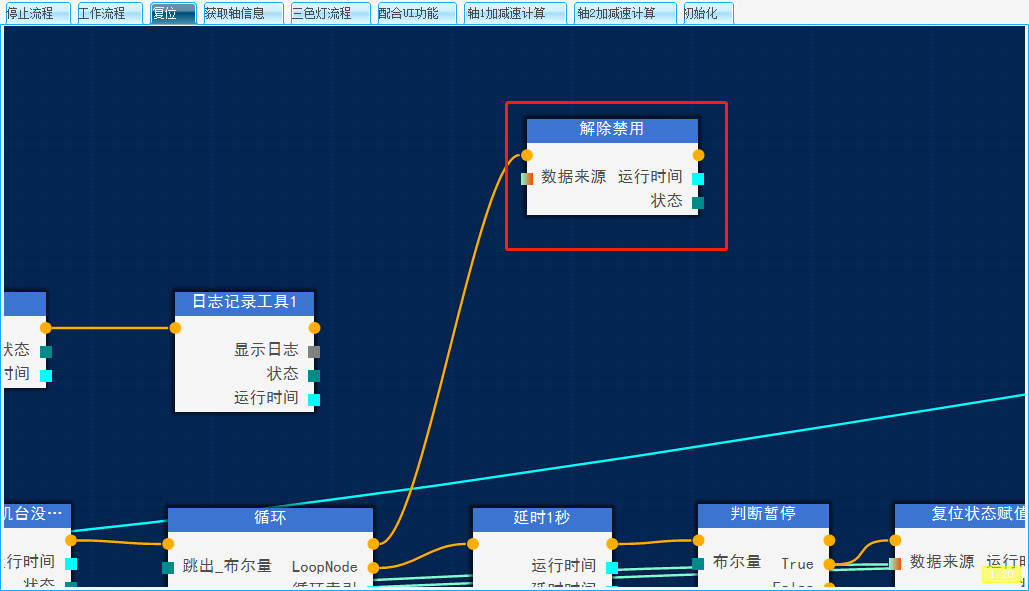
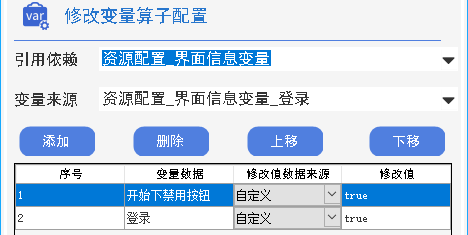
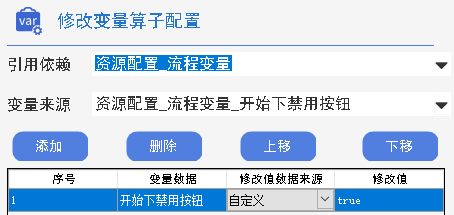
通过修改变量算子实现每次复位时的变量初始化,确保逻辑运行不会出现运行混乱,当设备复位时操作界面不可进行除停止外的其他功能,因此对资源管理器流程变量内的登录以及开始下禁用按钮两个变量赋值false,反馈给HMI控件实现功能
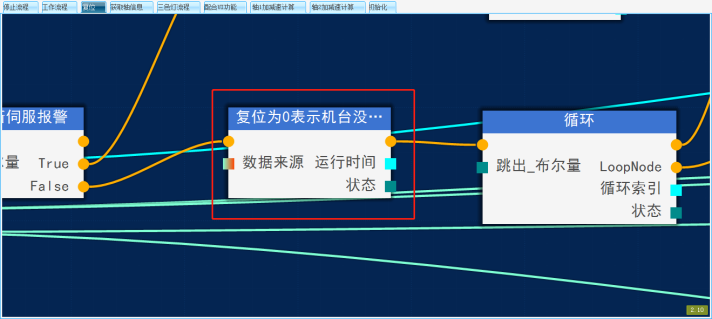
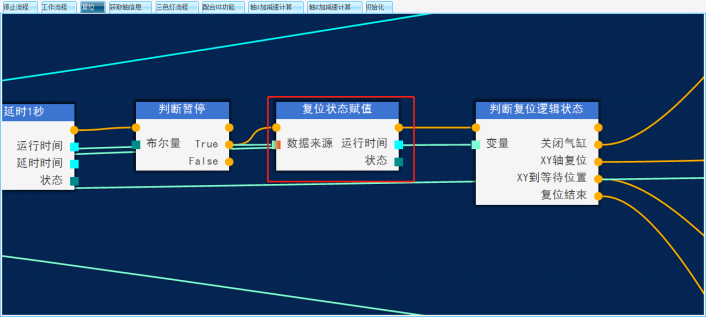
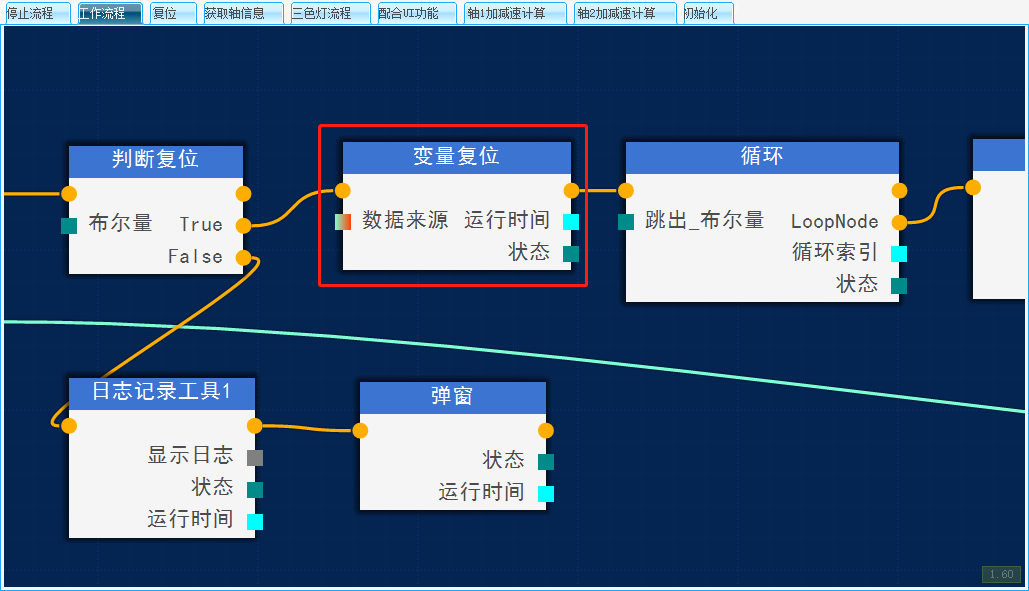
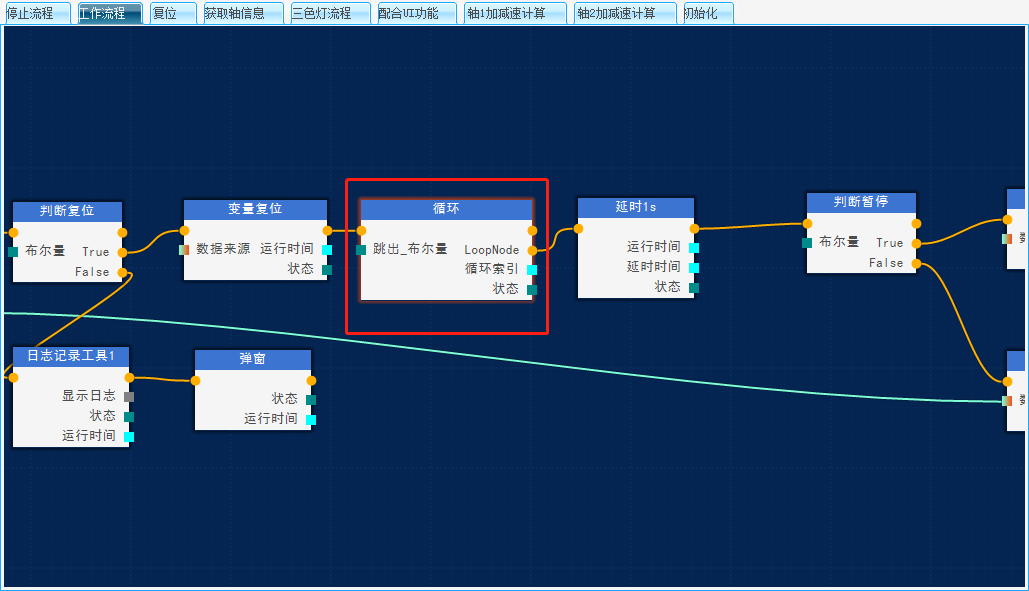
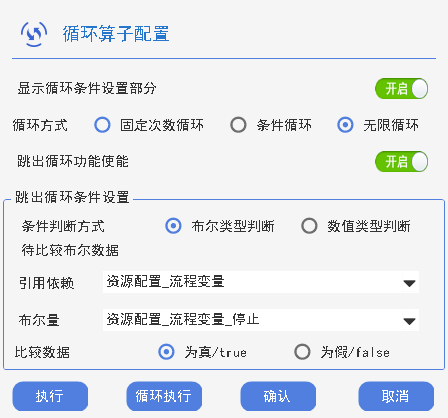
步骤3. 判断停止:实现状态机流程通过循环算子和状态多分支实现状态机模式流程搭建,循环算子配置为无限循环,控制复位流程在执行时不主动结束,让循环算子LoopNode节点后的算子处于轮询中,通过定义的停止变量控制循环是否继续运行即可,当手动点击停止按钮、设备报警以及复位动作结束时将停止变量赋值为true,循环算子达成停止条件,退出循环。
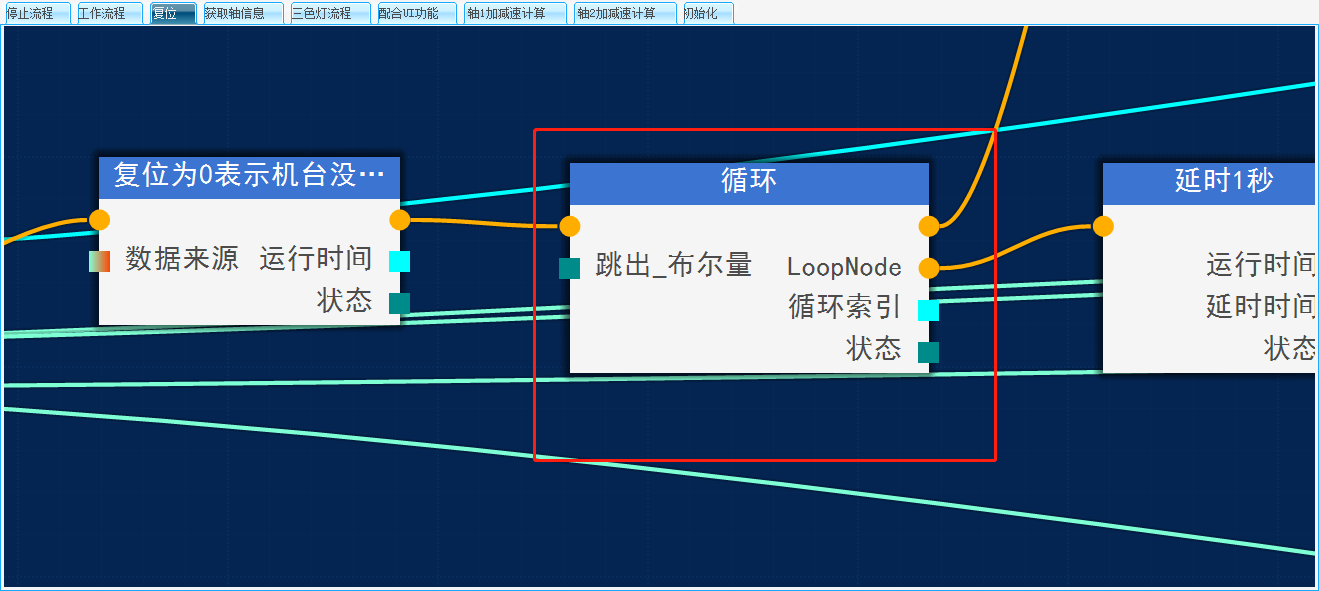
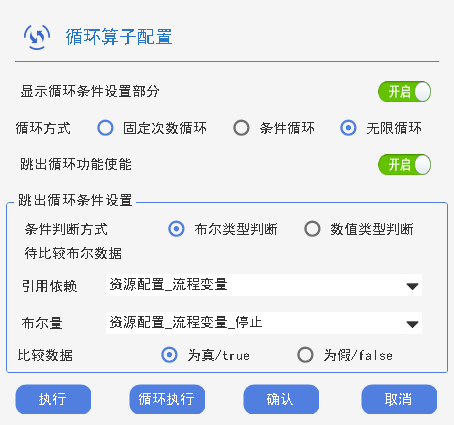
使用循环算子可增加一个延时算子,循环算子相当于编程中的while,使用时会占用大量CPU,需要通过延时算子减少占用。
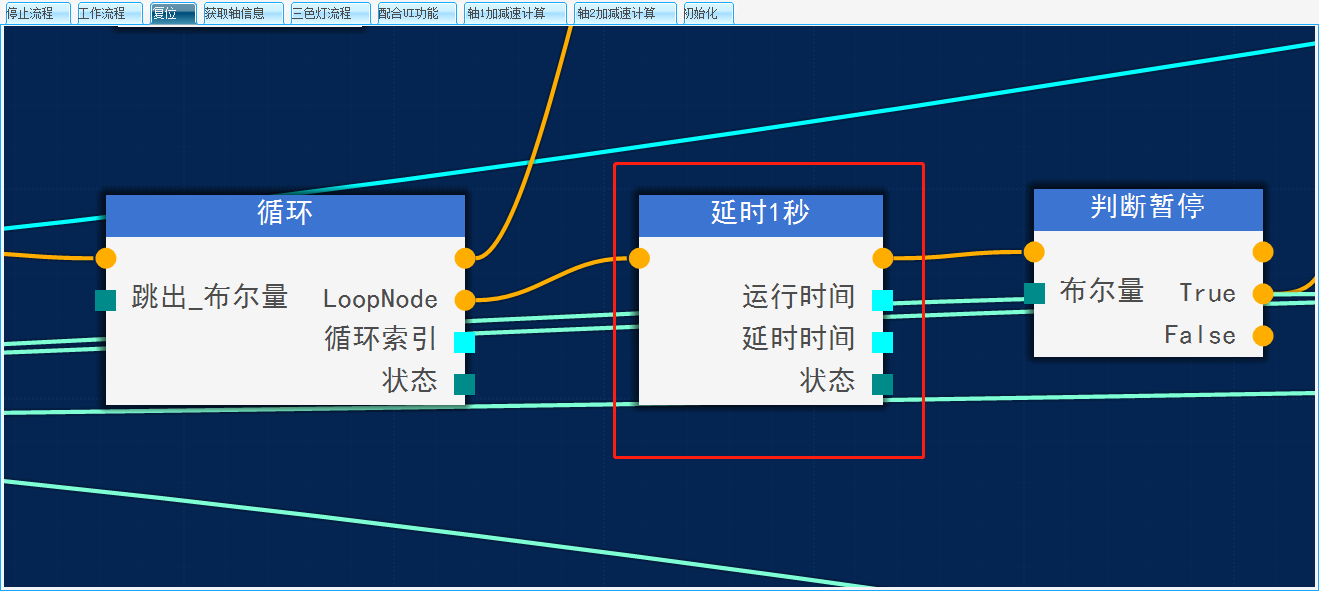
步骤4.判断暂停:设备不需要暂停功能,这里作为预留
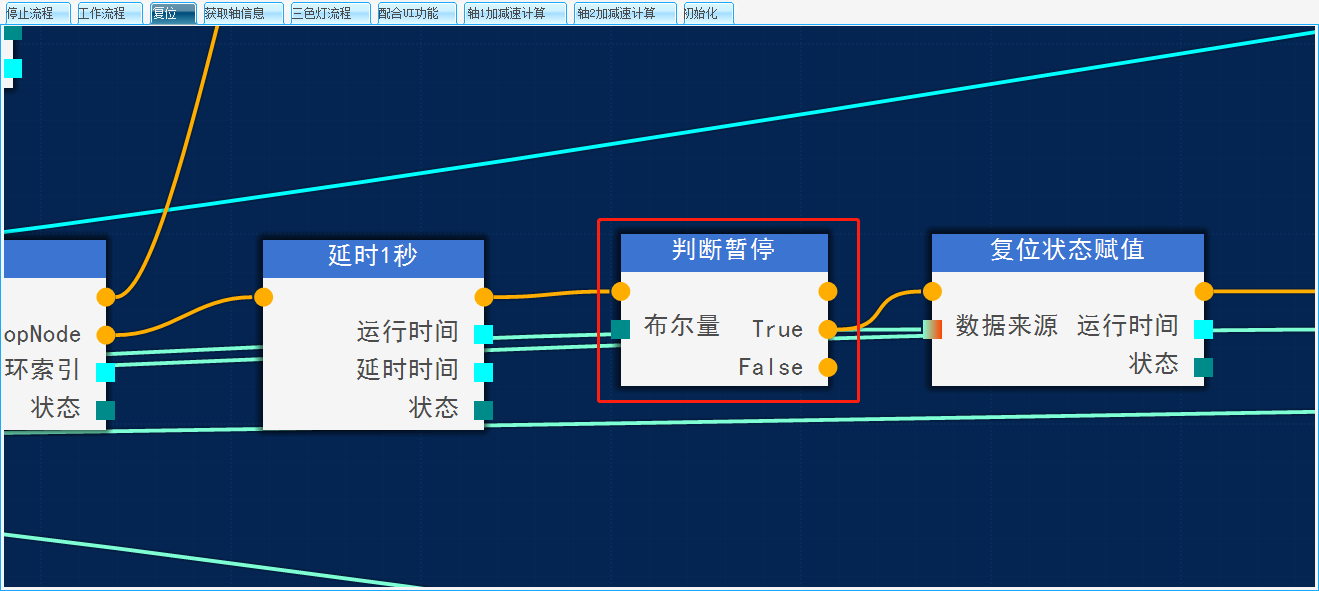
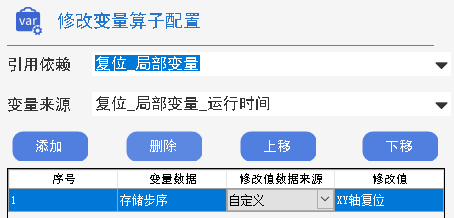
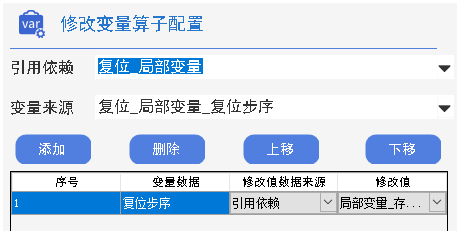
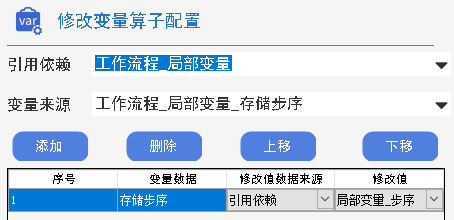
使用修改变量将定义的存储步序变量赋值给复位步序
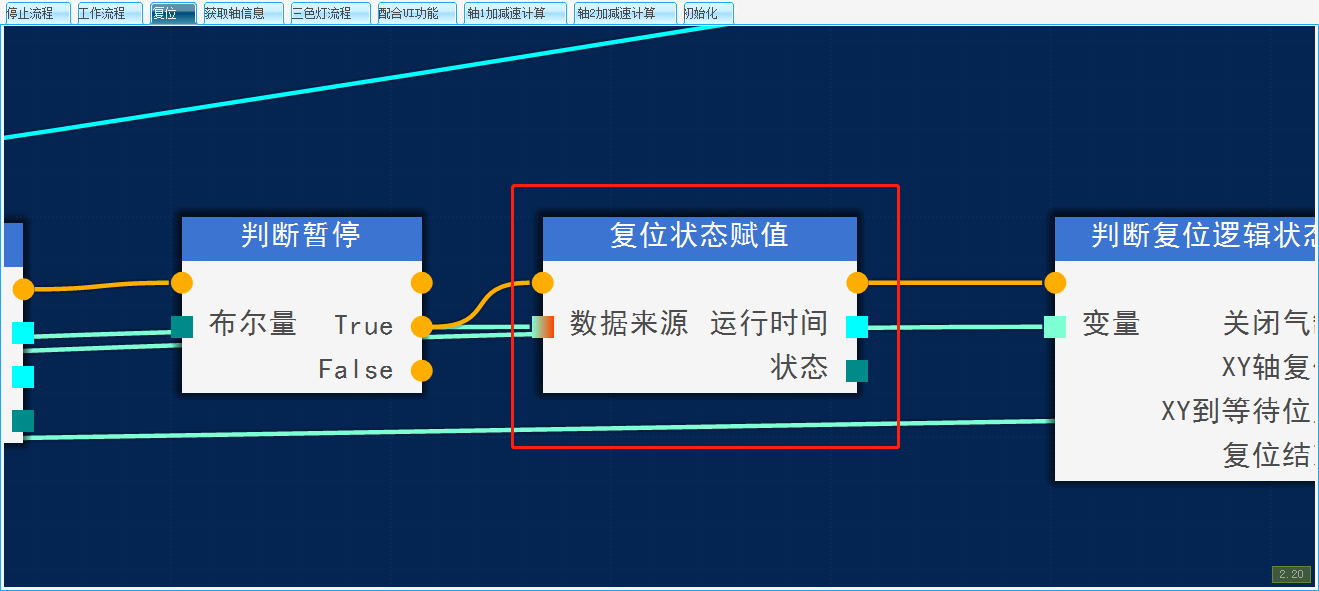
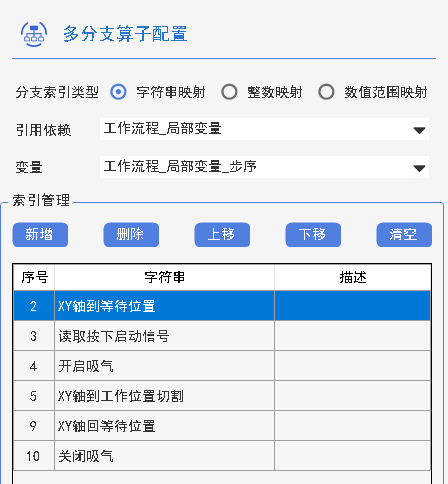
步骤5.判断状态机变量:使用多分支工具编写配置引用局部变量中的复位步序,引用定义过的局部变量复位步序,根据流程图上复位步序的具体动作过程增加复位所需要的分支步序,配置动作名称,在执行时多分支算子根据复位步序变量和增加的分支步序名称做对比,相同则执行对应分支内搭建的算子。
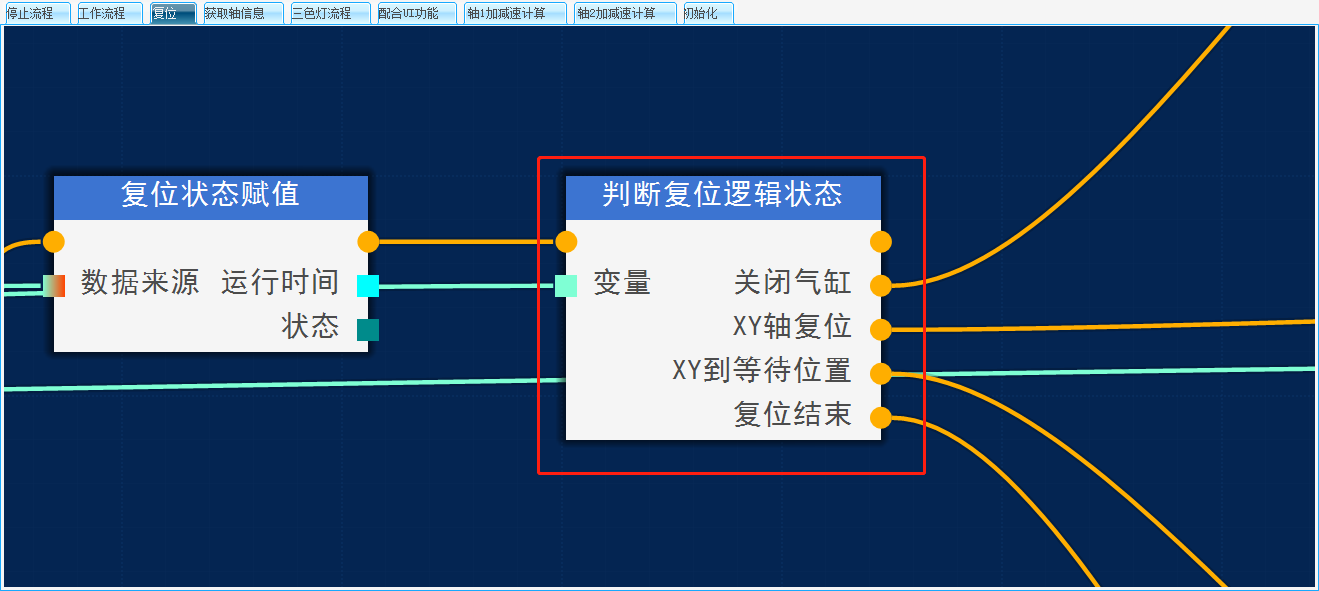

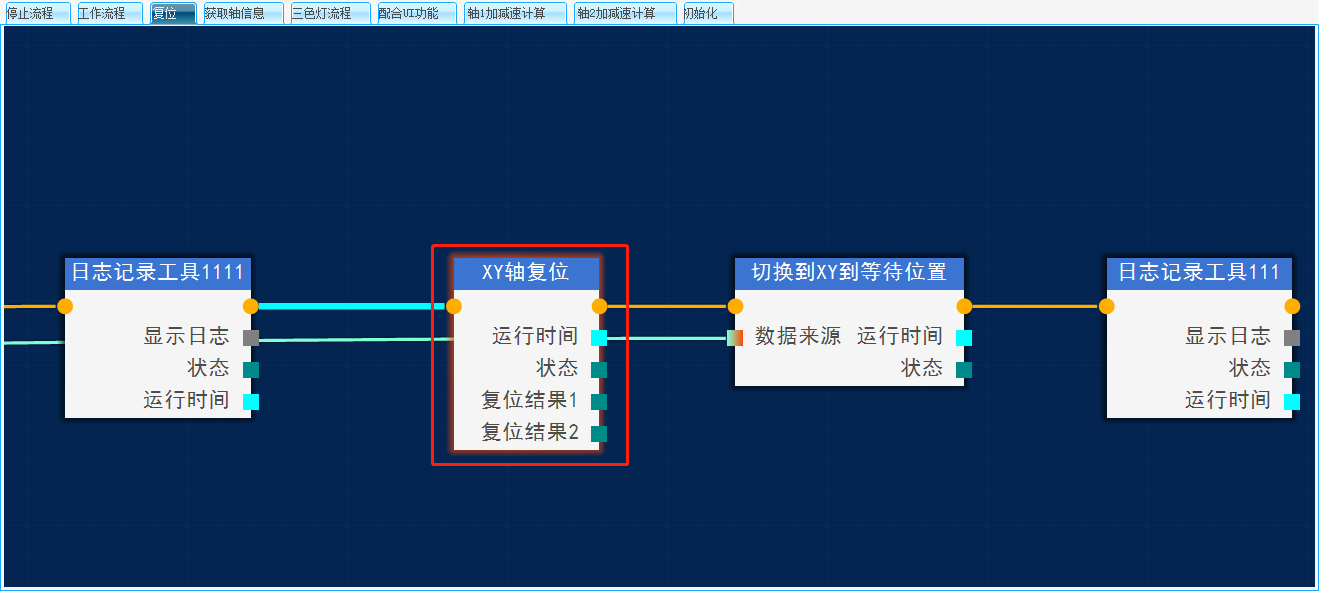
多分支下具体动作:关闭气缸-XY轴复位-XY到等待位-复位结束,根据此动作逻辑通过算子库提供的算子实现复位,并且在每个分支内都告知了设备下一步需要进行的动作,通过变量值的改变实现状态机运行模式
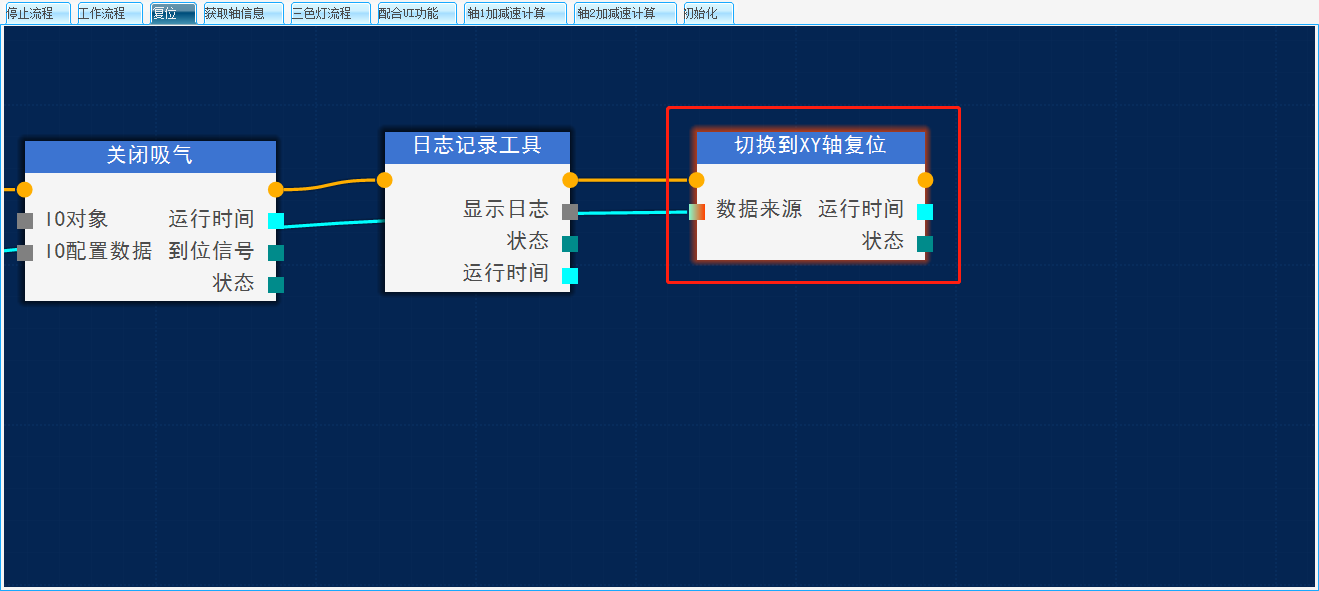
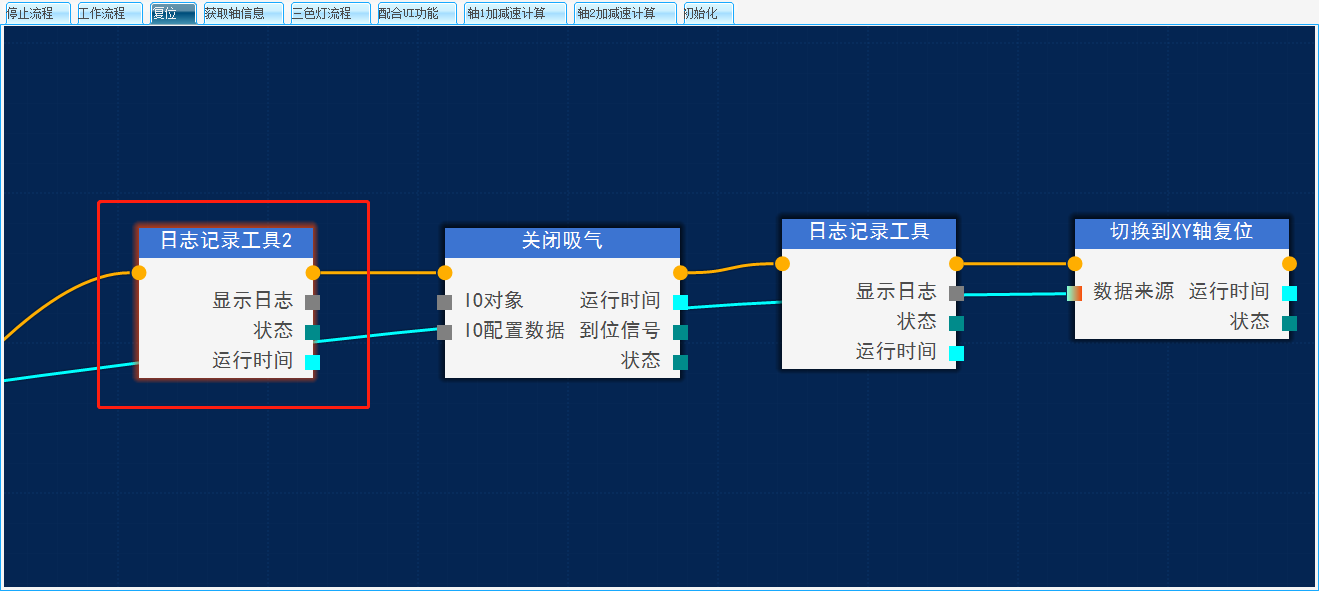
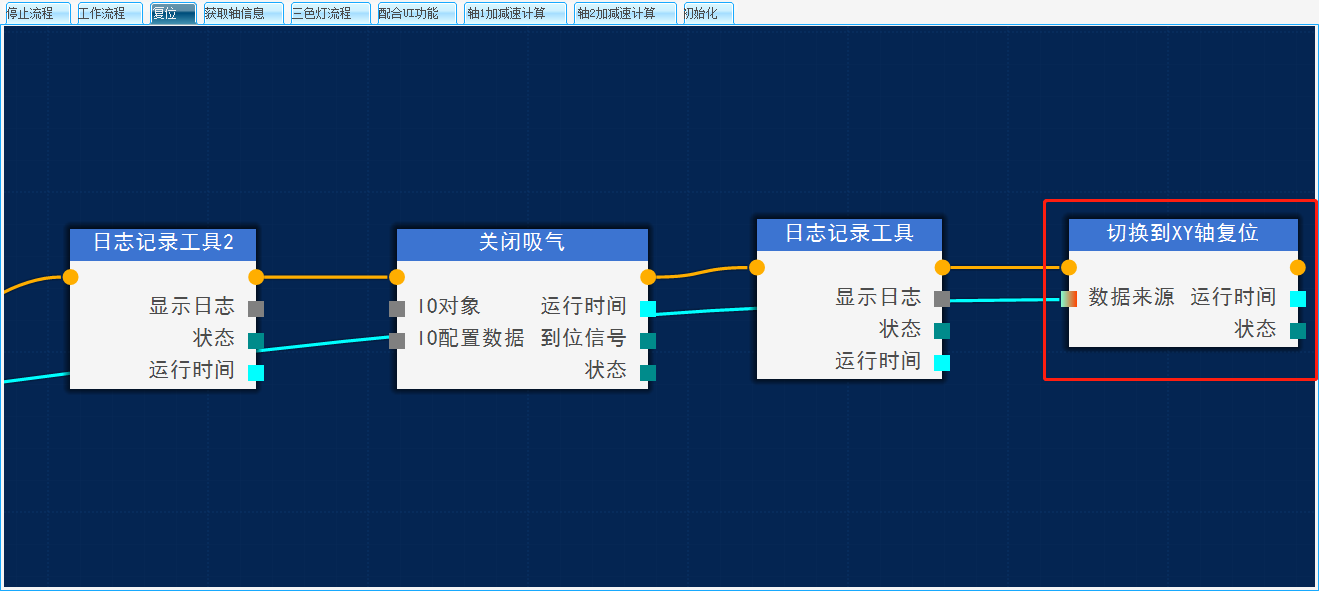
步骤6.关闭气缸:
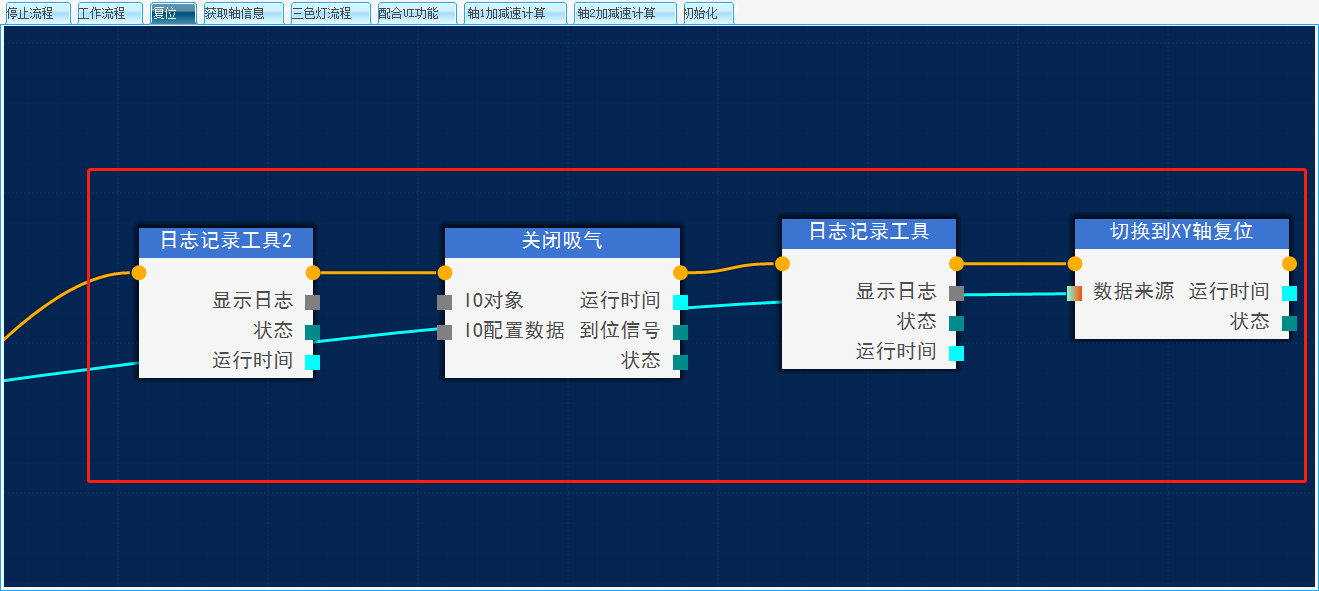
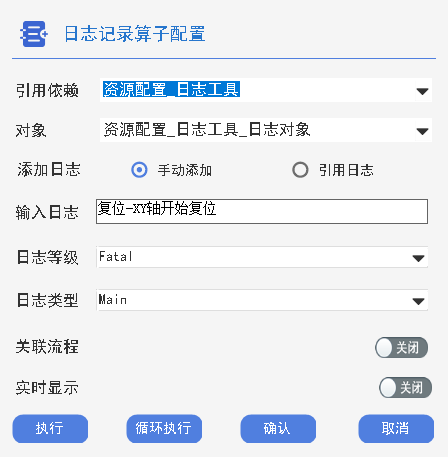
首先使用日志记录工具记录关闭气缸动作开始,配置引用资源管理器中日志工具算子
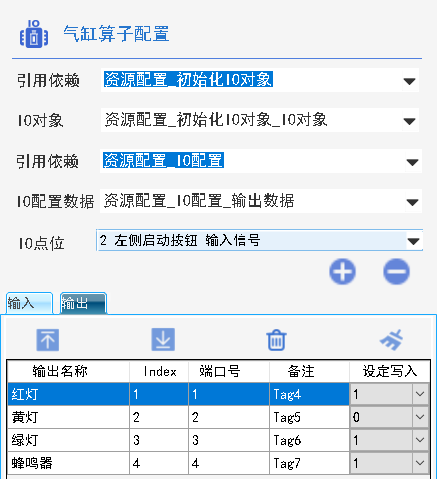
通过气缸算子实现将设备吸气关闭,引用初始化IO对象和IO配置算子输出资源,算子配置如下:
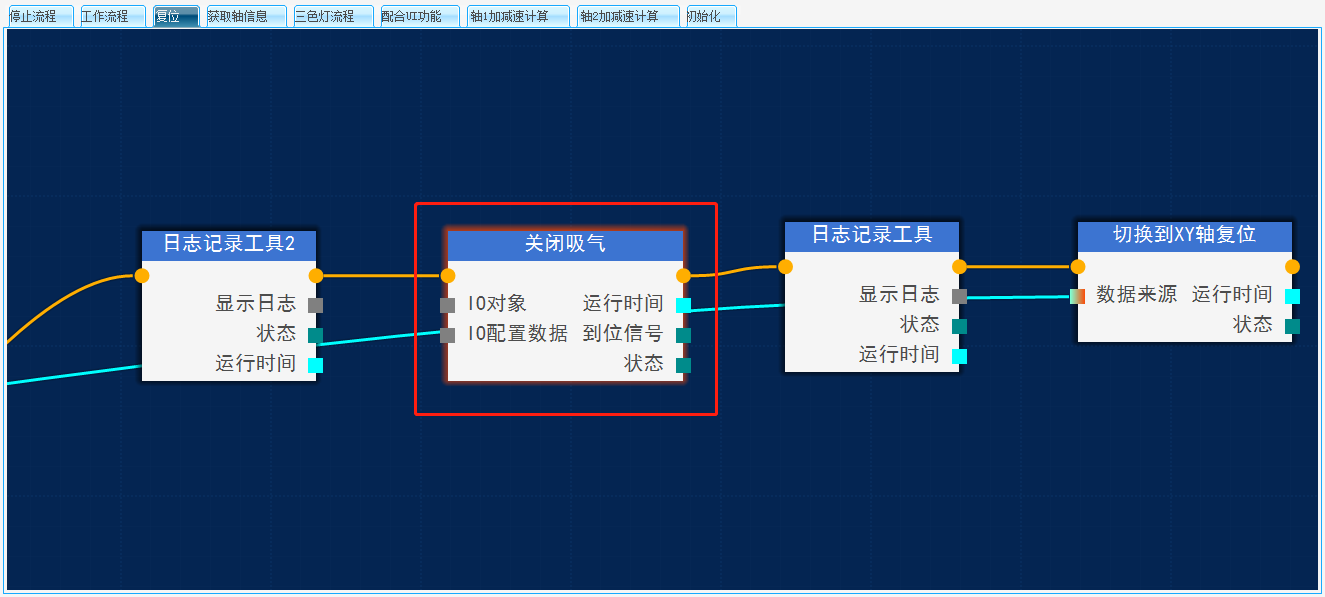
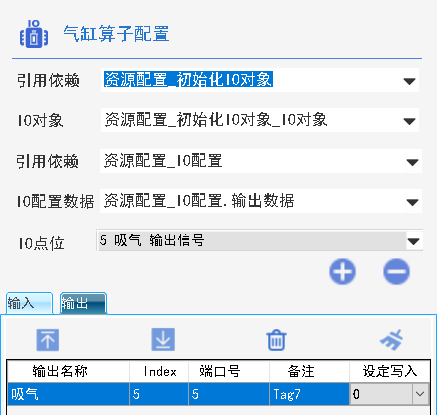
关闭之后再通过日志记录工具记录动作完成
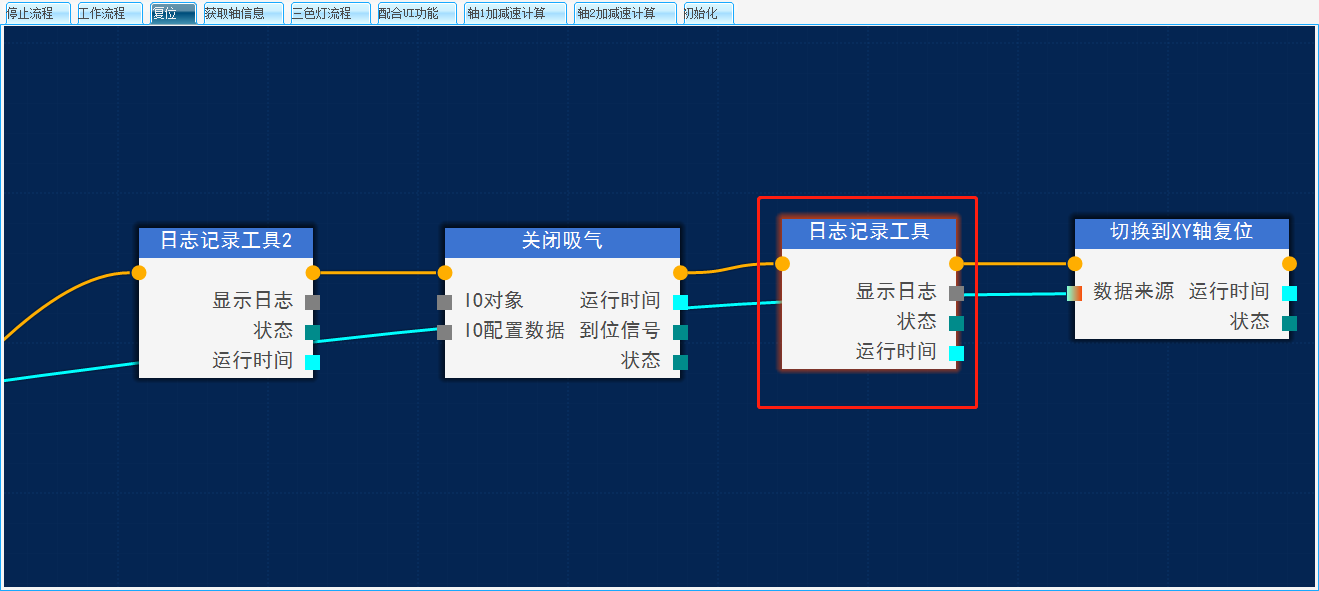

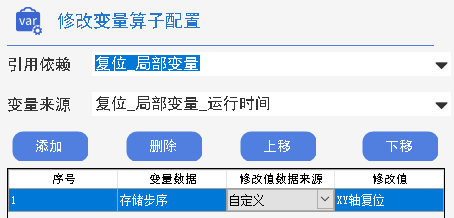
关闭气缸这一分支动作结束,通过修改变量算子修改存储步序结果,从而在下一次循环中执行下一步动作XY轴复位
步骤7. XY轴复位: 在XY轴复位中同样先通过日志记录工具记录设备运行状态
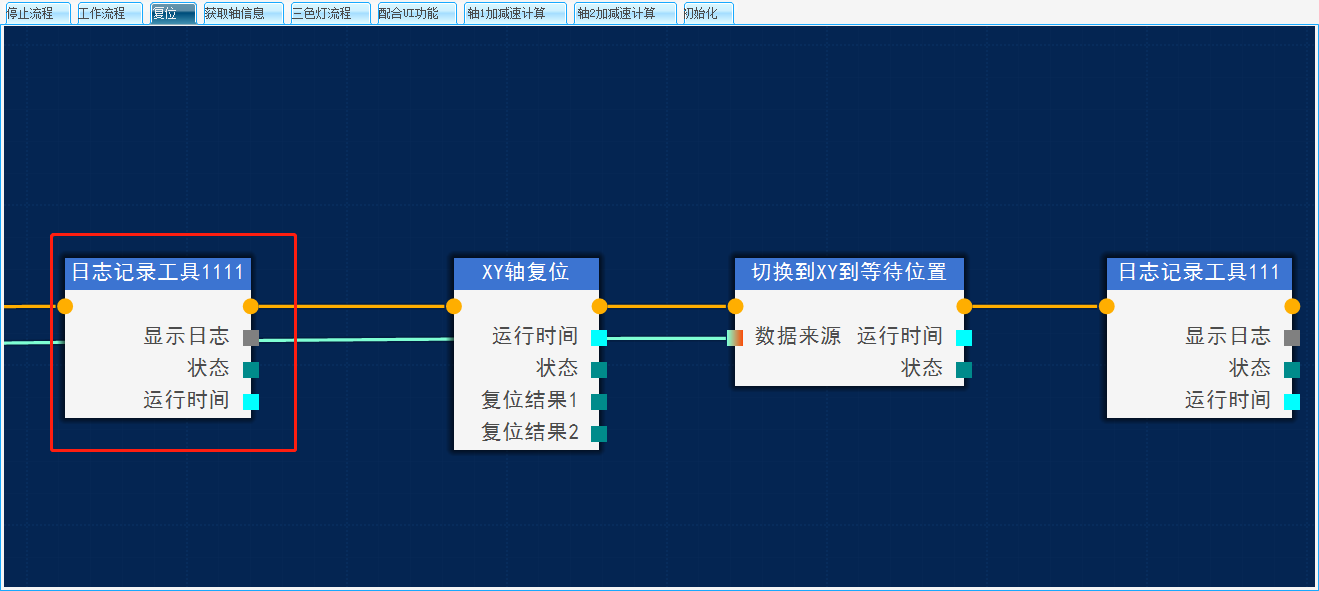
通过轴复位算子配置轴X和Y复位参数,轴复位算子控制轴复位会等待配置的所有轴在不出现报警时都完成复位才会结束运行,并且支持多种按照优先级的方式进行复位,引用初始化运控板卡对象,GS平台在复位方法上,提供了丰富且专业的 12 种回零模式,全面覆盖各类工业场景需求。其中 6 种基础模式包括:
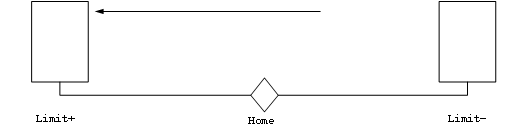
GH_Positive_Limit:此模式以正限位为原点,正限位回零是指轴从当前位置向正方向移动,直至触发正限位开关,然后反向低速移动至原点开关,最终确定机械零点位置的回零模式。此模式通过正限位开关作为初始定位参考,结合原点开关的精确定位,建立轴的绝对坐标系
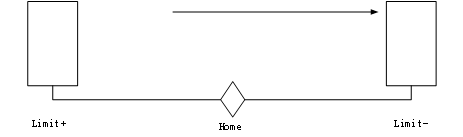
GH_Negative_Limit:负限位回零与正限位回零相反,轴从当前位置向负方向移动,触发负限位开关后,再正向低速移动至原点开关,最终确定机械零点。其原理与正限位回零一致,但运动方向相反。
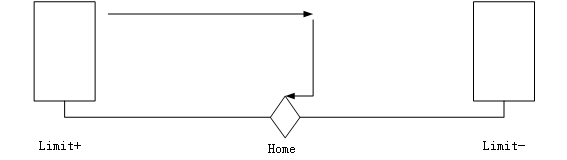
GH_HomePositive_Limit和GH_HomeNegative_Limit:此模块以正方向/负方向搜索原点,搜到到原点信号即停止运动,如果搜索不到会不停重复搜索,GH_HomePositive_Limit和GH_HomeNegative_Limit回零依赖编码器位置(轴初始化位置)。
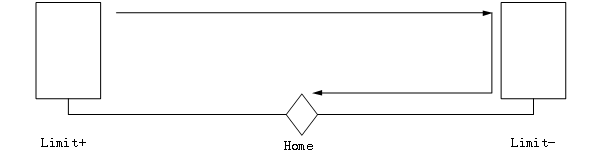
GH_PositiveHome_Limit和GH_NegativeHome_Limit:此种回零方式为无论轴处于何种位置先寻找正限位开关/负限位开关,搜索到限位开关后到再沿着反方向寻找原点信号,搜索到原点信号后轴停止运行,确认机械零点位置。使用GH_PositiveHome_Limit和GH_NegativeHome_Limit回零模式尤其适用于对位置精度、设备安全性要求较高的场景。
此外,平台还支持上述 6 种模式对应的带 Z 向信号回零模式,Z 向信号通常来自编码器等反馈设备,能提供更精准的位置校准参考,在需要高精度回零的场景,如精密加工、半导体制造中,带 Z 向信号的回零模式可显著提升回零精度与可靠性,使用时根据设备需求选择对应方法使用。
配置轴X、Y复位参数,如下
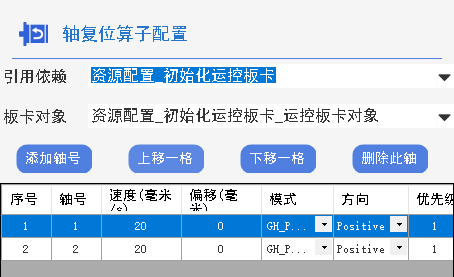
复位完成后通过修改变量算子修改存储步序结果,从而在下一次循环中执行下一步动作
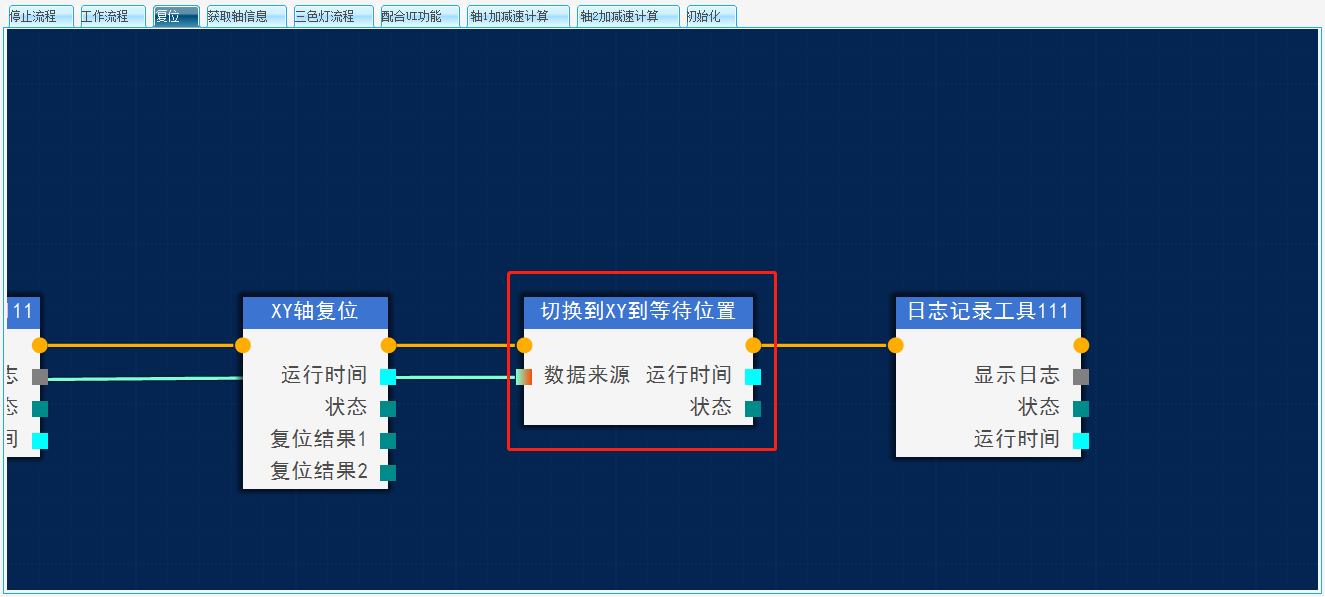
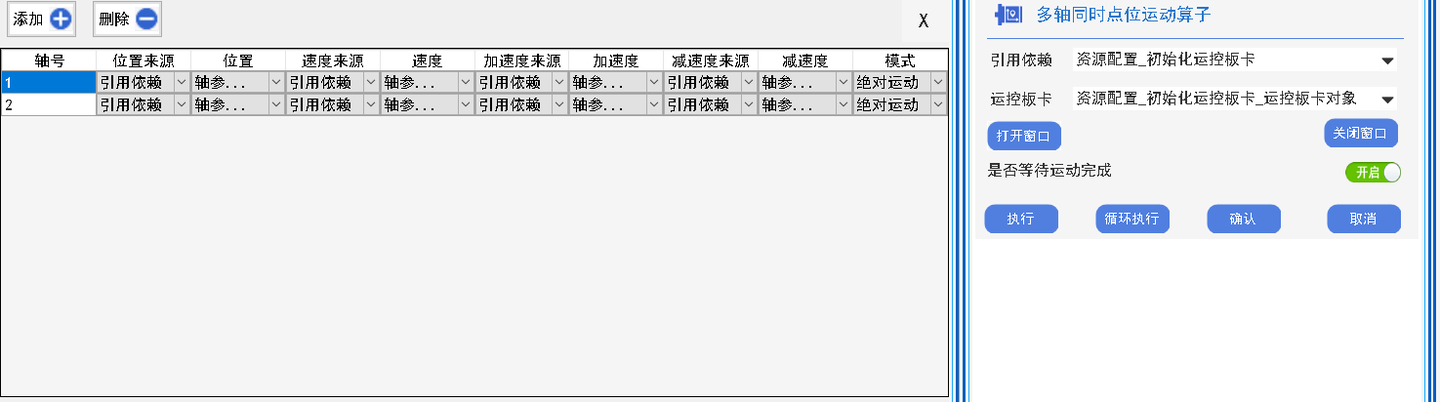
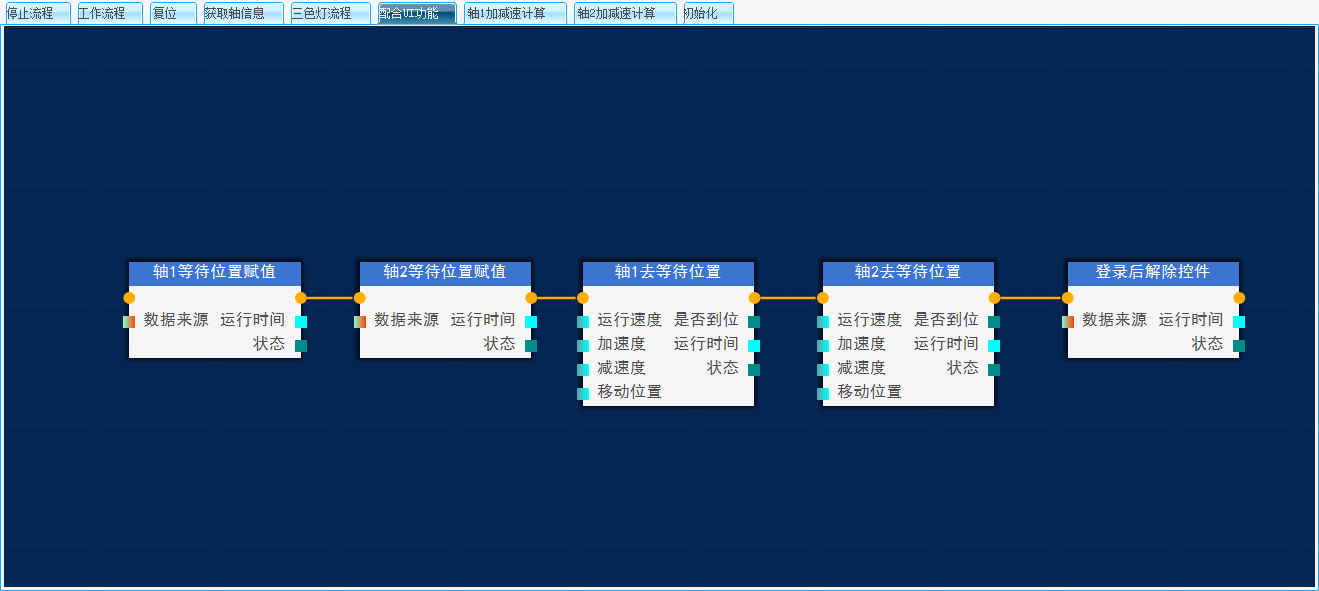
步骤8.XY到等待位:通过多轴同时点位运动算子控制轴X和Y移动到等待上料位置,算子引用初始化运控板卡,轴运行速度、位置等参数引用资源管理器轴参数内的变量,在制作HMI时通过控件绑定这些参数实现数据交互,算子即可使用,完成运行参数配置如下:
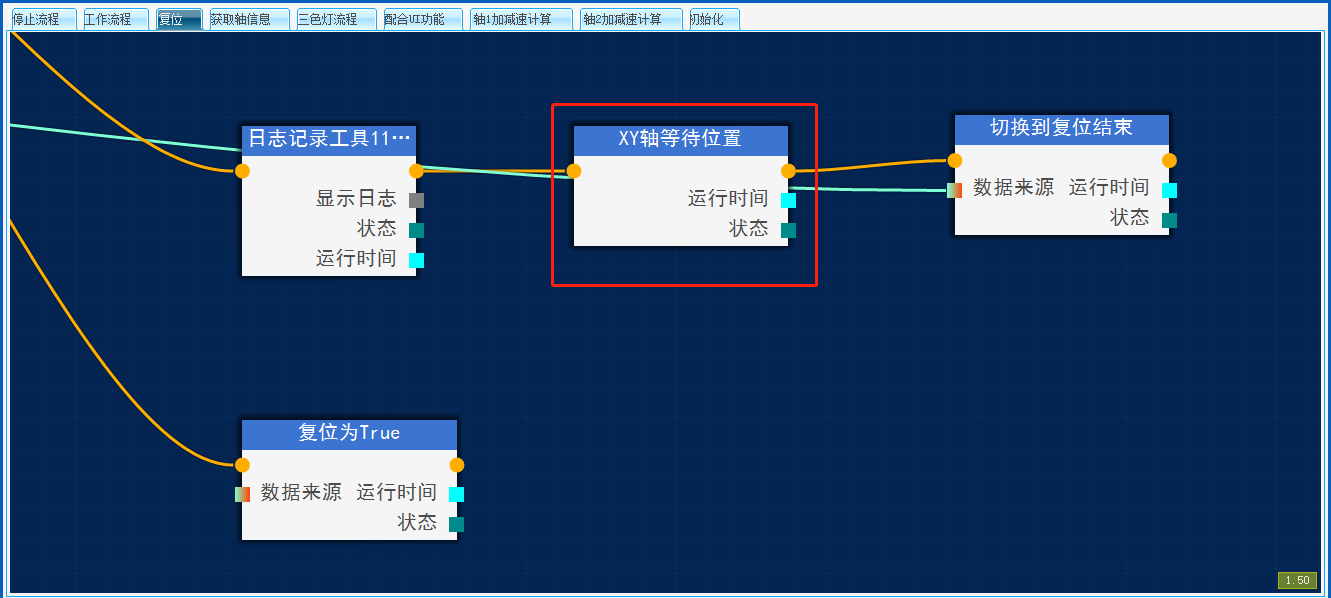
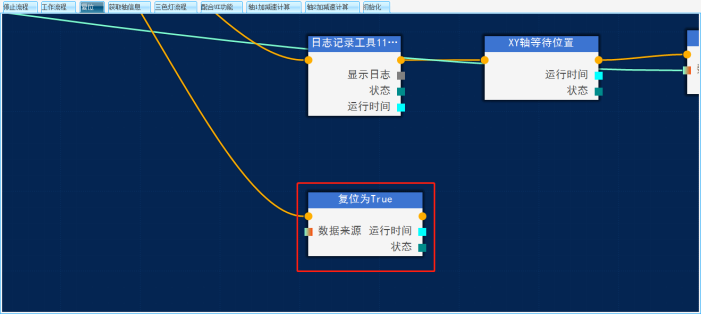
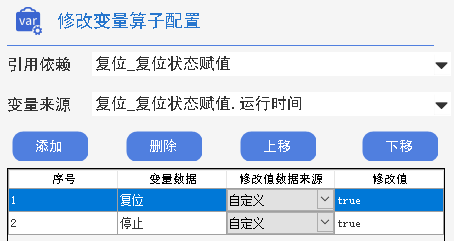
复位动作完成,将停止和复位变量结果赋值为true,循环算子配置的判断条件成立,复位流程结束运行,完成复位。
复位结束后需要恢复HMI控件为可使用状态。
第二步:工作流程开发
定义状态机变量,默认值为XY到等待位置:通过局部变量定义复位步序和存储步序,为后续实现状态机运行做准备,作为状态机状态
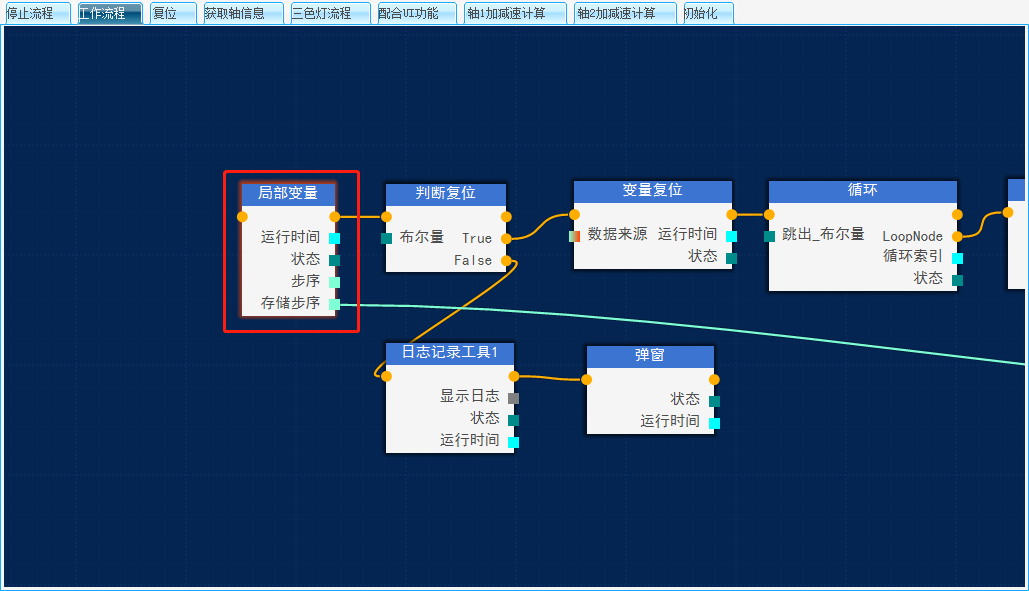
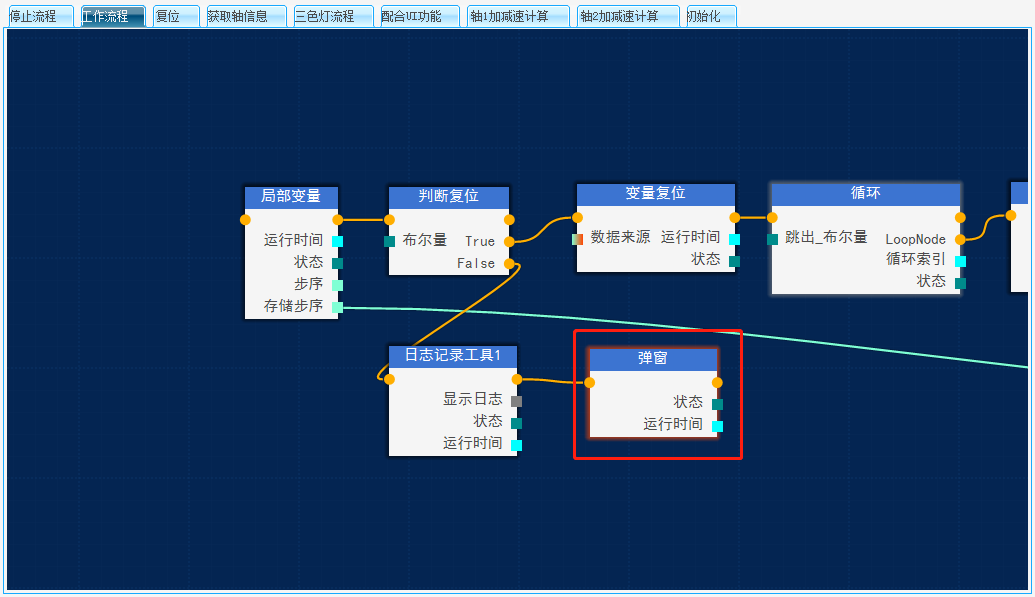
判断复位:在设备运行前,通过条件分支算子判断设备是已经复位,设备未复位不可开始运行。
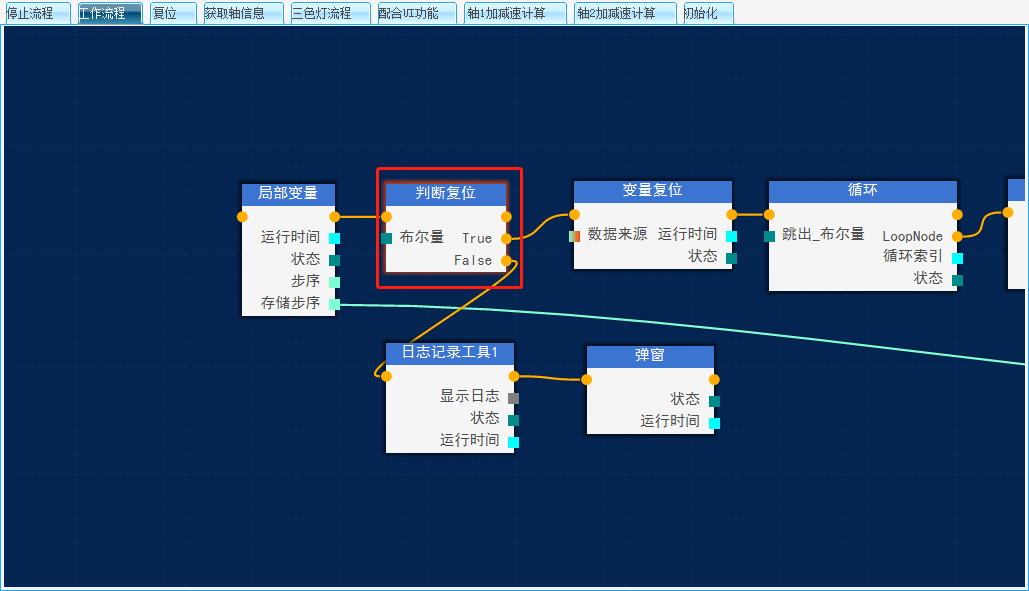
不可运行通过弹窗算子进行提示

同样的,开始运行前复位定位的变量,防止运行出现混乱,在设备运行时操作界面除停止外其他控件不可使用,对开始下禁用按钮赋值false

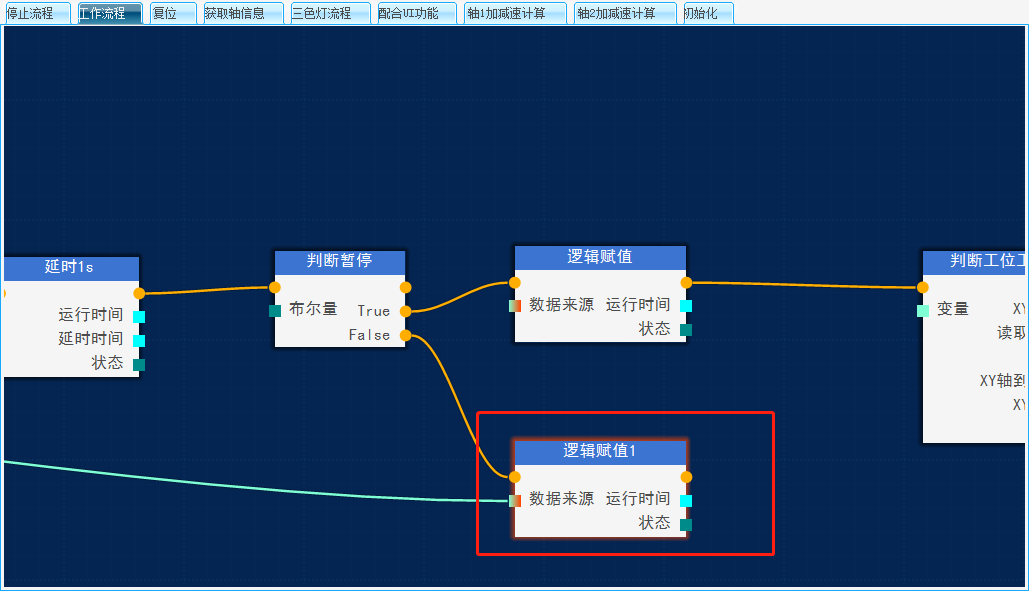
判断停止: 再使用循环工具和多分支工具实现状态机模式运行,循环算子配置为无限循环,让循环算子LoopNode节点后的算子处于轮询中,通过定义的停止变量控制循环是否继续运行即可,当手动点击停止按钮、设备报警以及复位动作结束时将停止变量赋值为true,循环算子达成停止条件,工作流程循环,设备停止运行。
判断暂停:设备实际不需要暂停功能,这里作为预留
使用修改变量将定义的存储步序变量赋值给步序
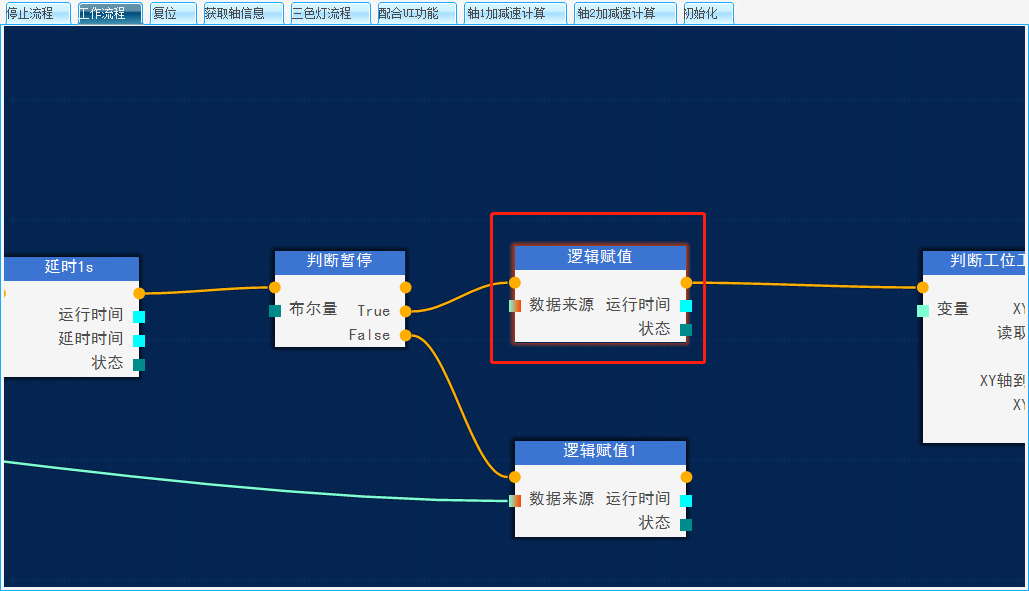
当出现暂停时将步序变量赋值给存储步序,实现状态机返回到上一步操作,防止上一步动作未完成就进行下一步,导致异常
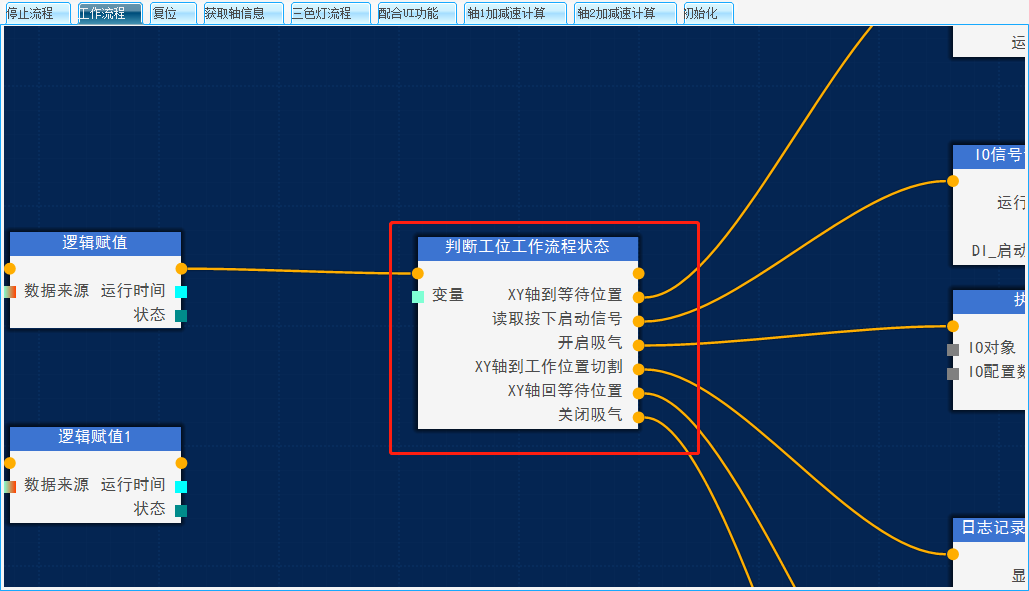
判断状态机变量:使用多分支算子定义工作执行的逻辑步序,引用定义过的局部变量步序,根据流程图上具体动作过程增加工作所需要的分支步序,配置动作名称,在执行时多分支算子根据步序变量和增加的分支步序名称做对比,相同则执行对应分支内搭建的算子。
XY轴到等待位置:设备启动前确保XY轴到达上料位置,通过多轴同时点位运动算子控制轴X和Y移动到等待上料位,算子引用初始化运控板卡,轴运行速度、位置等参数引用资源管理器轴参数内的变量,在制作HMI时通过控件绑定这些参数实现数据交互,完成运行参数配置如下:
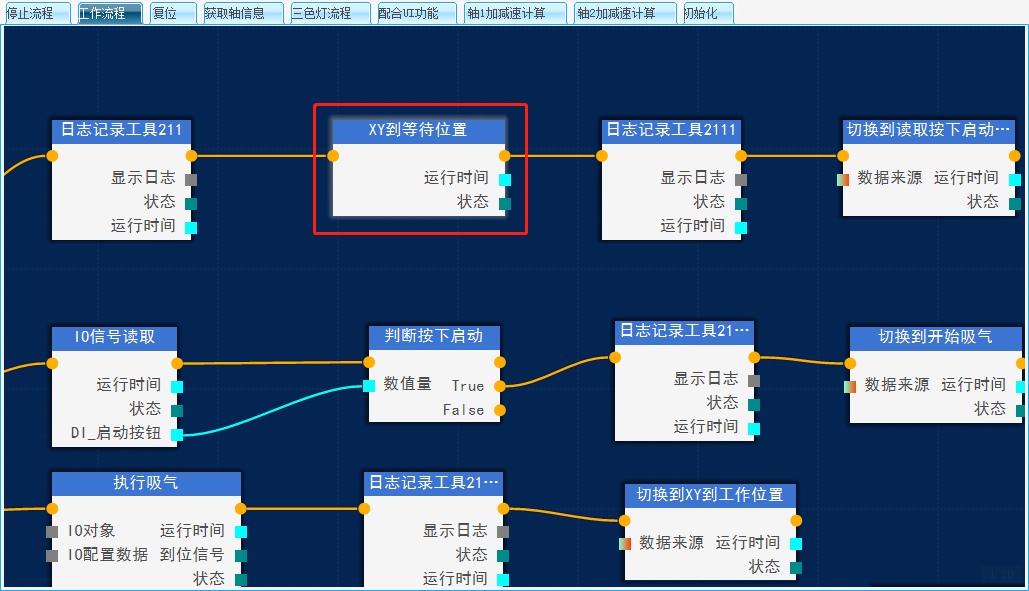

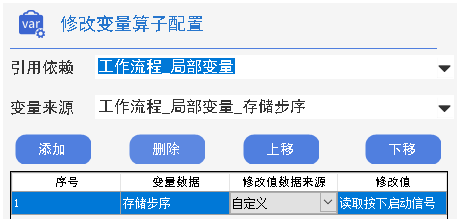
XY到位后通过修改变量算子修改定义存储步序值,在下一次循环执行下一个状态
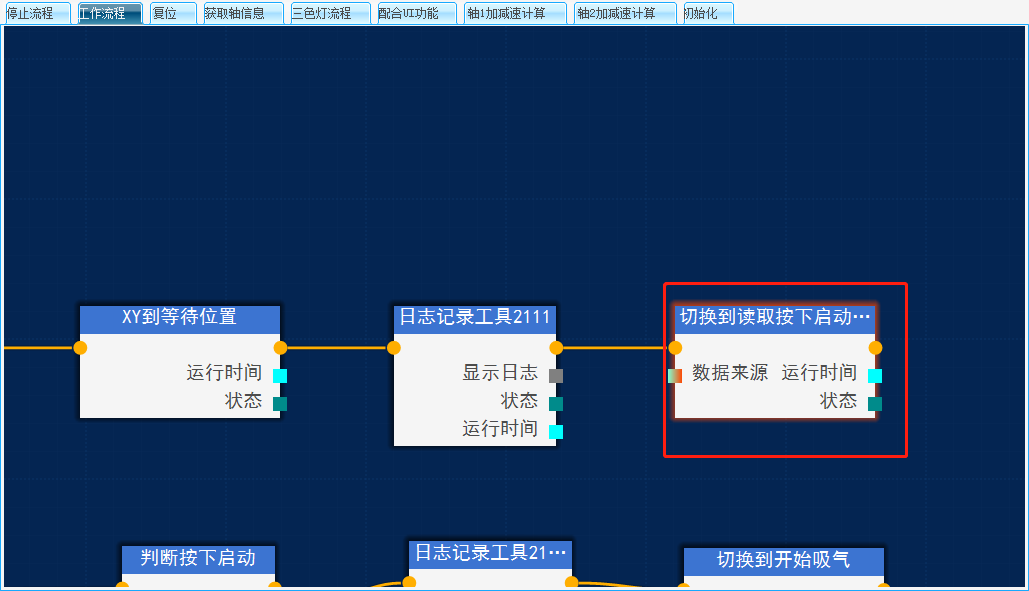
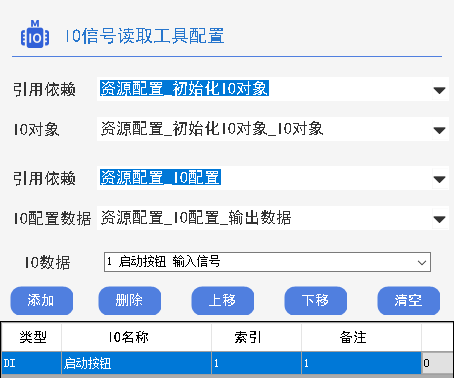
读取启动信号:将产品放到物料台后,按下启动按钮,通过IO读取算子引用资源管理器初始化IO对象和IO配置算子输出IO资源实现启动按钮信息读取,配置读取IO如下图所示:
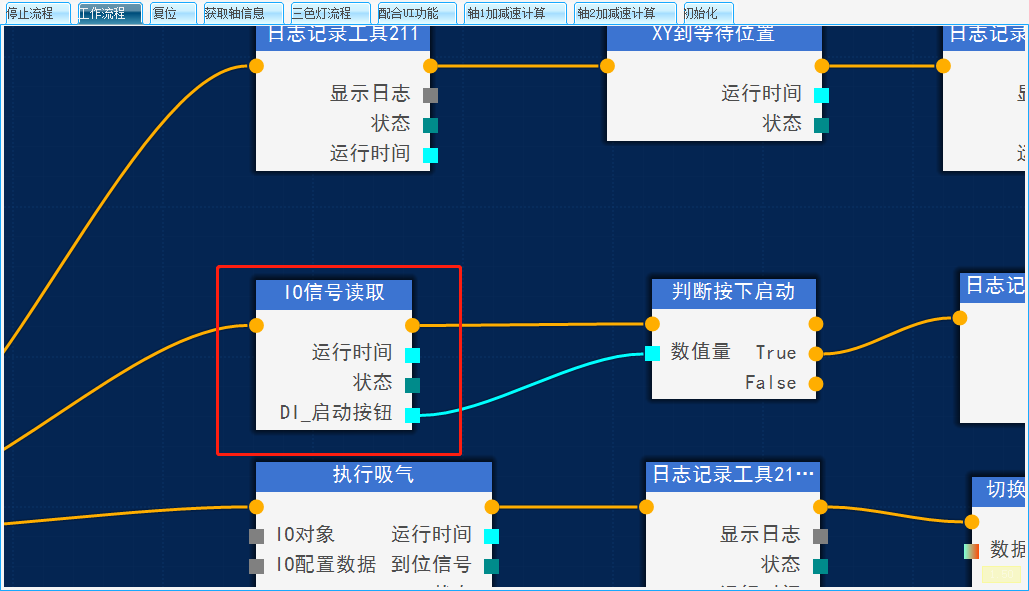
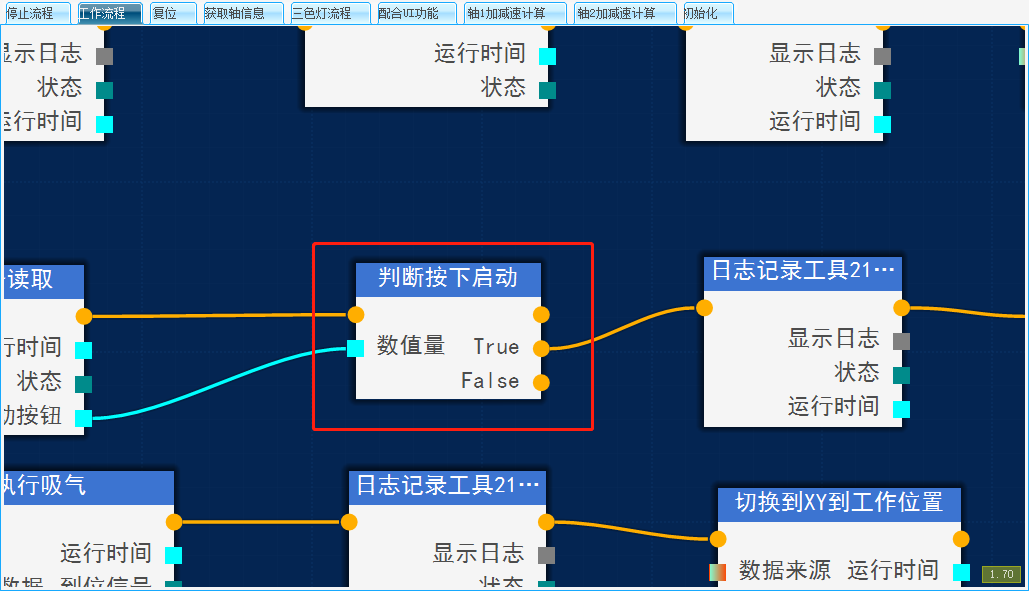
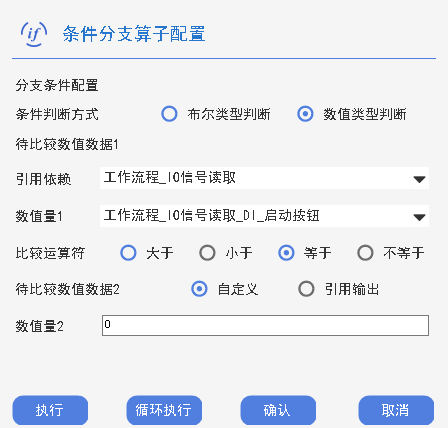
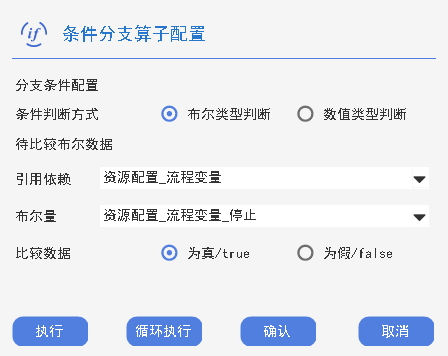
然后通过条件分支算子判断读取启动信号的值是否为低电平,低电平表示启动按下被按下,进行下一步。
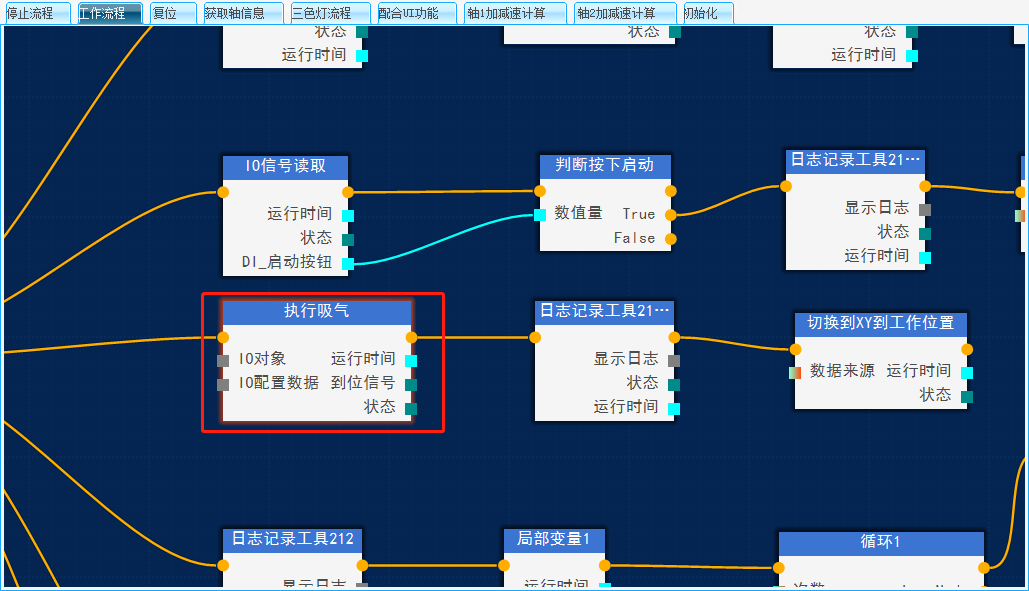
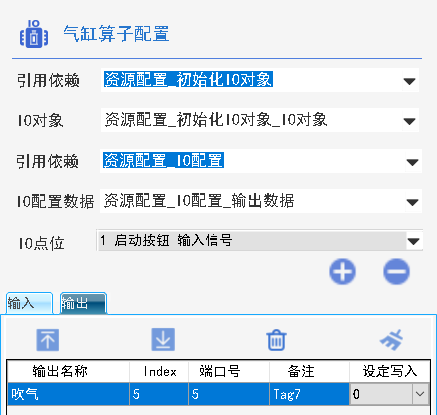
执行吹气:使用气缸算子控制设备吸气吸住产品,配置如下:
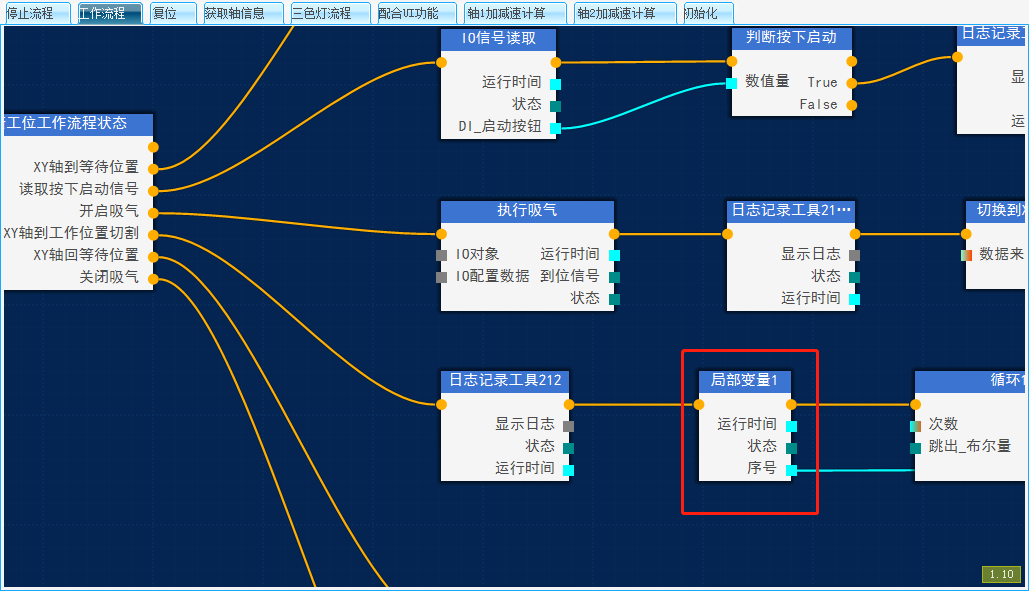
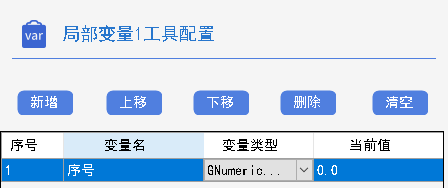
判断是否达到切割次数:根据需求,产品切割或打标的样式、位置以及切割打标模版需要能够任意配置,每个模版都对应了一组XY工作位置,实现功能为走到工作位置调用一份模版文件执行打标切割动作,因此使用局部变量算子先定义序号变量,用于接下来获取打标切割时需要的坐标
在资源管理器流程变量内定义长度变量,用于存储使用人员生产时需要调用的打标切割模版数量,使用循环算子配置为固定次数循环,引用长度变量,实现使用所有打标切割模版,跳出循环引用停止
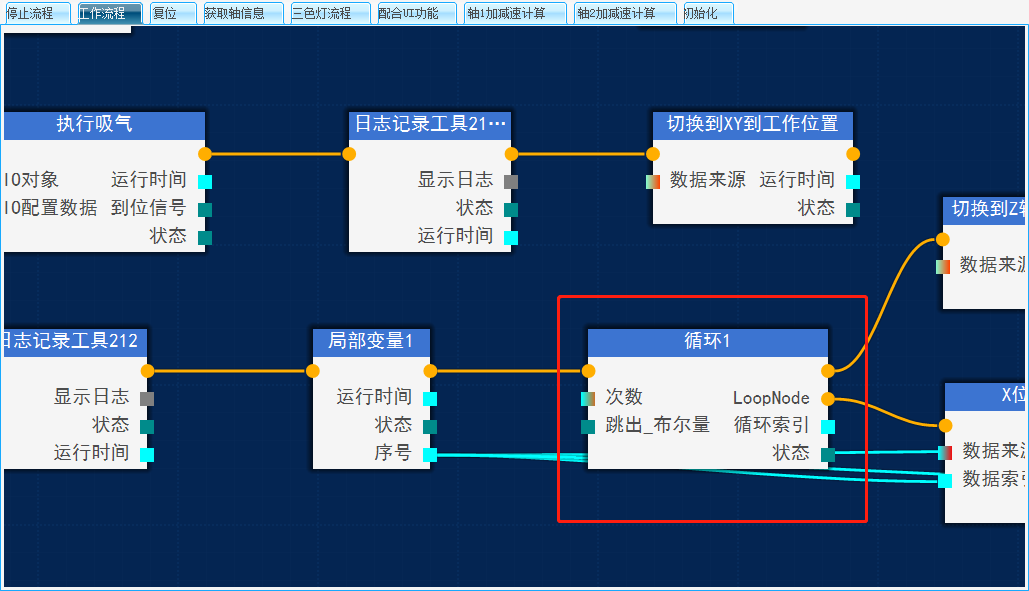

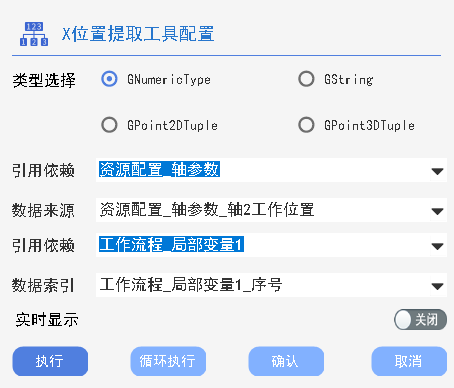
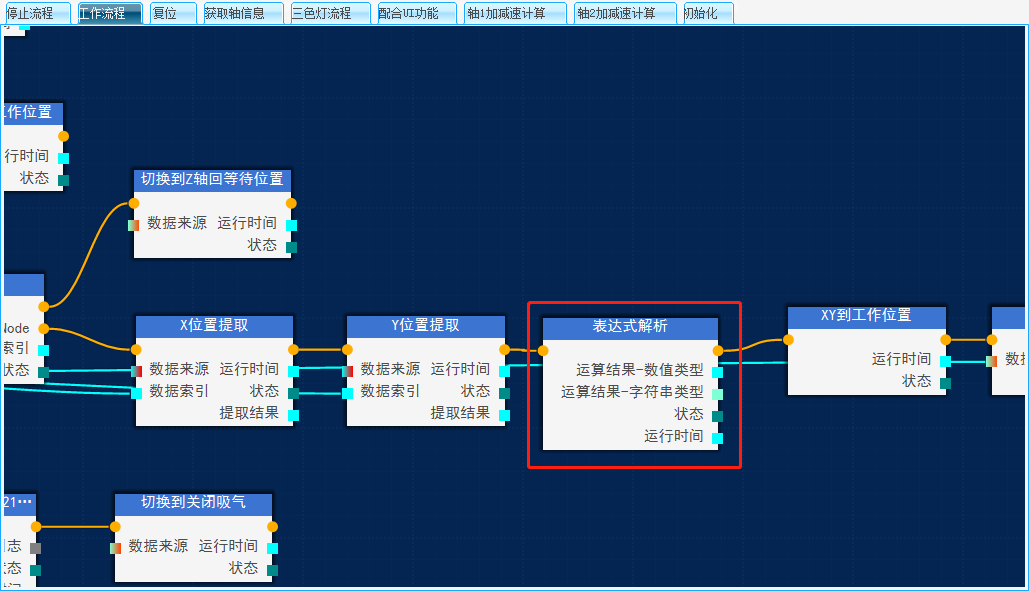
X工作坐标存储在资源管理器轴参数内的轴1工作位置变量,Y工作坐标存储在轴参数内的轴2工作位置变量,数据格式实际为数组形式(例如100,20,10),由HMI控件赋值,数组结构不能直接应用,因此使用过数组元素提取算子提取出每次需使用位置
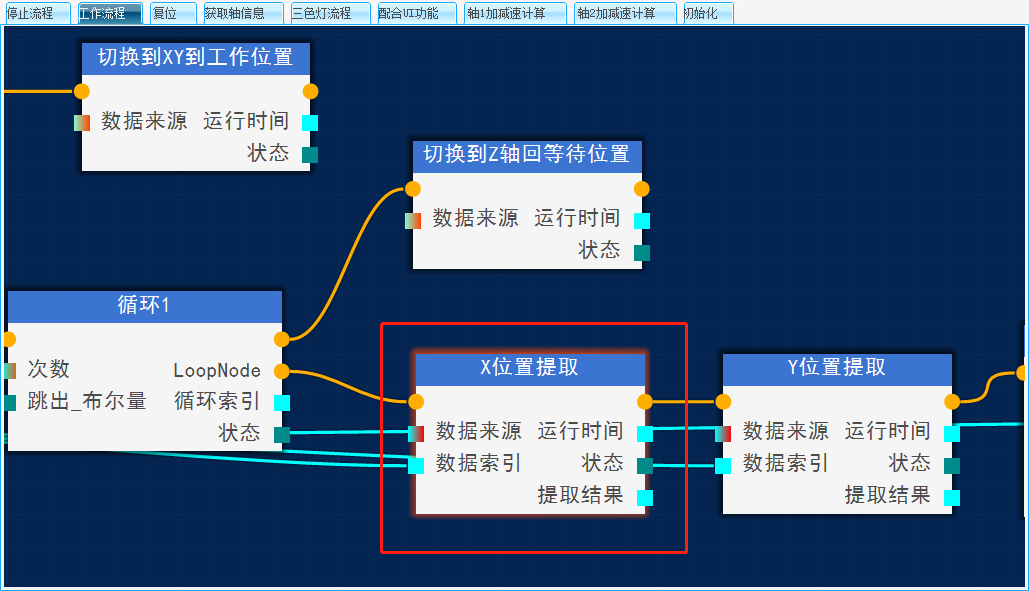
XY到工作位置:使用多轴同时运动算子控制XY轴移动的打标切割位置,使用提取到的XY位置,位置来源于上述使用数组元素索引算子提取出来的XY位置
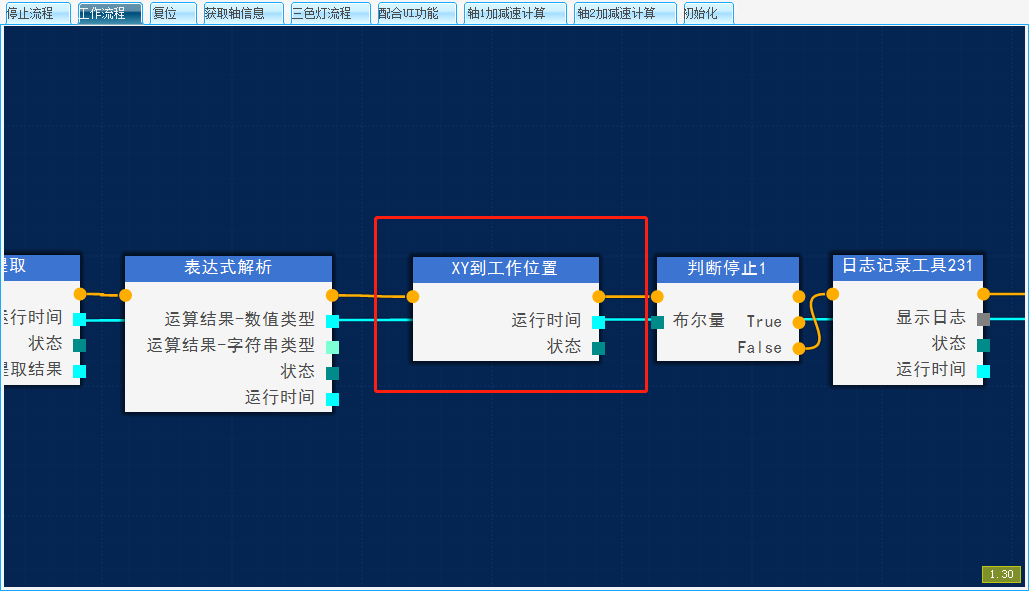

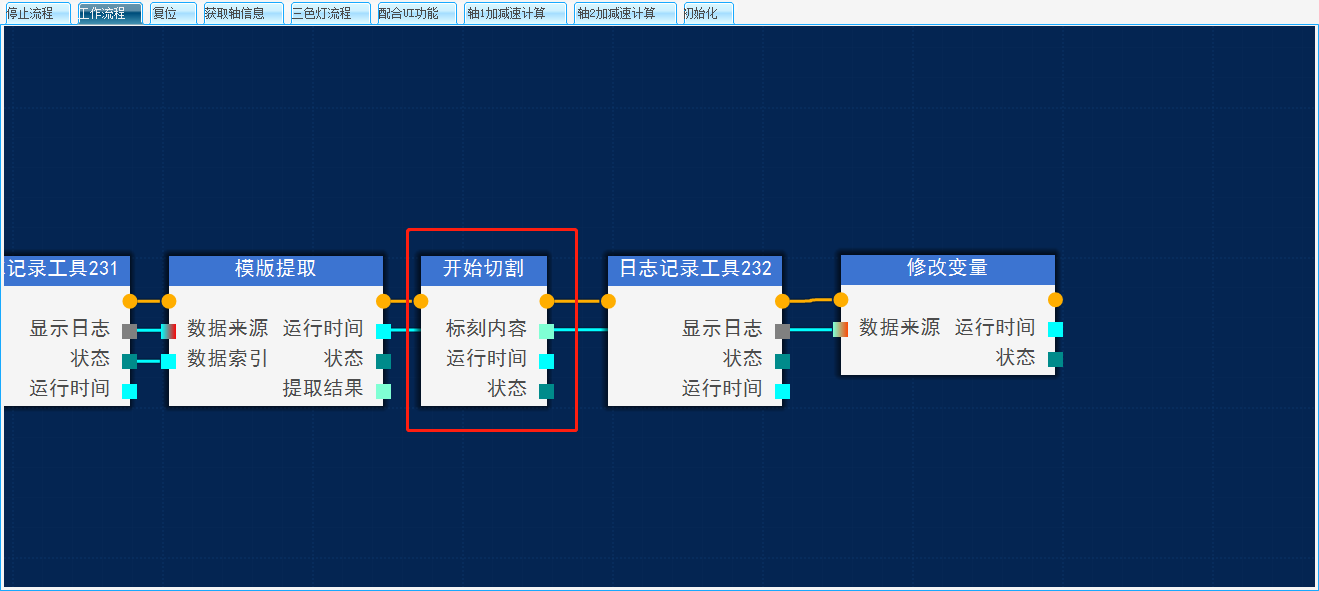
切割:轴移动工作位置和打标切割是两个动作,因此在执行打标切割前需要判断设备是否停止,不停止的情况下才能进行进行打标切割
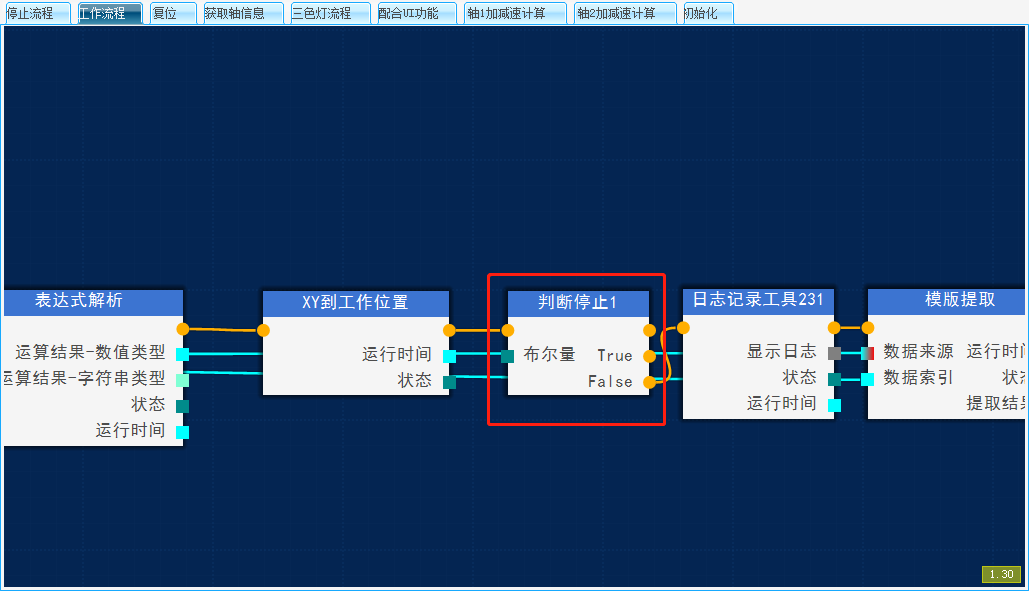
模版路径在资源管理器轴参数内的模版路径,数据格式同样为数组形式,由HMI控件赋值,使用过数组元素提取算子提取出每次需使用模版路径
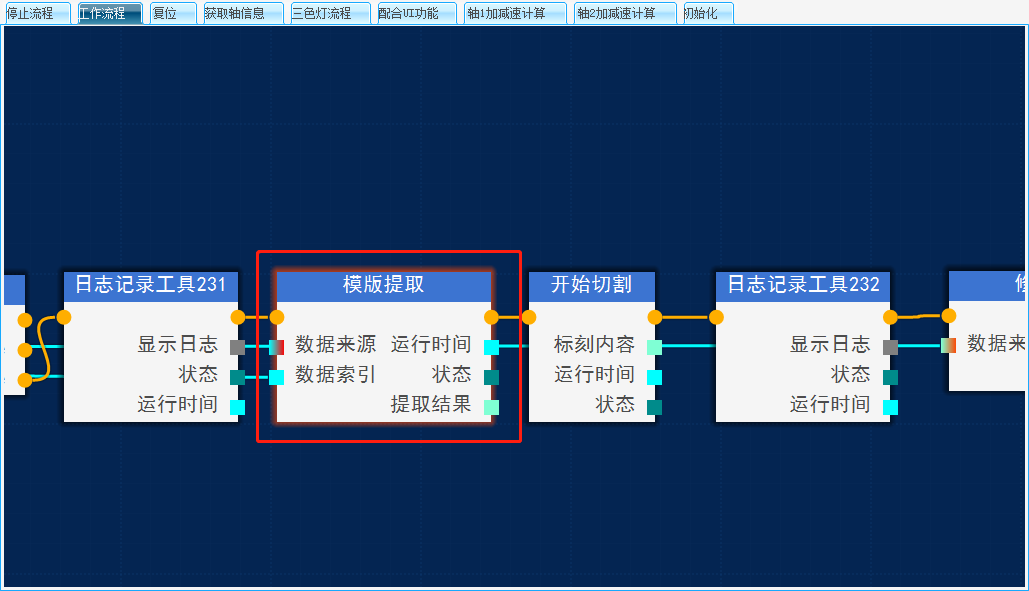
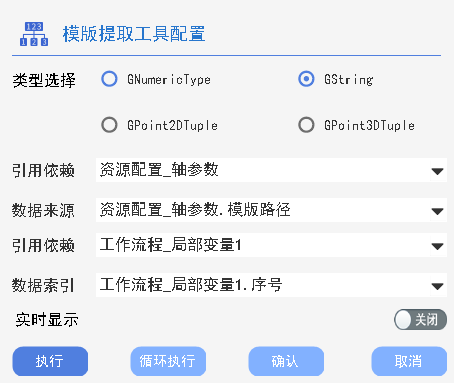
再使用金橙子二代卡标刻算子引用模版提取结果,实现打标切割
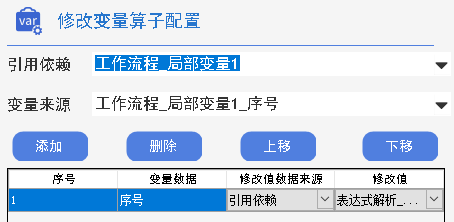
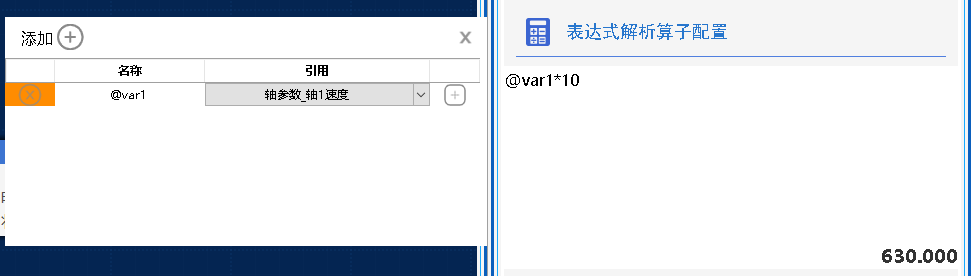
确保提取数据索引根据循环次数变化,循环一次时提取索引为0的位置,循环二次提取索引为1的位置,使用表达式解析引用定义序号变量做简单运算
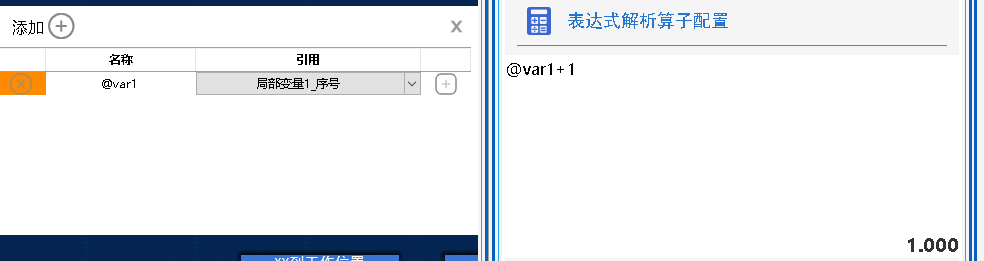
计算完后通过修改变量将结果给到序号实现跟随循环次数获取对应索引位置
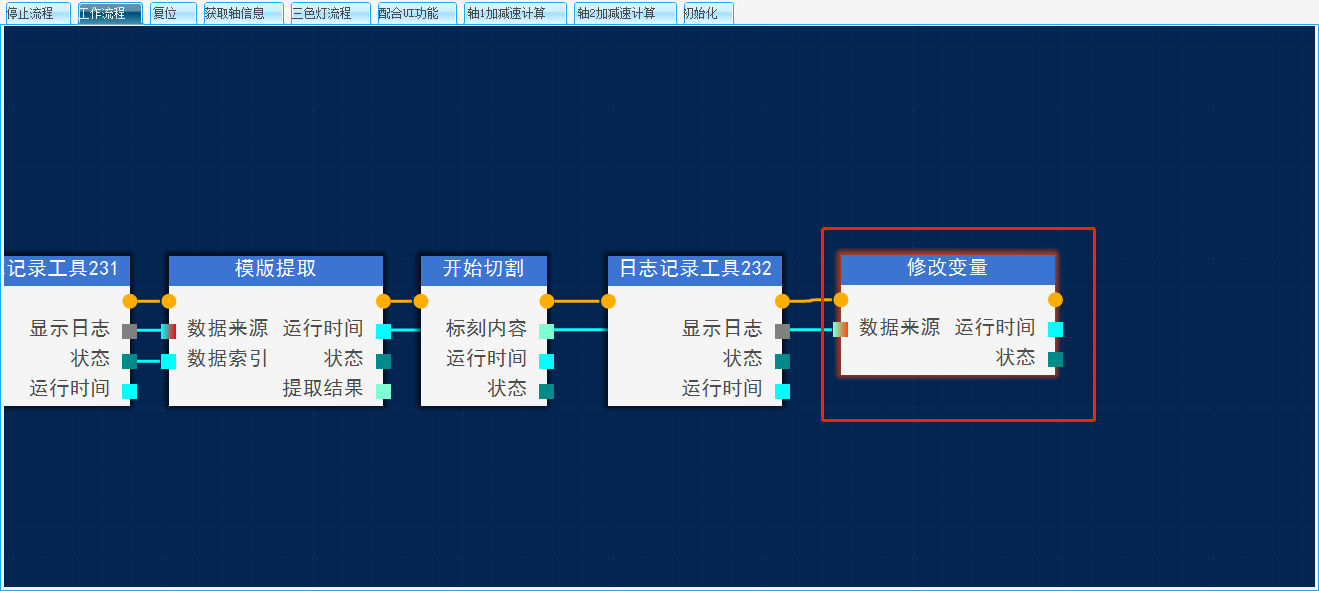
XY到等待位置:将所有模版使用完后使用多轴同时运动算子控制XY将物料送出
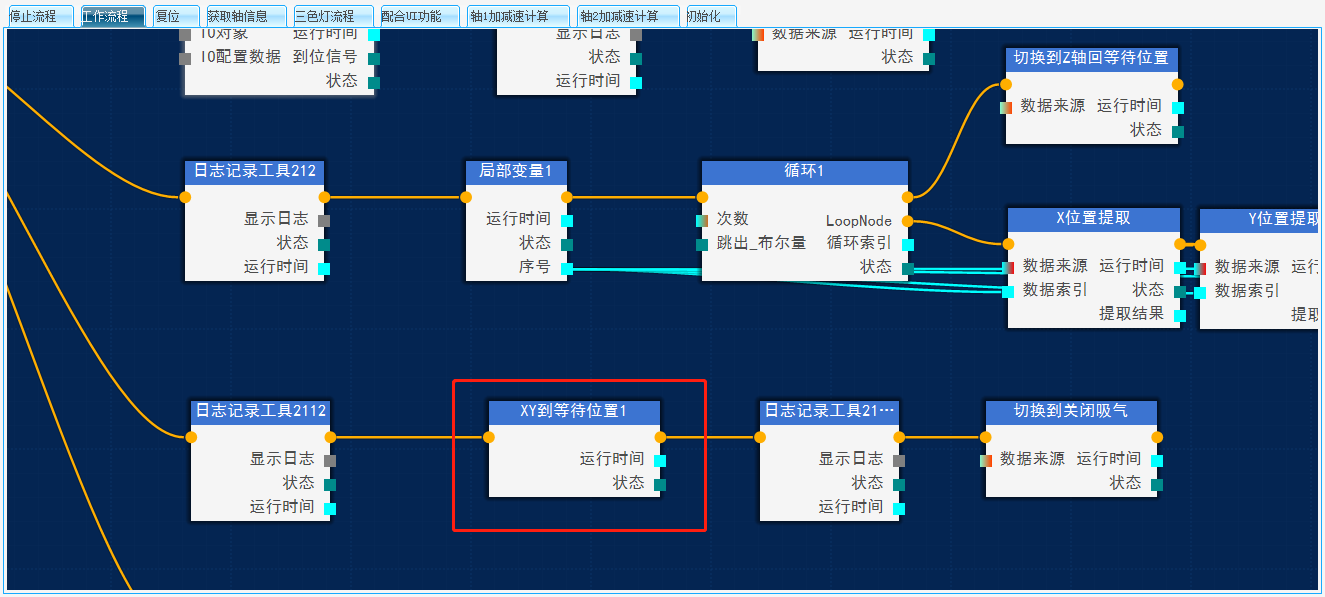

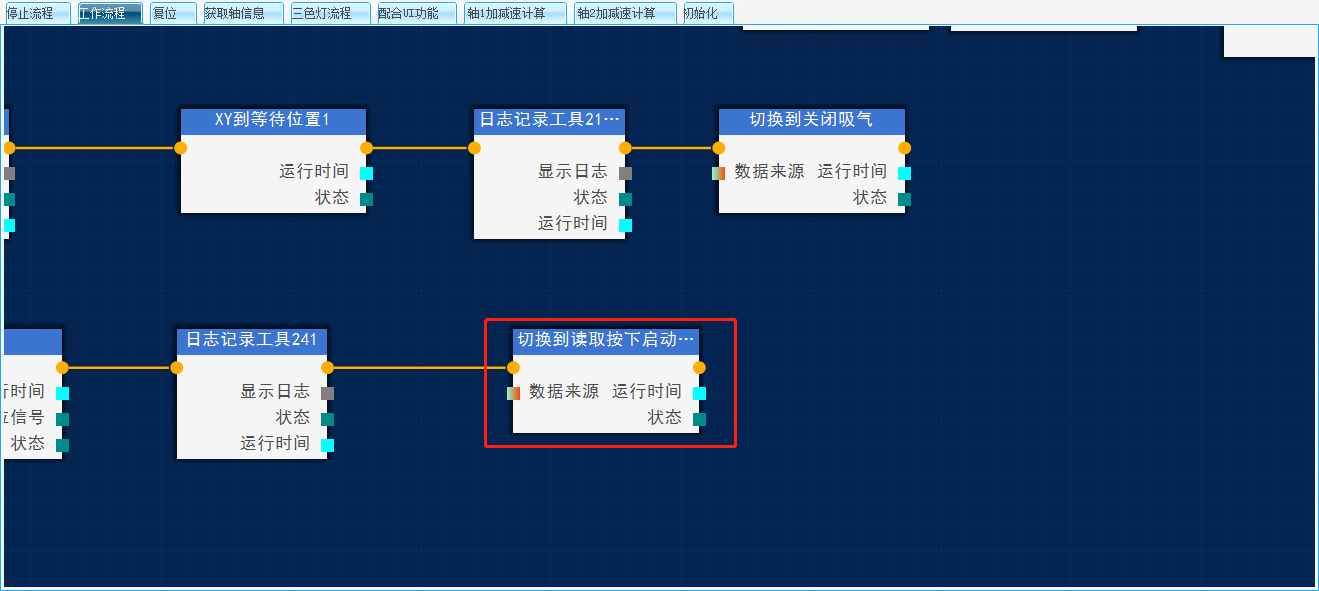
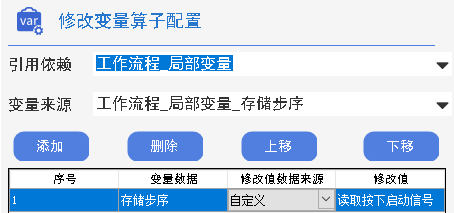
到位后使用气缸算子控制设备关闭吸气,让人工将物料取出,使用修改变量算子控制步序为读取启动信号,等待下一张物料打标切割
第三步:其他流程
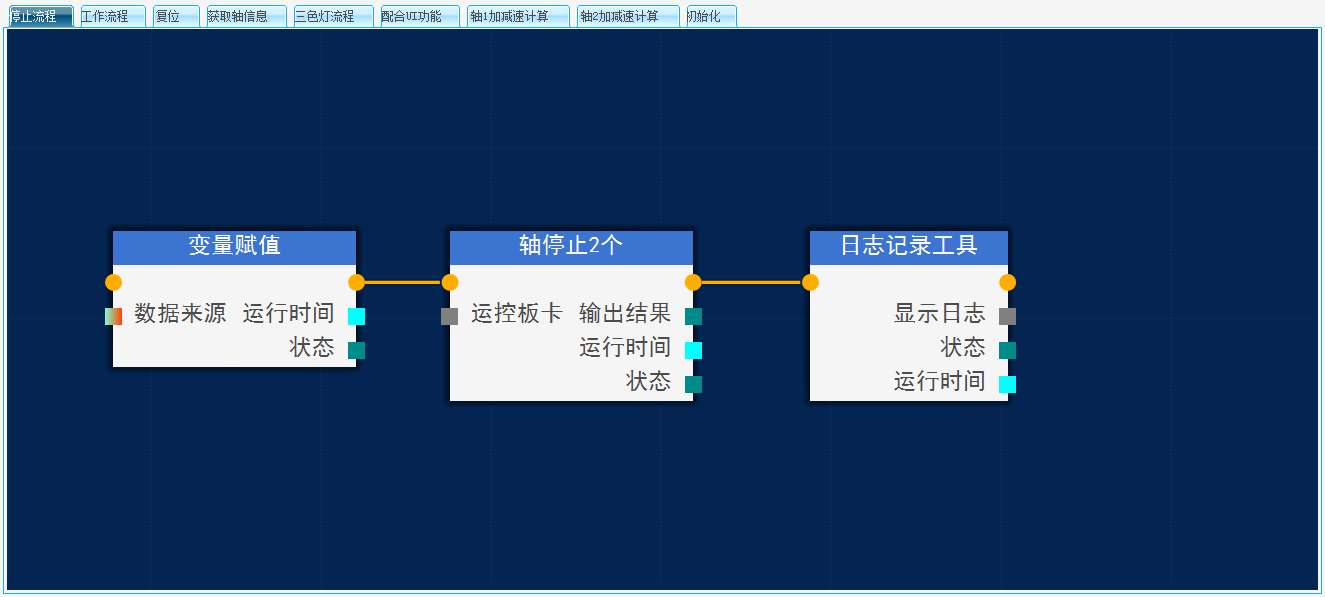
1.停止流程:负责控制2个轴的停止以及变量的复位
2.轴信息获取流程以及三色灯流程:软件界面打开时执行
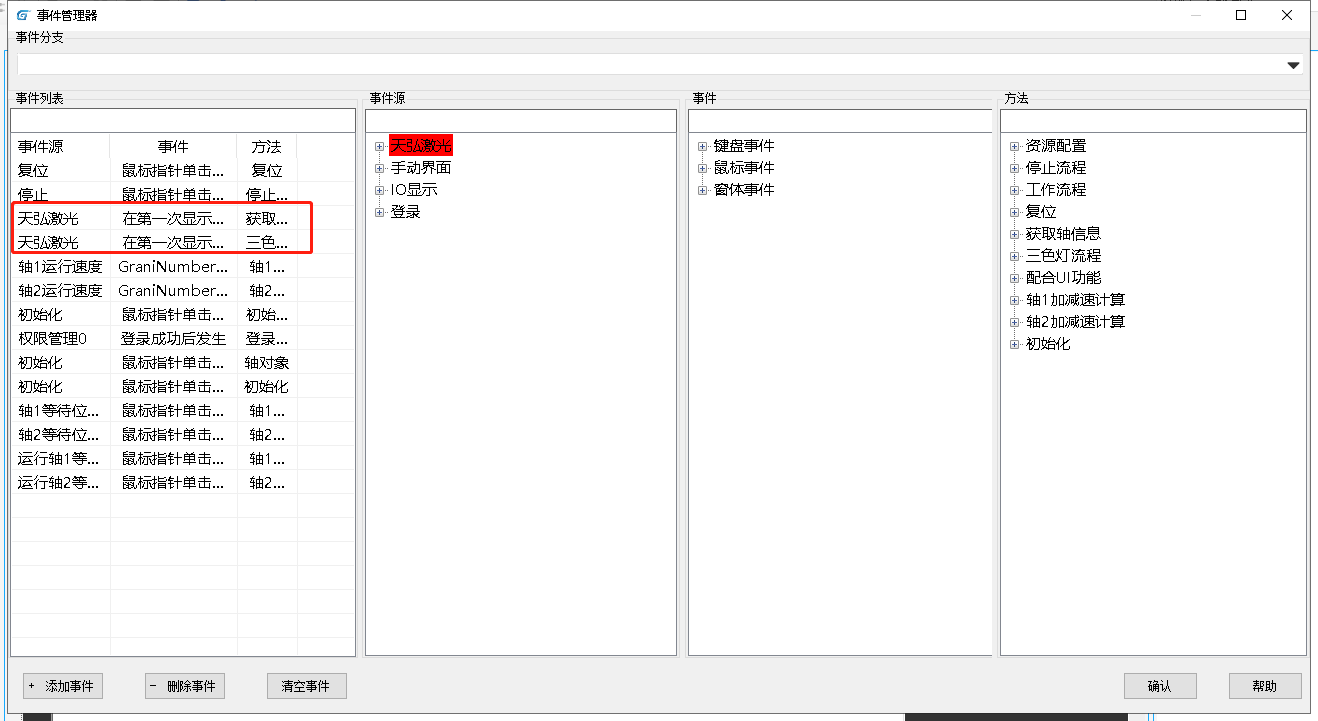
执行方式:此流程在主界面打开时自动运行,通过HMI窗体开始运行事件触发轴信息和三色灯流程执行
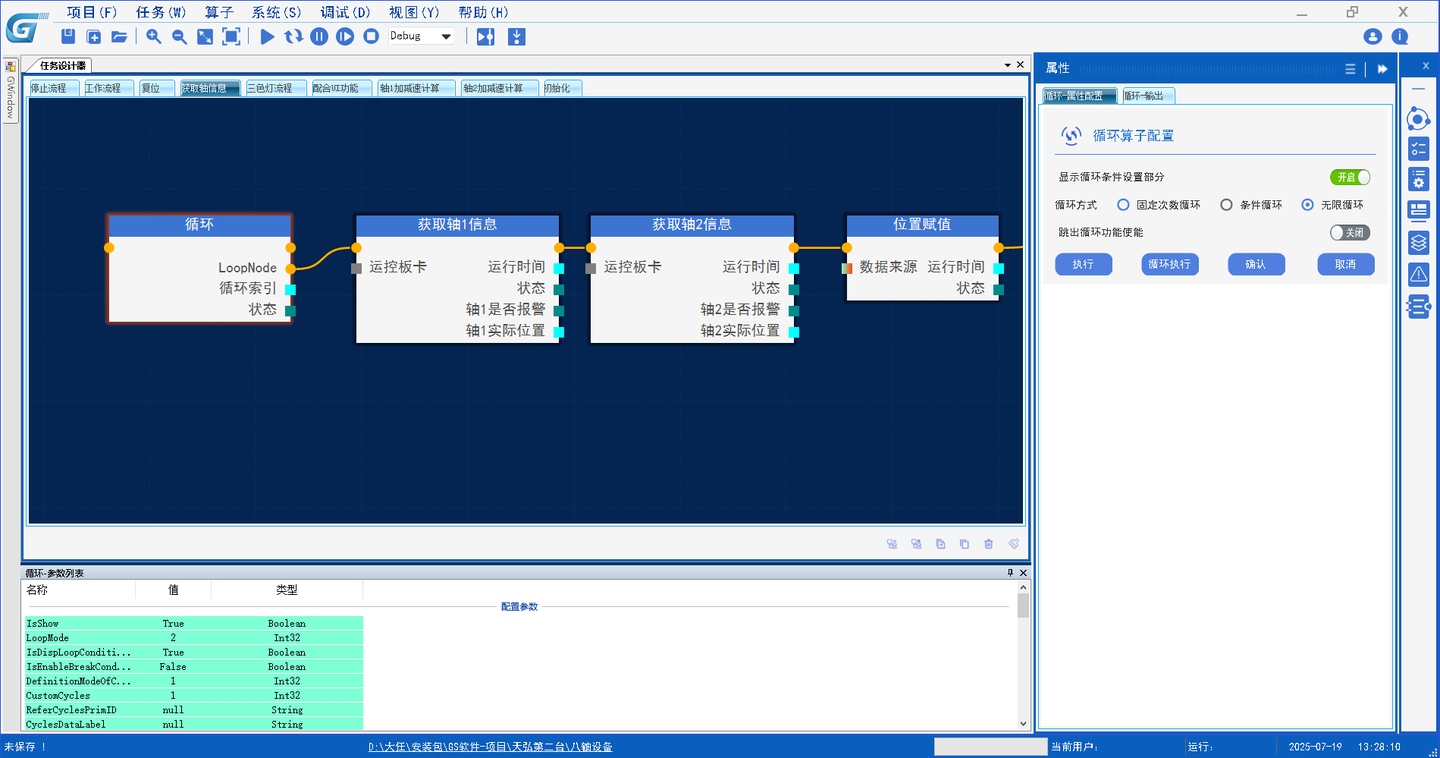
实时获取轴信息:
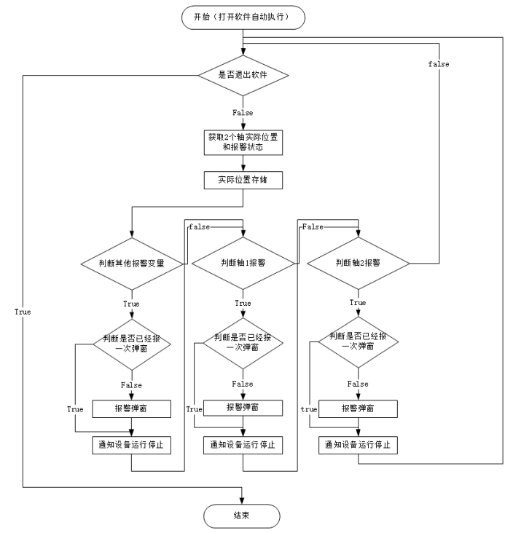
是否退出软件:流程打开HMI时自动执行,通过循环算子实现长时信息获取,配置为无限循环,当使用人员关闭软件时此流程退出
获取2个轴的信息:使用获取轴信息算子得到轴位置与报警信息,设备有2个轴,因此使用2个获取轴信息算子,算子配置如下图:
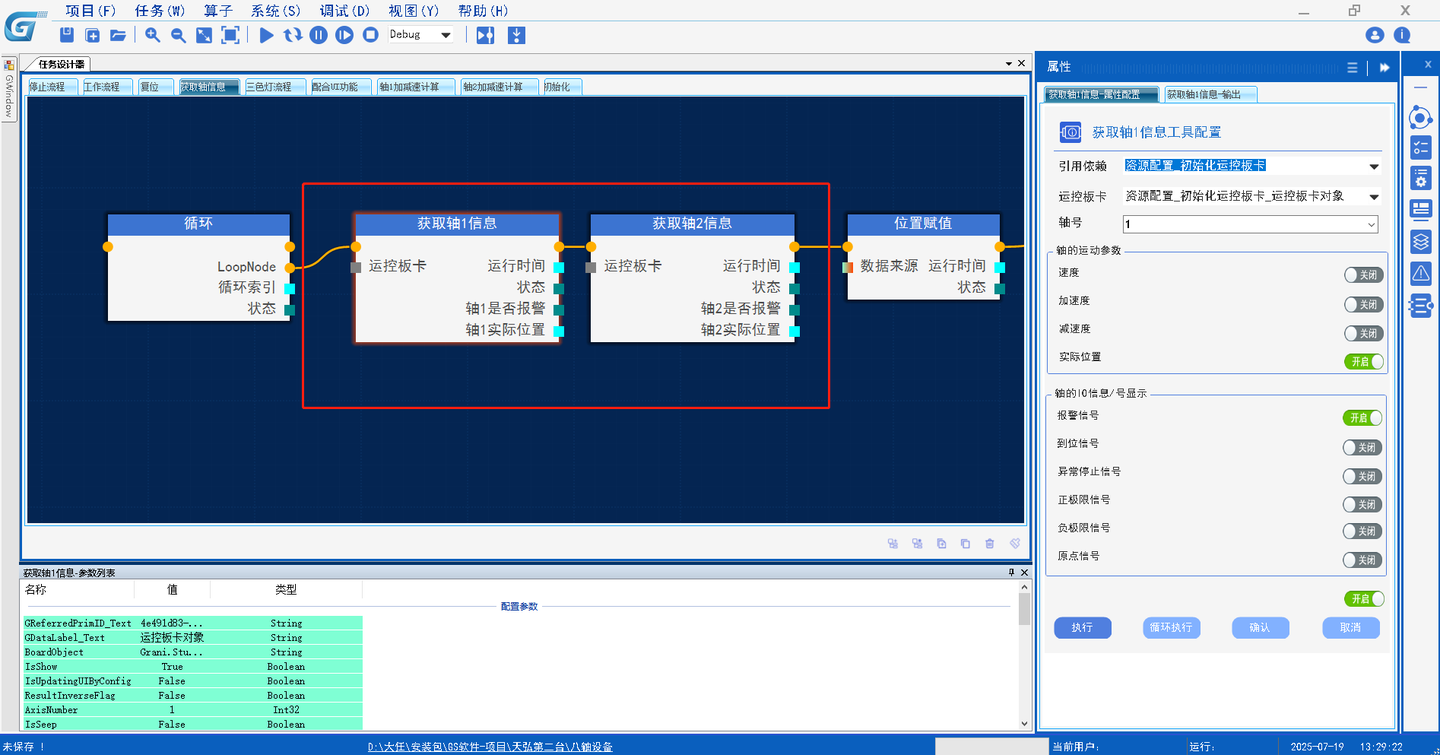
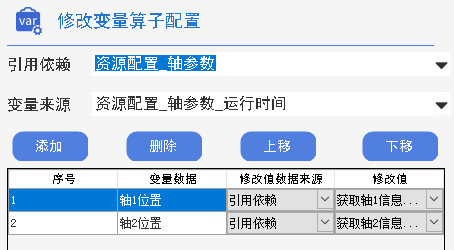
实际位置存储:通过修改变量算子将获取位置存储到资源管理器中
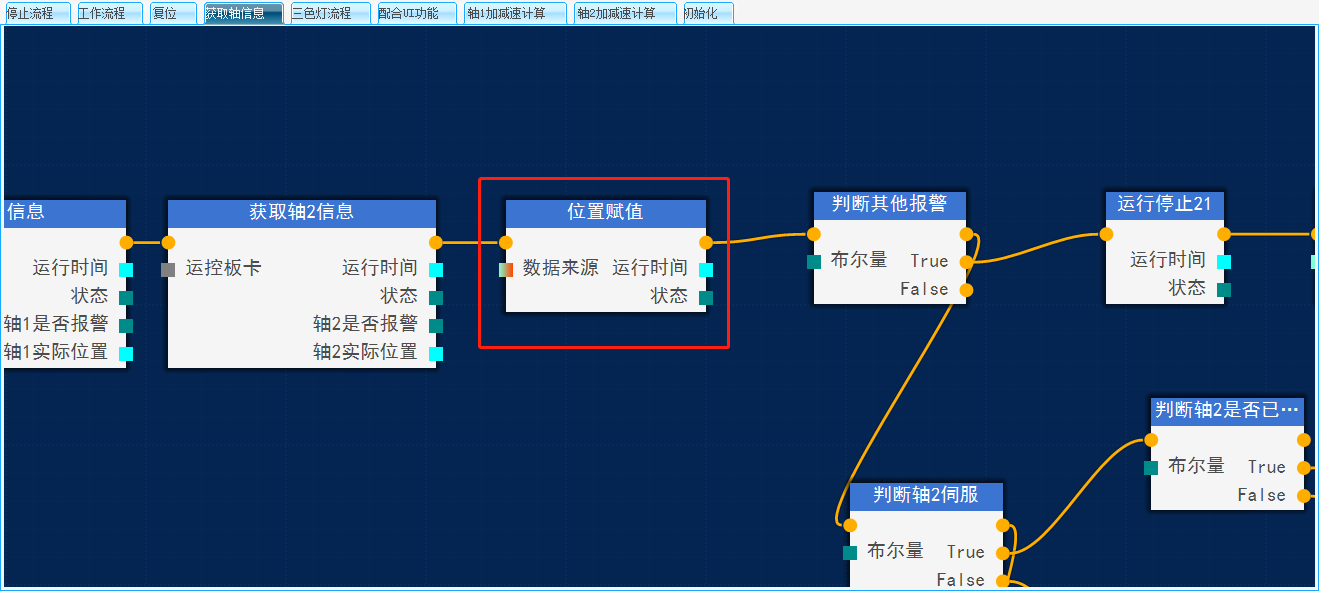
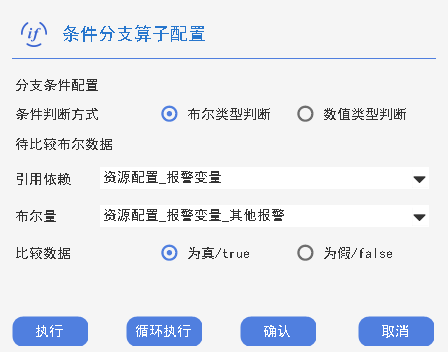
判断其他报警:通过条件分支判断其他报警变量结果,报警进行弹窗提示
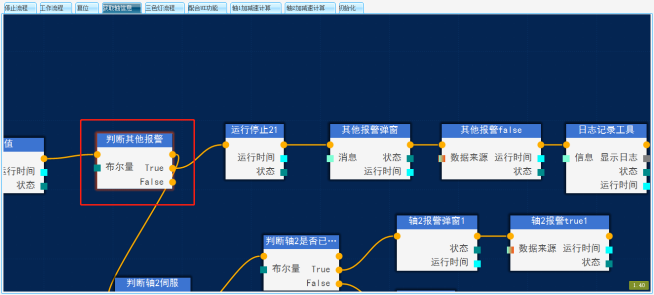
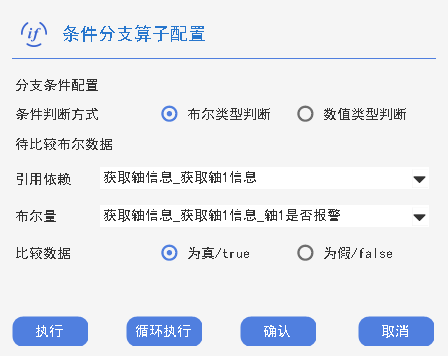
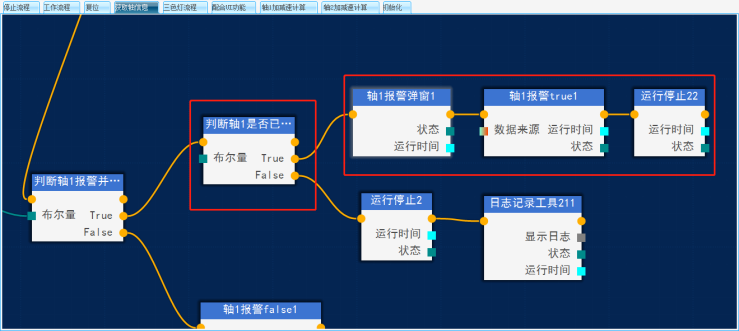
判断轴1报警:通过条件分支判断获取轴报警信息结果

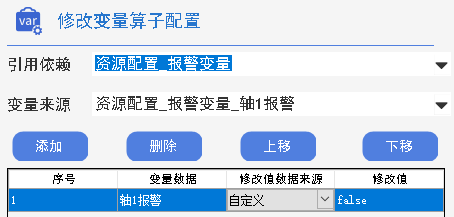
如果不存在报警了,将报警变量值复位
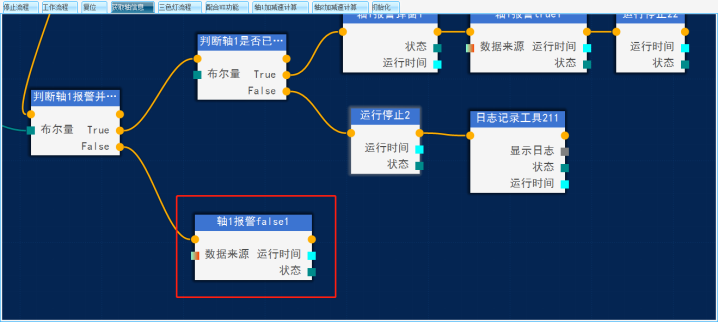
判断是否已经报过一次警:通过判断报警变量变量值确定是否是第一次报警,第一次报警进行弹窗提示并将报警变量修改,后续不再重新触发报警弹窗,只有当报警被清除一次后再次出现报警,弹出提示才会再触发

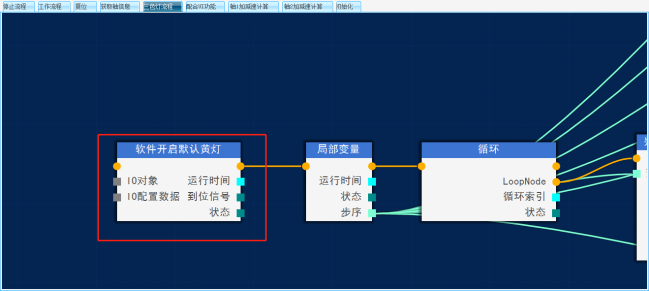
三色灯流程通过判断定义的变量值控制IO实现
例如:软件打开时默认黄色灯亮,通过气缸算子配置三色灯IO点位实现控制
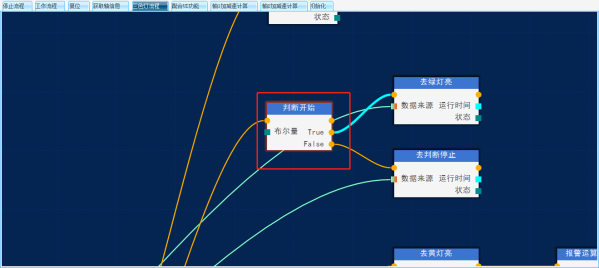
设备运行时通过条件分支判断定义开始变量结果,为true控制步序为三色灯绿亮,控制绿灯亮起
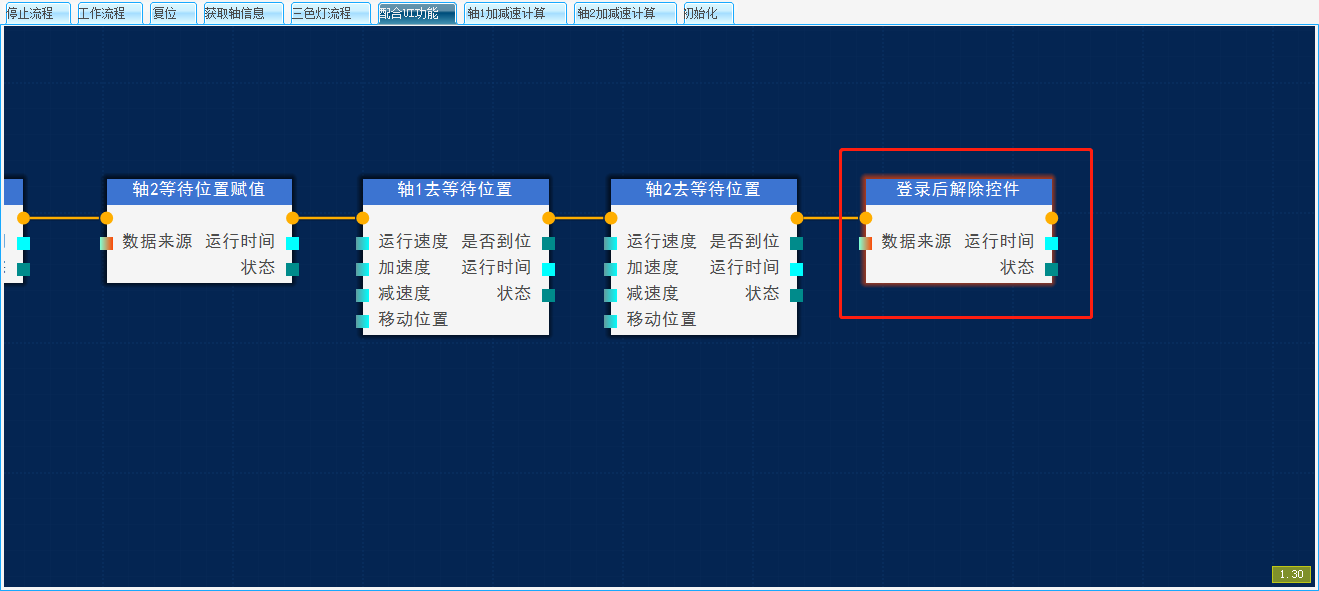
3.配合UI功能:HMI操作按钮功能实现,用于实现HMI人机交互,具体实现在HMI说明中。
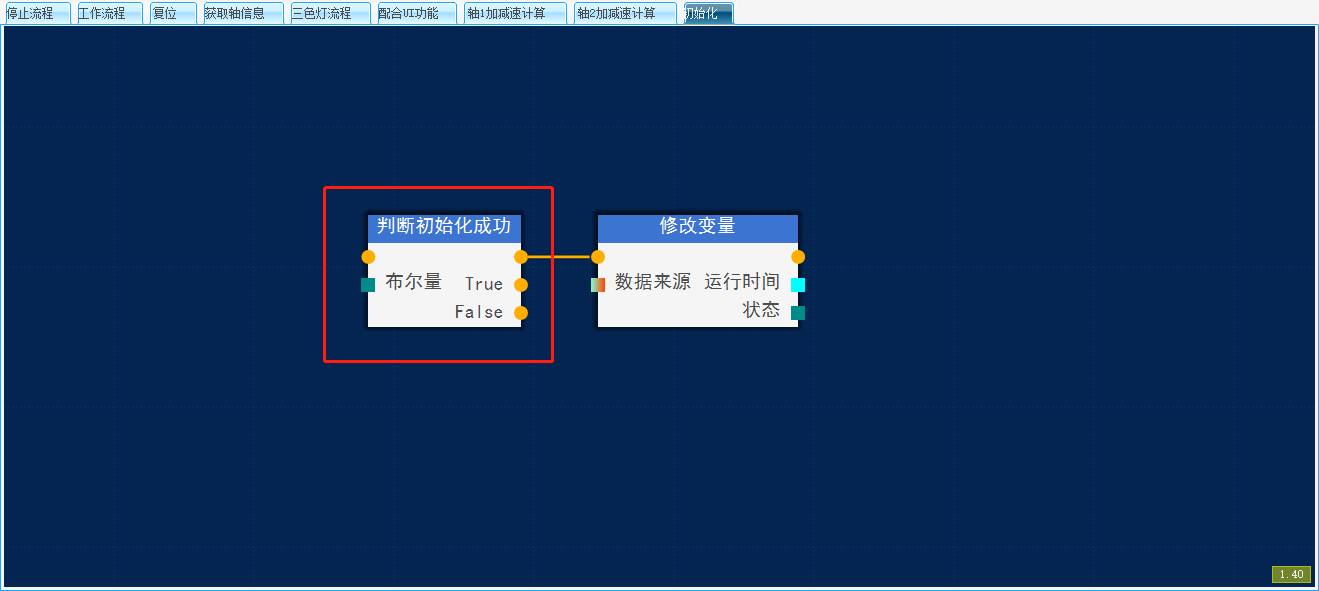
4.初始化流程:用于设备断电时重连,通过HMI提供按钮控件触发资源管理器初始化运控卡、轴对象、初始化IO等算子执行实现重新初始化,然后再执行初始化流程判断是否初始化,记录初始化结果。
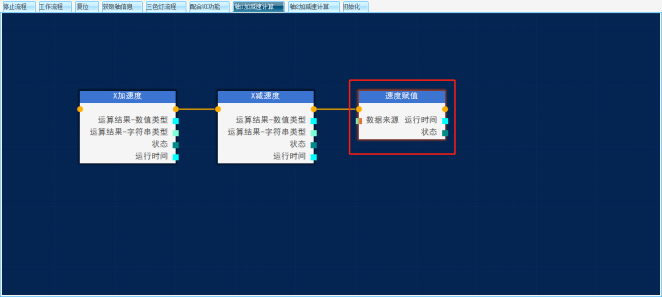
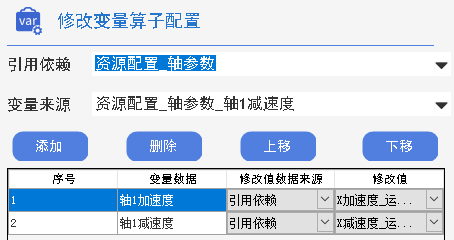
5.轴1加减速计算与轴2加减速计算:通过HMI调节速度时自动按照速度的10倍算出加减速度并给到轴参数中
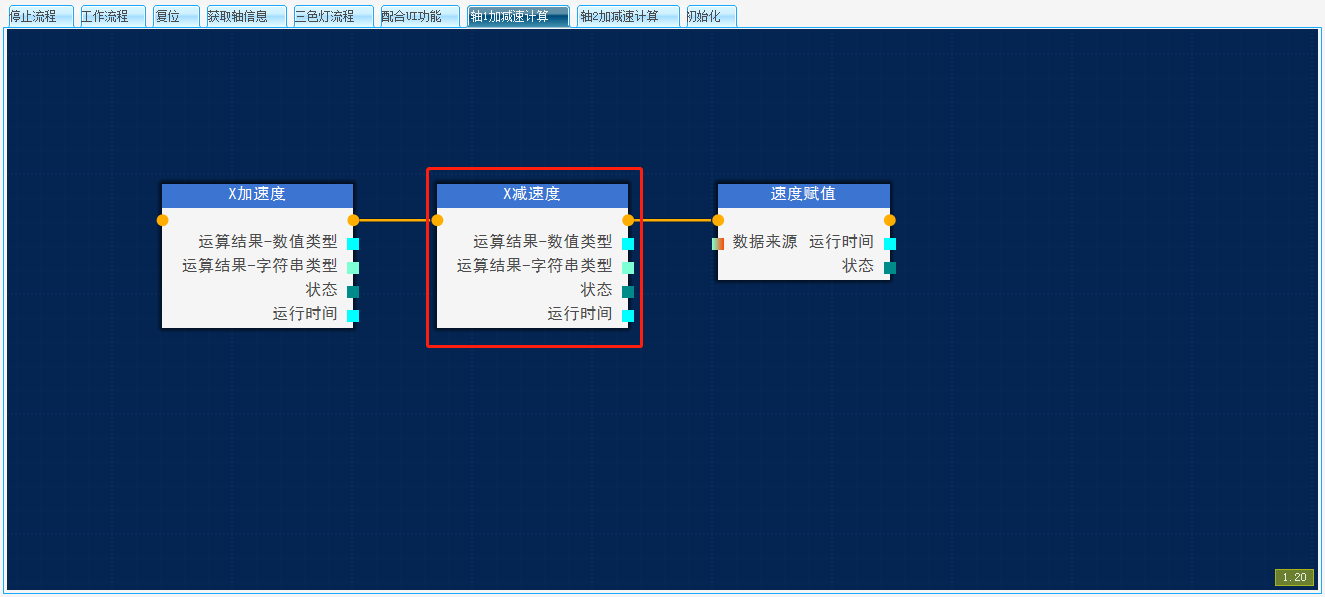
通过修改变量算子将算出的结果给到轴参数
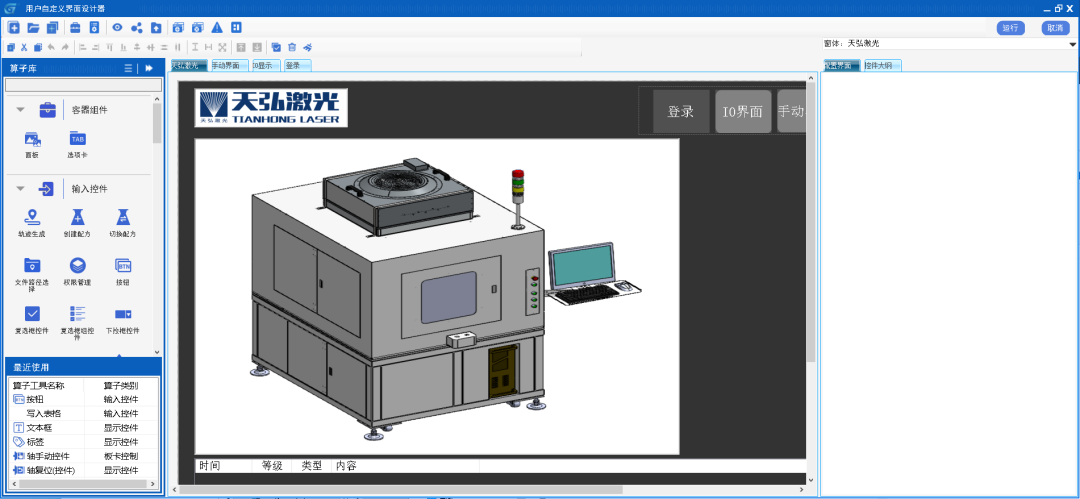
(3)HMI设计器
人机交互界面需要实现设置权限管理、设备开始、停止、复位、初始化、记录产能、记录CT、日志显示手动控制等功能,因此将界面分为权限管理、IO显示、手动控制以及主界面,HMI默认只有一个窗体,通过窗体按钮增加4个窗体,配置每个界面的背景色一致

1.权限管理:登录界面是一个单独的窗口,界面不需要制作太大,通过权限管理控件实现使用限制,配置操作员登录时可使用的界面,管理员无需做限制。
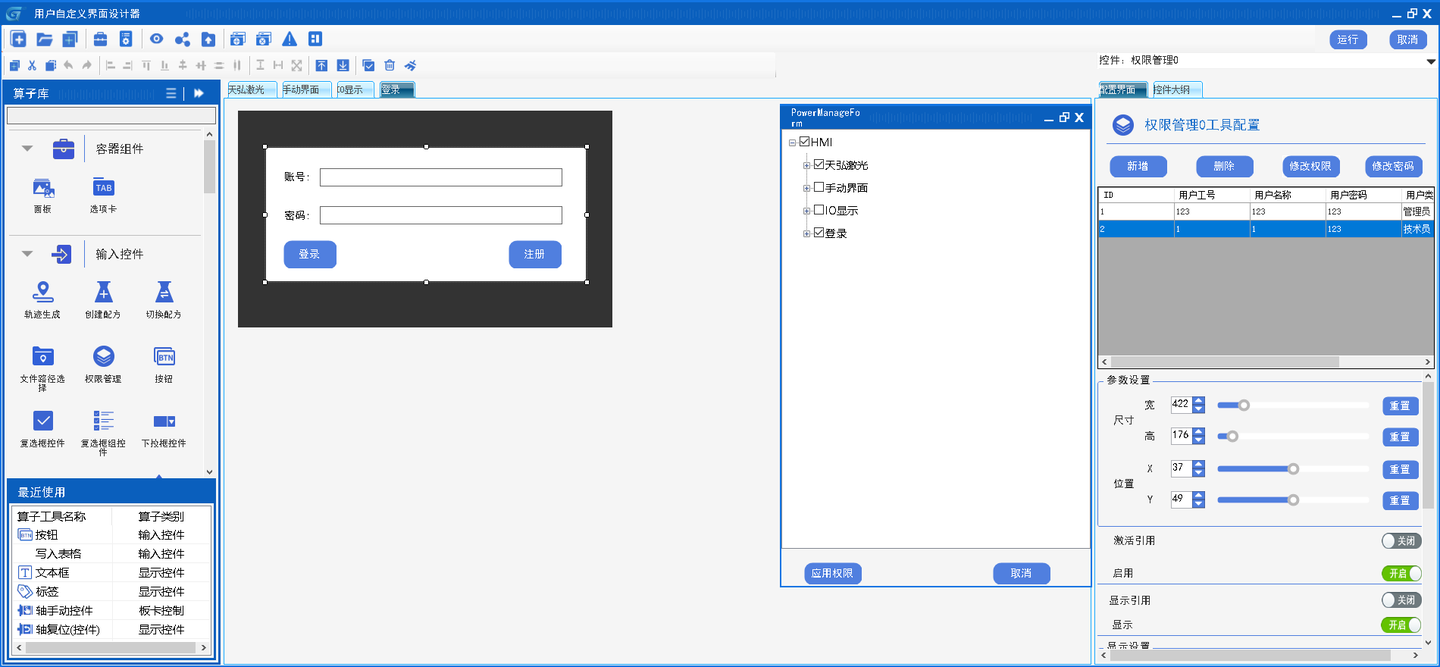
当软件初次打开时,主界面只可使用登录功能,登录成功后后即可激活其他功能,通过权限管理提供登录成功后事件实现,在主任务设计器配置UI功能中使用修改变量算子修改变量,此变量赋值为true用于控制界面功能是否可使用
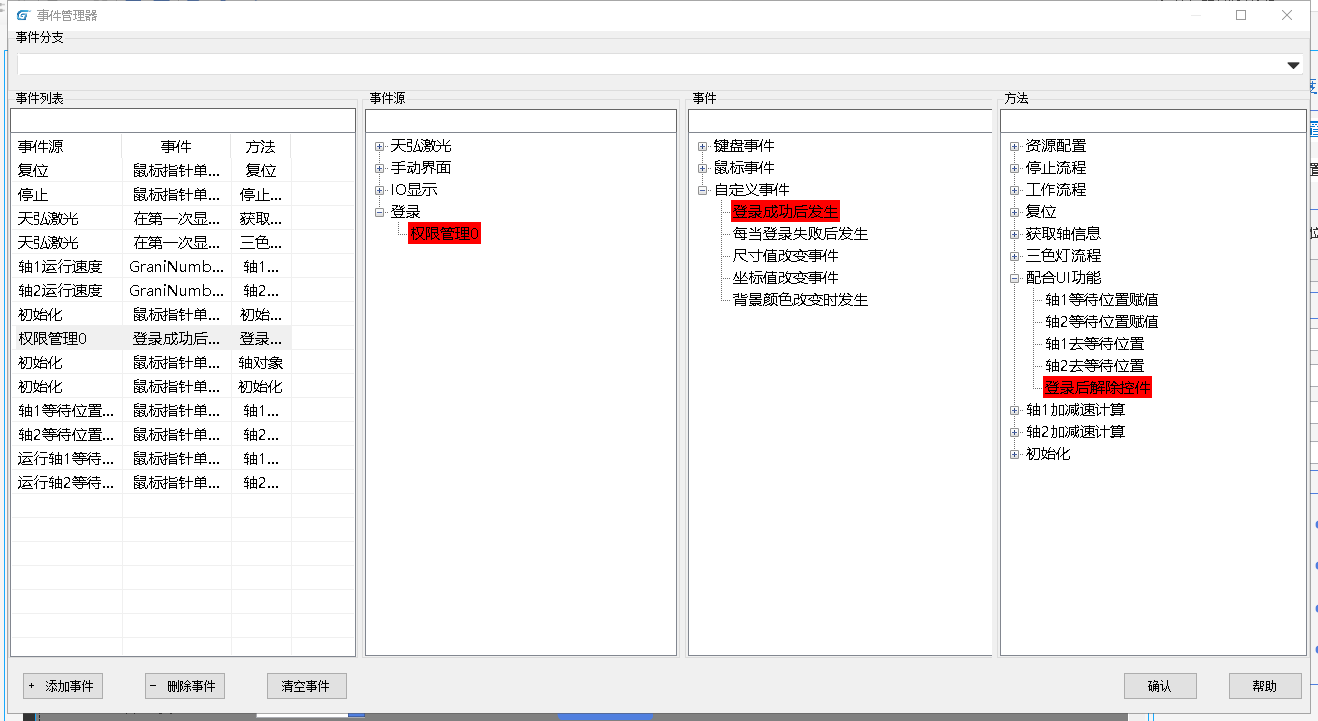
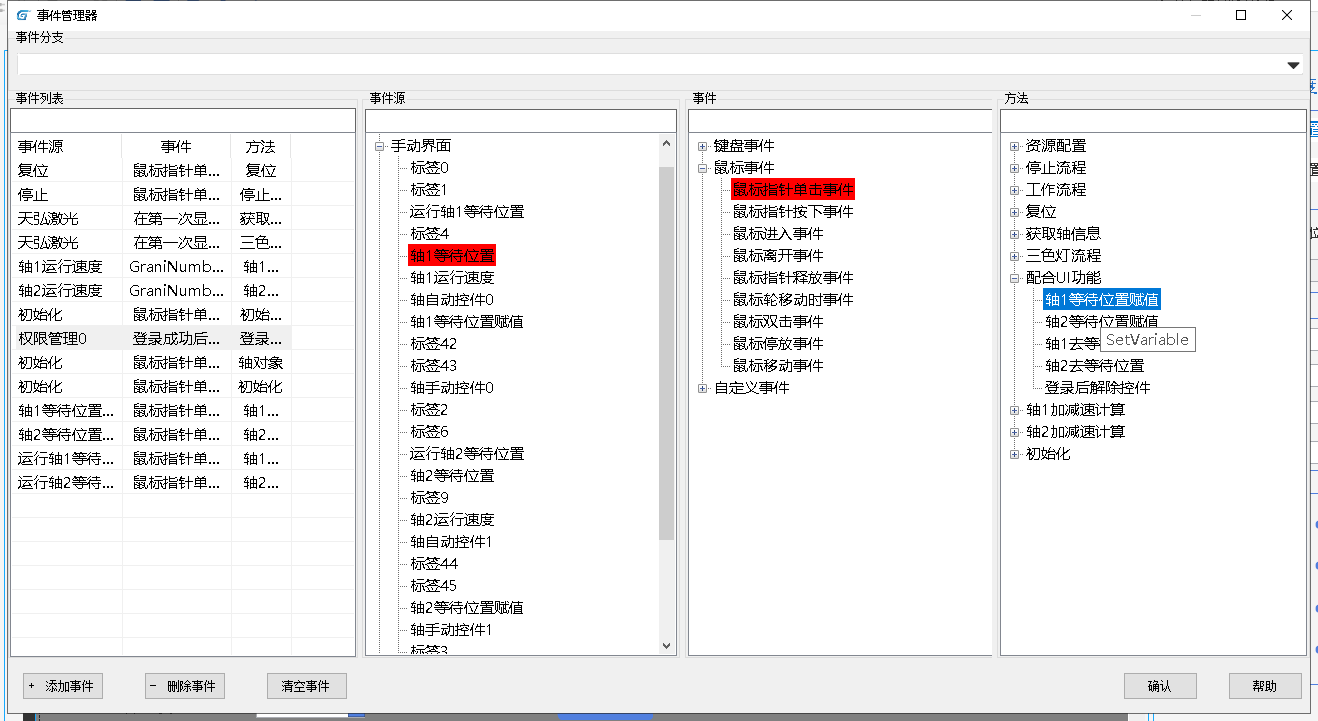
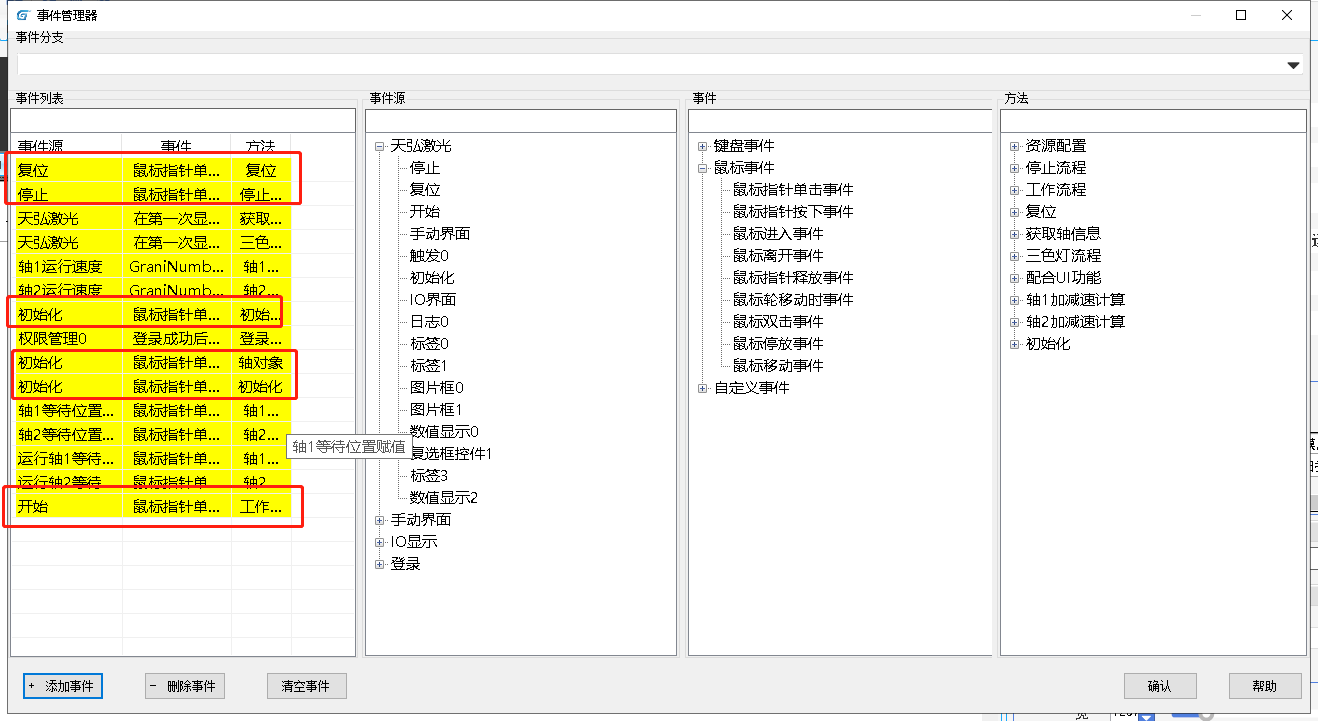
打开事件管理器
在事件源登录界面中可看到权限管理控件,其自定义事件内提供登录后发生,绑定配合UI功能流程中的登录后解除控件即可
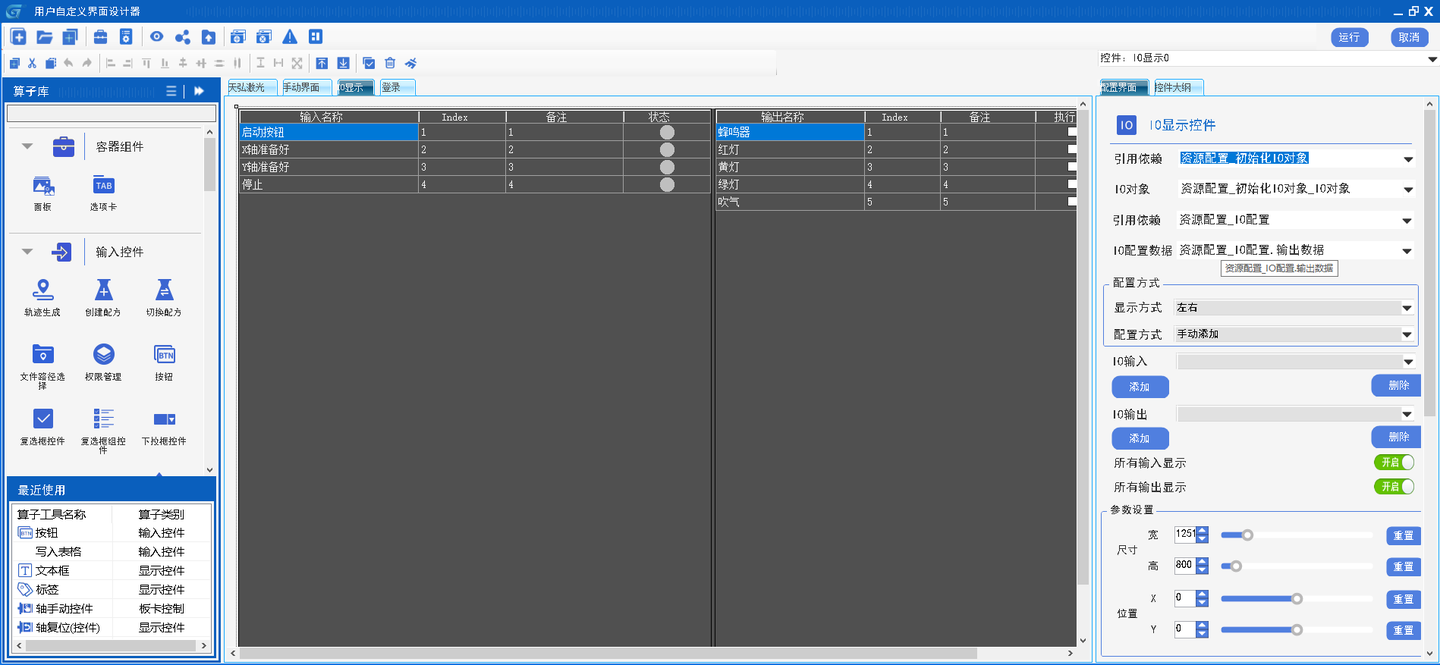
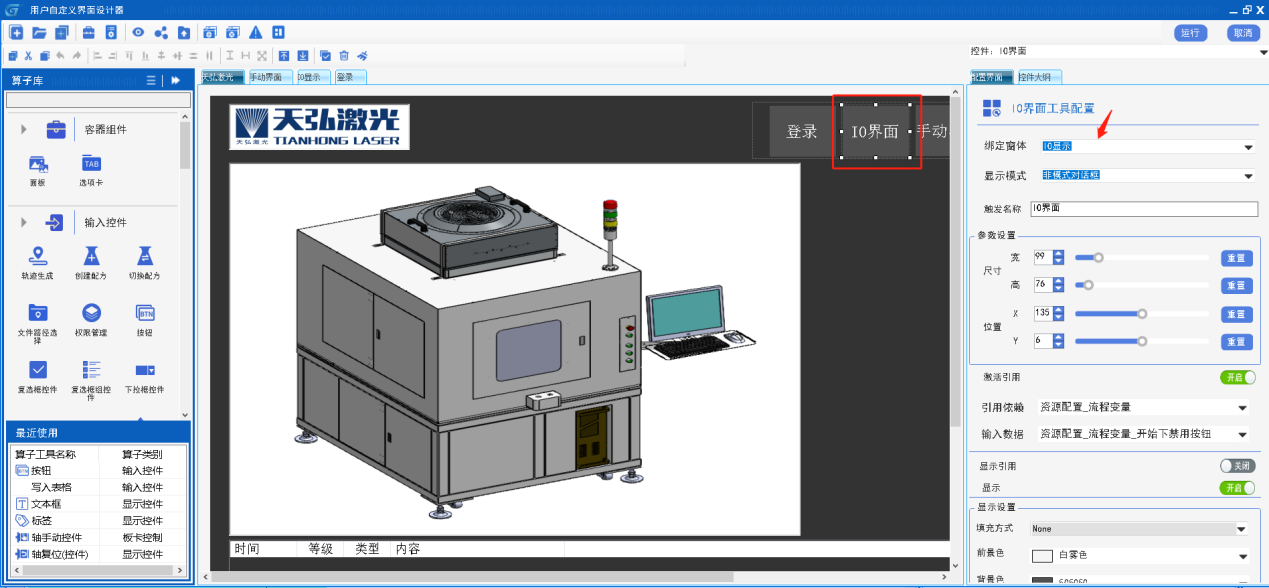
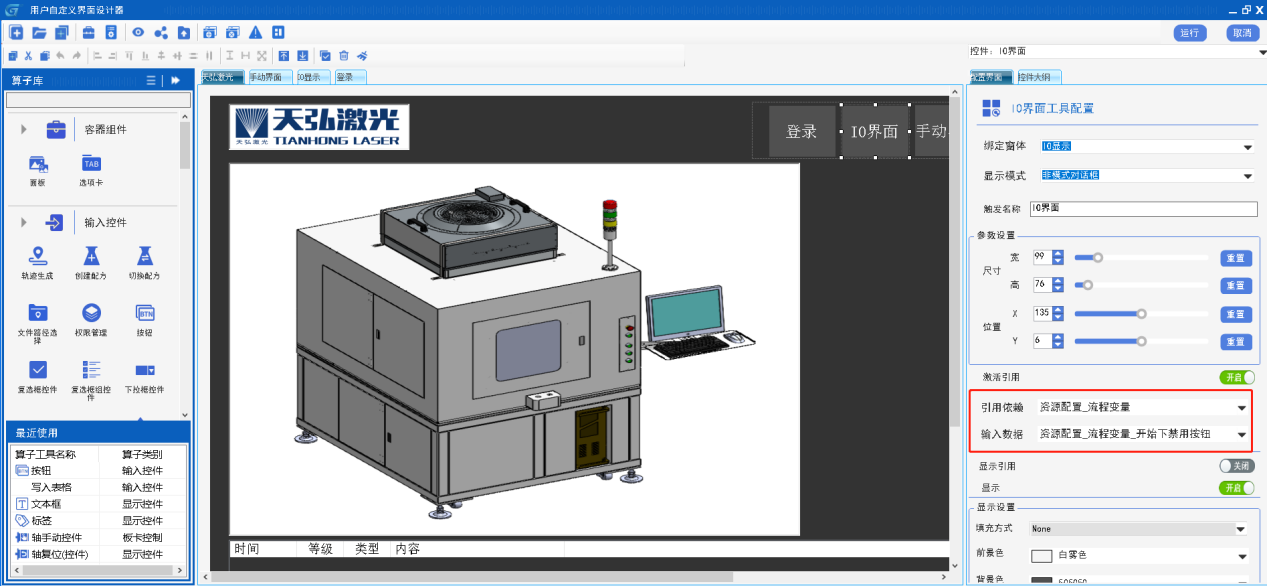
http://2.IO显示:IO界面是一个单独的窗口,在窗口上放置IO显示控件实现,打开IO显示控制配置界面,两个引用依赖分别引用初始化IO对象和IO配置数据,输入和输出都从此窗口使用,因此显示方式配置为左右,显示所有输入输出即可,HMI运行时IO显示控制自动读取IO信号并进行刷新。
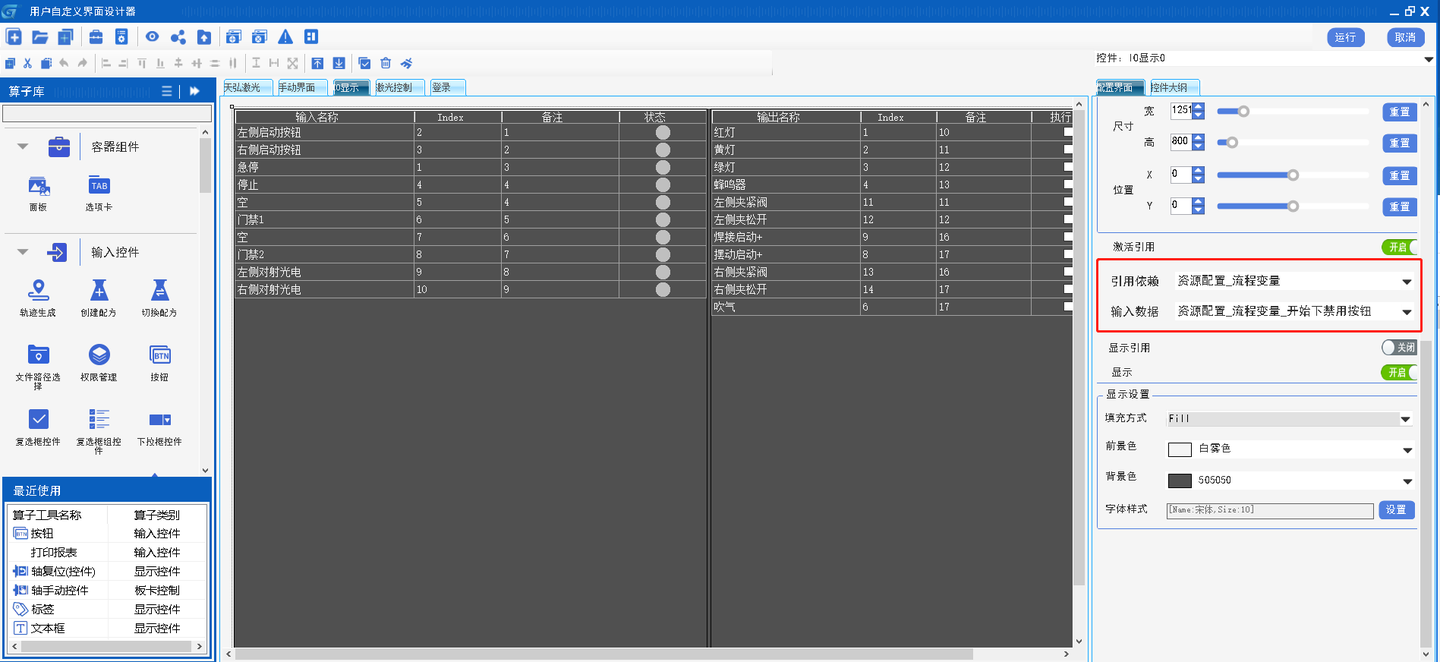
在软件使用时,为避免在设备焊接时出现使用人员误碰导致操作了IO出现异常的情况,因此给IO显示控制激光引用资源管理器流程变量中的开始下禁用按钮变量,在设备处于开始时主任务设计器算子会将此变量设置为false,控制IO显示控件无法使用。
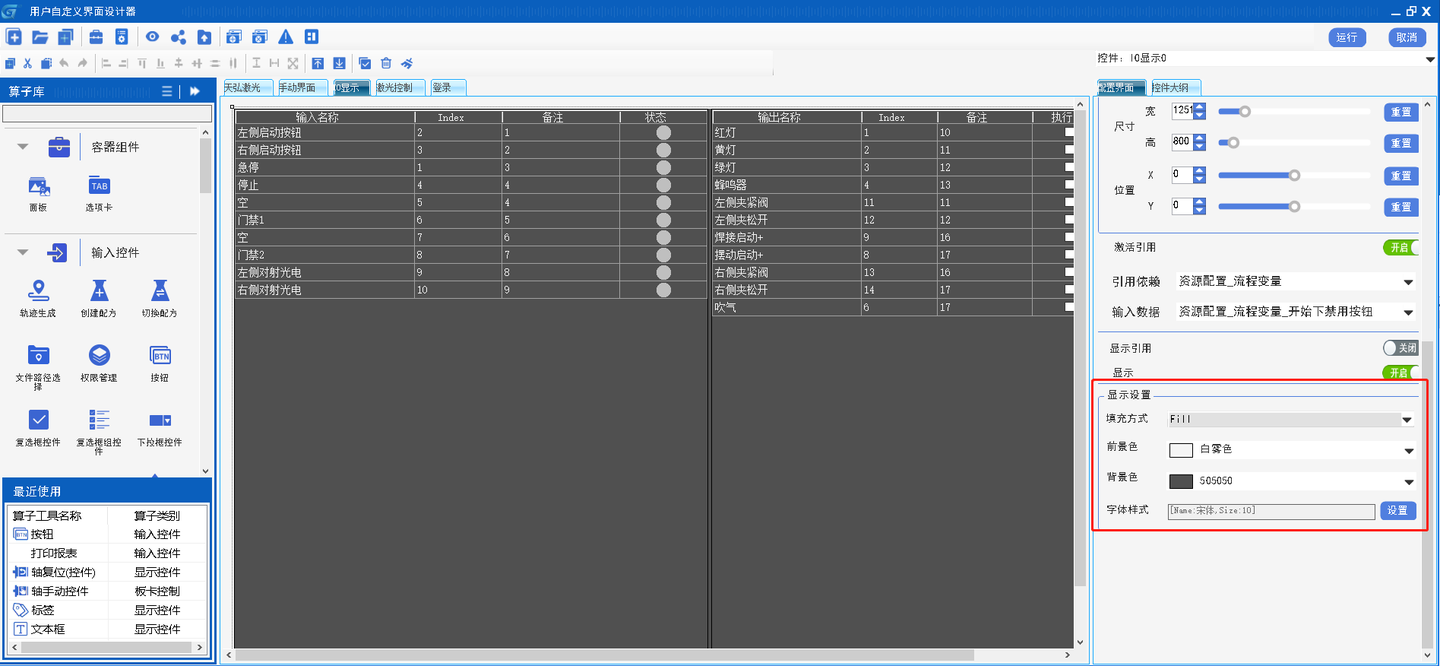
配置此窗口显示效果
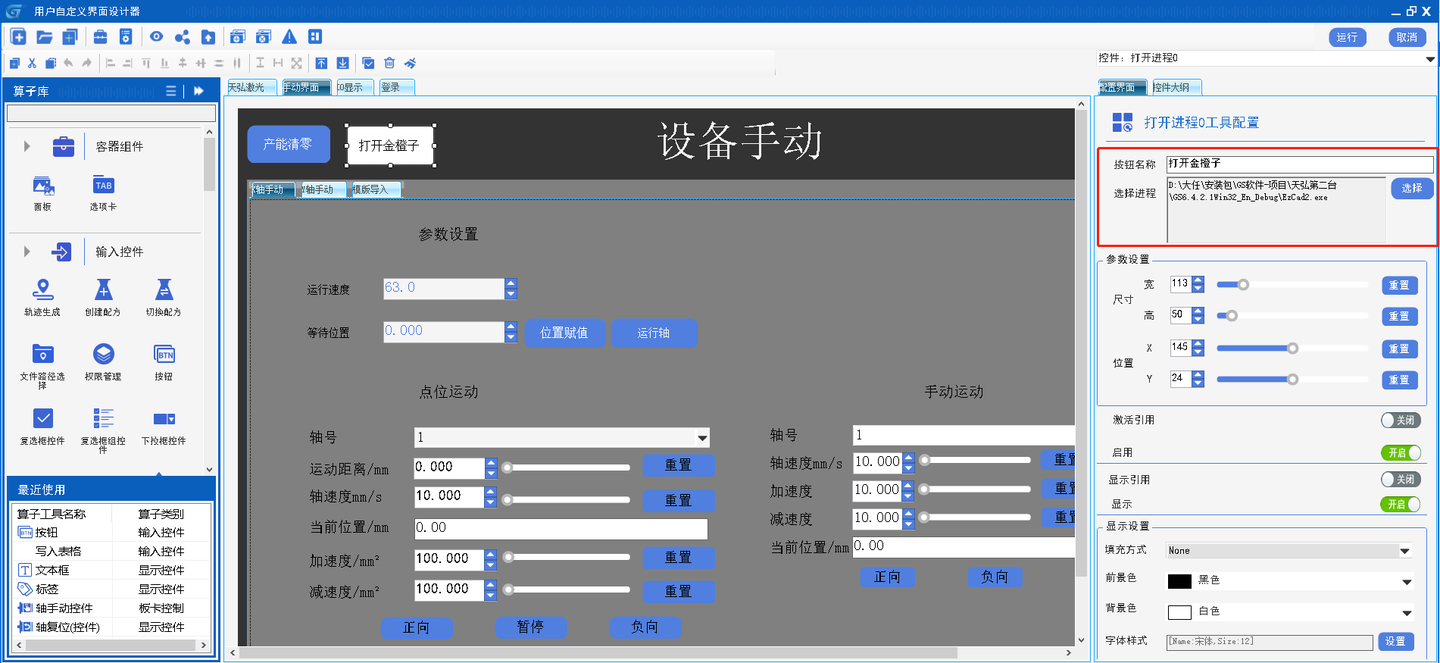
3.手动控制界面:包含手动控制轴运行、设置轴运行参数、打开金橙子打标卡等功能
打开金橙子打标卡功能通过打开进程控件实现,配置打开的金橙子软件路径,鼠标单击即可打开金橙子软件供操作人员制作切割模版
通过HMI标签控件做出功能说明,只需要编写显示文本即可,例如:

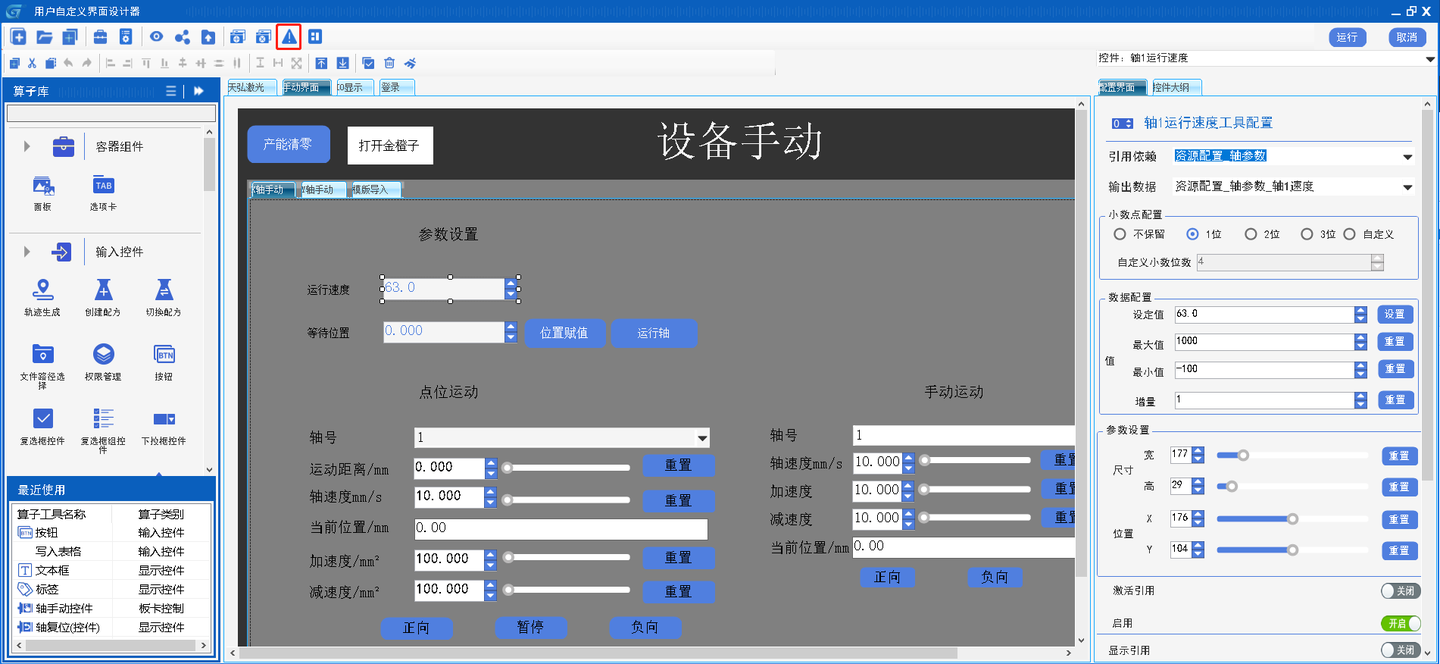
通过数值增减控件实现轴参数的传递,控件绑定资源管理器定义的轴参数变量,手动修改显示参数时同步修改到绑定变量中,实现数据交互,例如X轴运行速度:
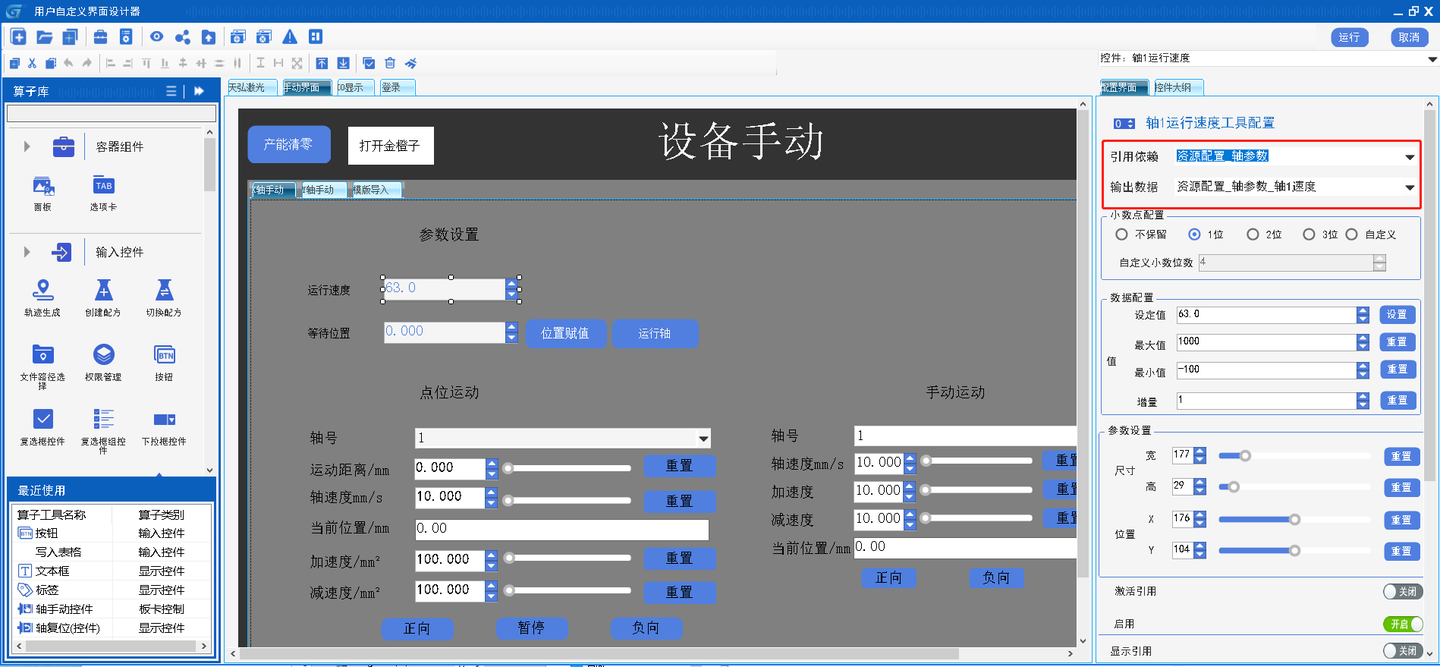
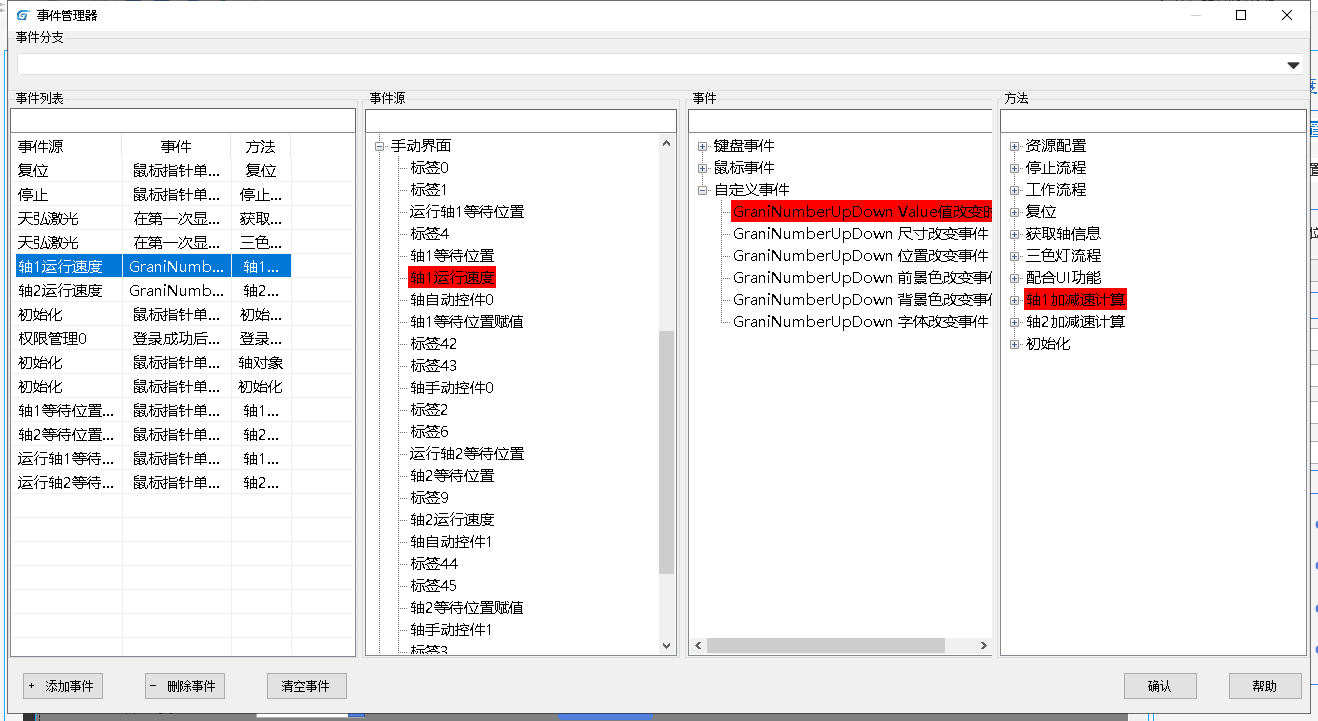
数值增减控件提供值改变事件,通过HMI事件管理器将主任务设计器流程绑定此事件实现调速的同时计算出相应加减速度,将运行速度值改变事件绑定到轴1加减速度计算,运行HMI时调速时即可触发流程执行
手动控制界面中位置赋值功能是实现将轴当前位置给到变量中,获取轴信息流程将获取的轴位置给到资源管理器,在主任务设计器已经设计了通过修改变量将实际位置给到对应轴参数,如下图:
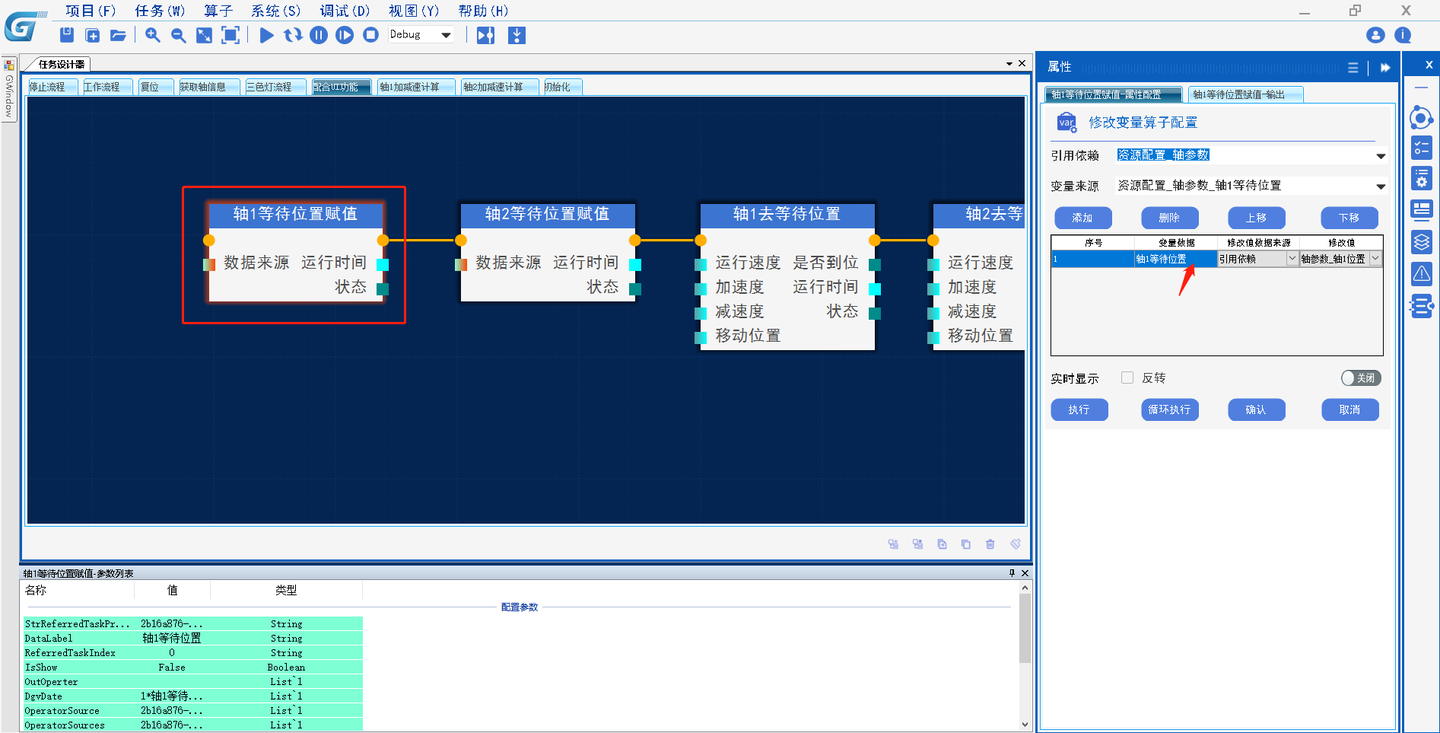
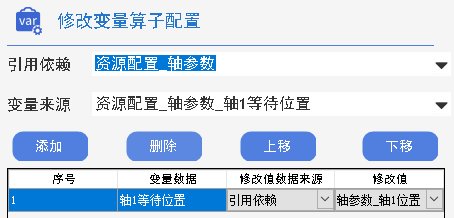
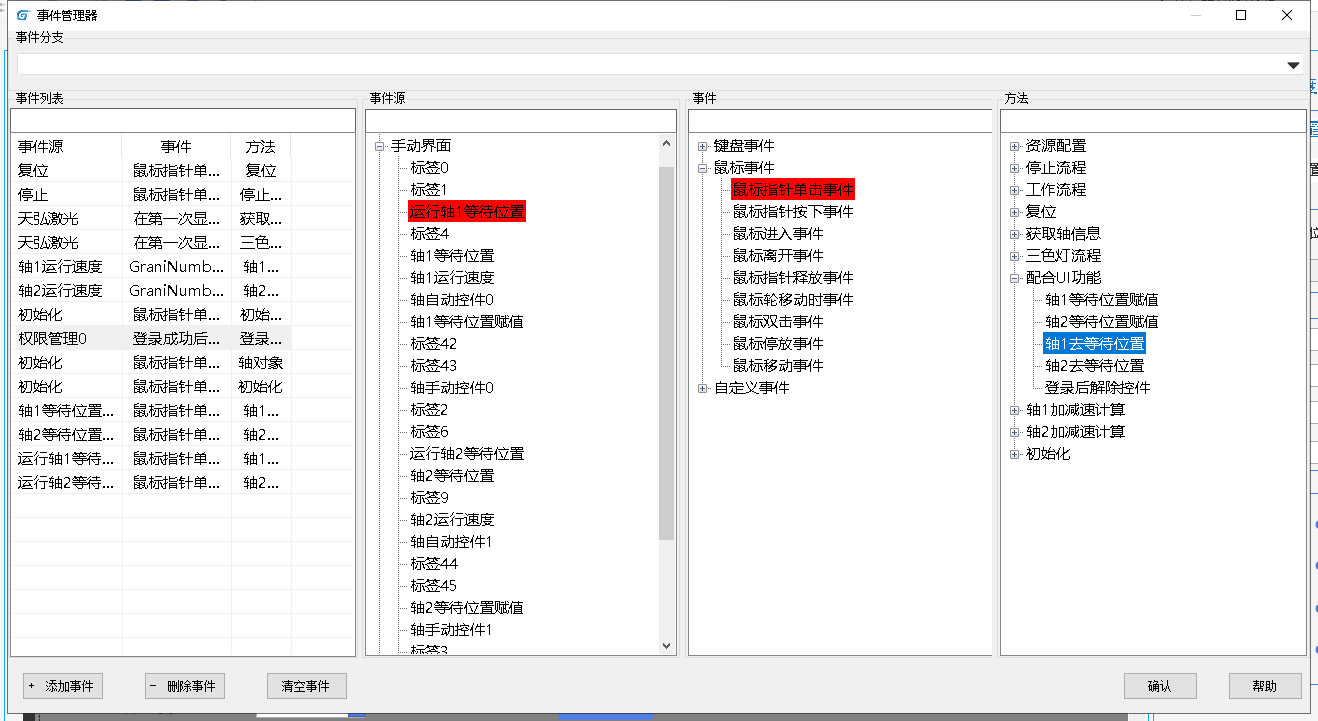
将X轴手动界面内的位置赋值按钮单击事件绑定到算子,运行HMI时单击此按钮即可触发算子执行,实现将轴实际位置赋值给对应参数功能, 赋值后X轴等待位置数值显示控件会自动更新。
点位测试:运行轴按钮同样将单击事件绑定到算子,实现运行测试。
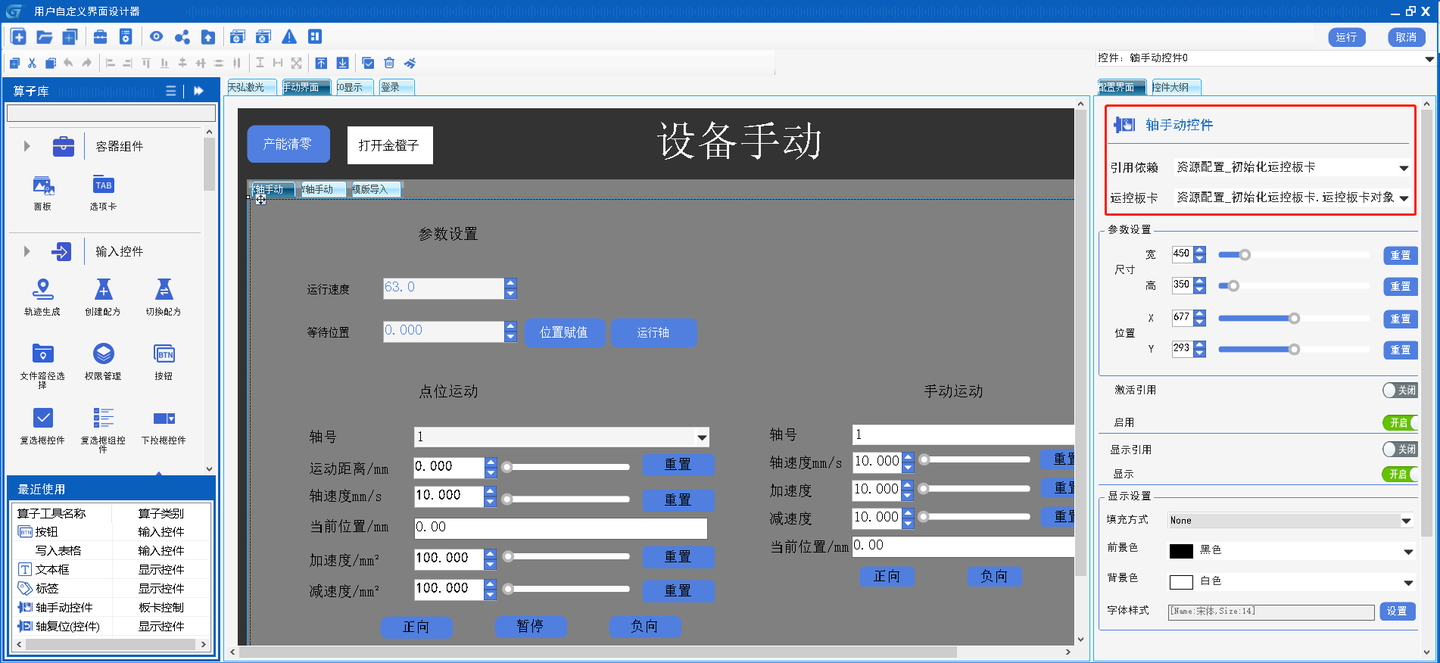
手动点位控制:通过轴自动控件实现点位控制,引用依赖引用初始化运控板卡,客户要求点位控制只做相对运动,因此配置相对运动

手动连续运动控制:通过轴手动控件实现连续运动,引用依赖引用初始化运控板卡
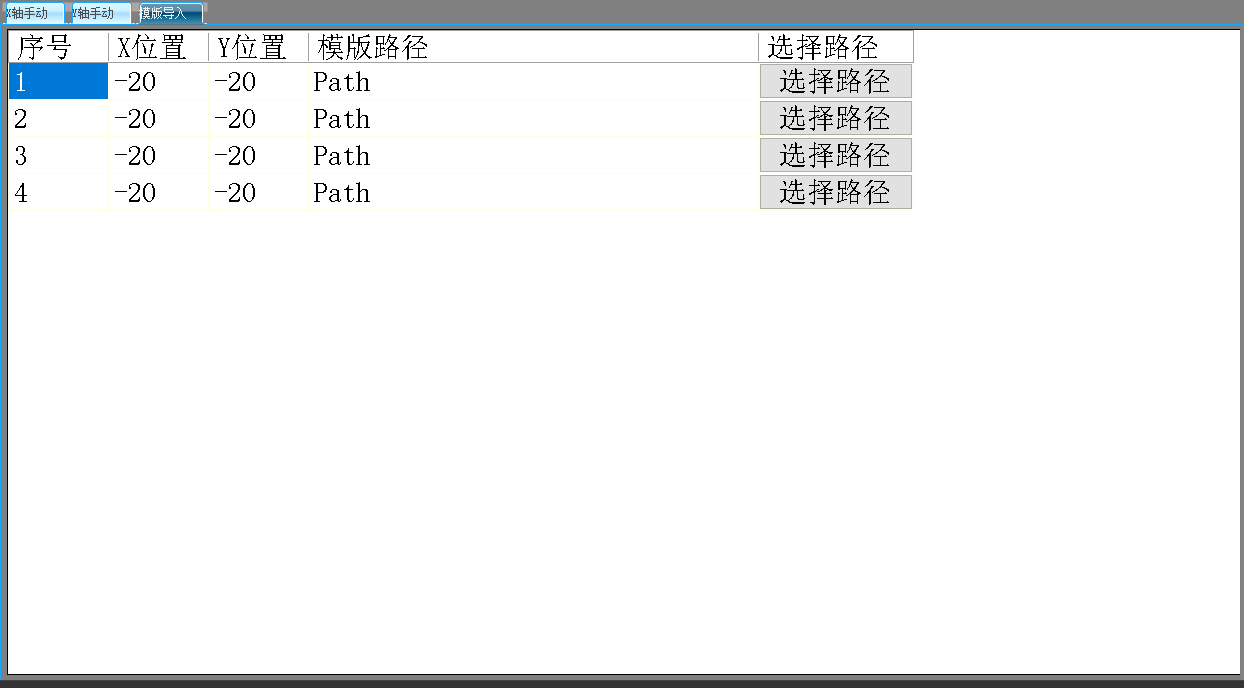
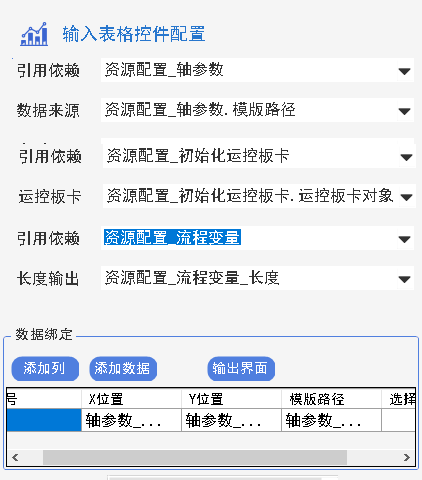
XY轴工作位置通过模版导入界面中的表格实现
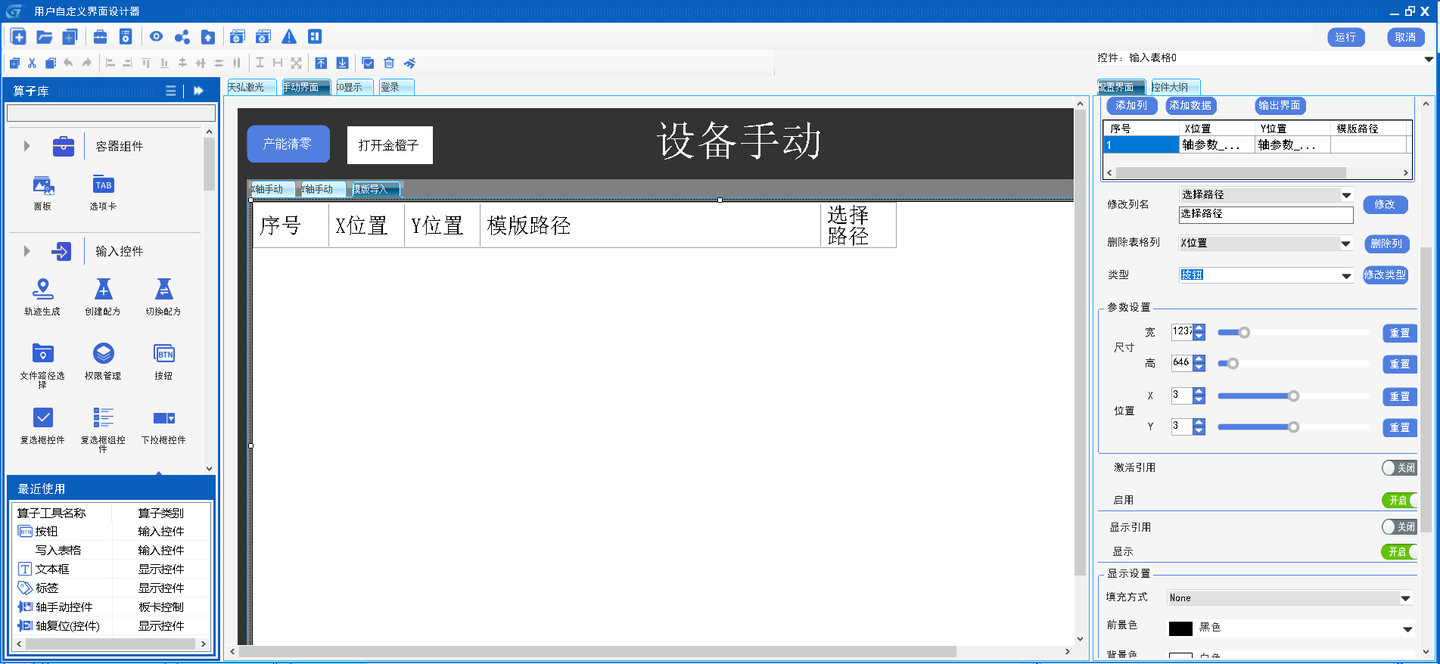
表格X位置列绑定流程变量中的轴1工作位置变量,Y位置列绑定轴2工作位置变量,模版路径绑定模版流程变量,列数据以数组格式对变量进行赋值,同时行数变化会将行数存储到长度变量中
4.主界面:设备开始、停止、复位、初始化功能通过按钮控件单击事件触发对应流程实现功能
在主界面通过触发控件实现打开IO显示、手动控制、登录等界面,每个触发按钮绑定一个窗口即可实现,例如IO显示触发控件绑定IO显示窗口:
当使用人员初次打开界面时,通过变量控制上述按钮和触发控件是否可使用,实现初次使用必须登录功能,如下图:
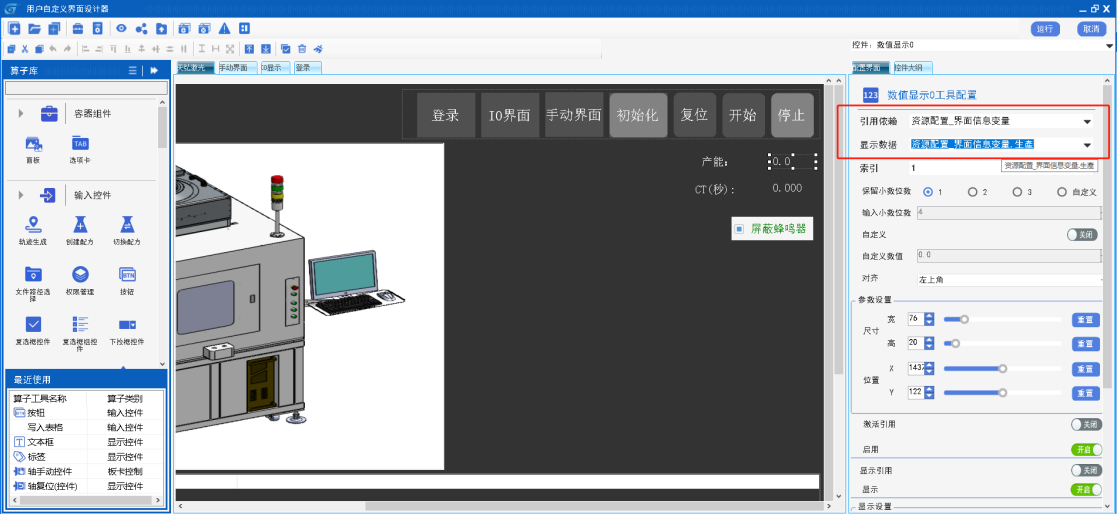
记录CT和产能功能通过数值显示控件显示,如下图:
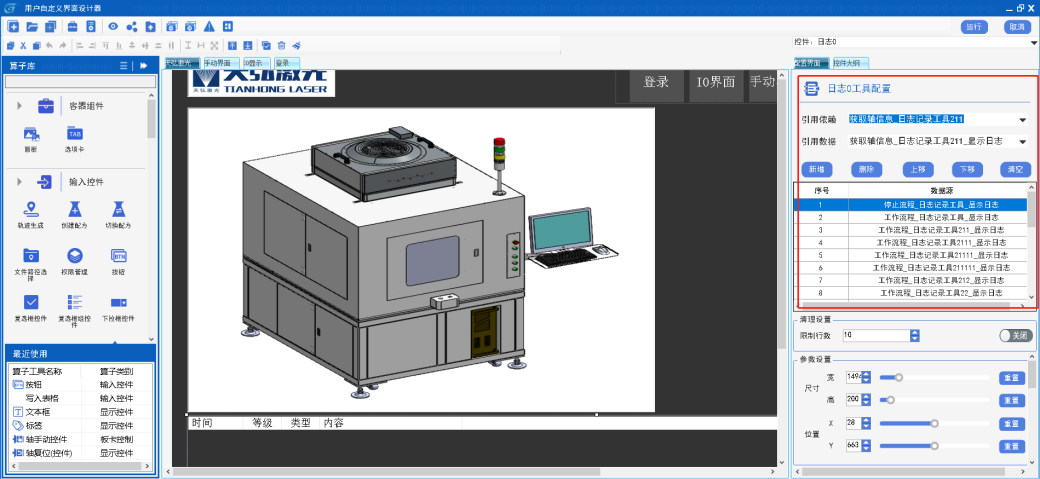
通过日志显示控件显示日志,配置需显示的日志,如下图:
案例程序可通过GraniStudio官网获取

















 1724
1724

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









