




 本文详细介绍了在ROS中如何自定义话题消息,包括定义msg文件、添加依赖和编译选项。同时,展示了如何创建发布者和订阅者节点,实现消息的发布与接收。通过示例代码person_publisher.cpp和person_subscriber.cpp阐述了节点初始化、话题注册、消息处理等步骤。最后,讨论了ROS Master在发布订阅中的作用,指出其主要负责节点间的连接建立,一旦连接成功,即使关闭Master,消息传递仍能继续。
本文详细介绍了在ROS中如何自定义话题消息,包括定义msg文件、添加依赖和编译选项。同时,展示了如何创建发布者和订阅者节点,实现消息的发布与接收。通过示例代码person_publisher.cpp和person_subscriber.cpp阐述了节点初始化、话题注册、消息处理等步骤。最后,讨论了ROS Master在发布订阅中的作用,指出其主要负责节点间的连接建立,一旦连接成功,即使关闭Master,消息传递仍能继续。
如何自定义话题消息:
- 定义msg文件;
//Person.msg
string name
uint8 sex
uint8 age
uint8 unknown=0
uint8 male =1
uint8 female =2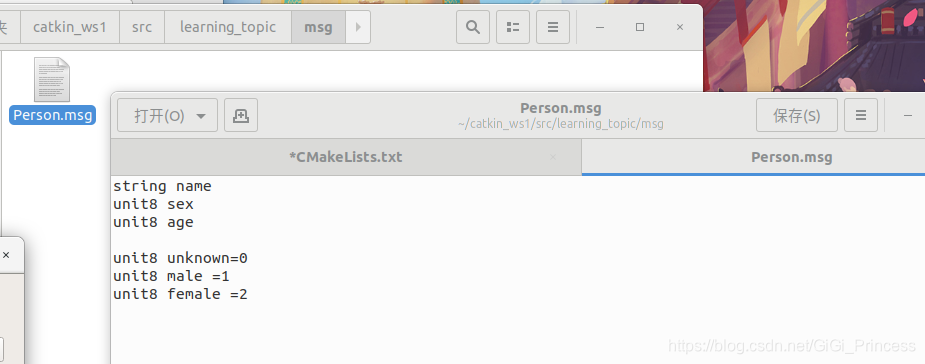
- 在package.xml中添加功能包依赖
<build_depend>message_generation</build_depend>
<exec_depend>message_runtime</exec_depend>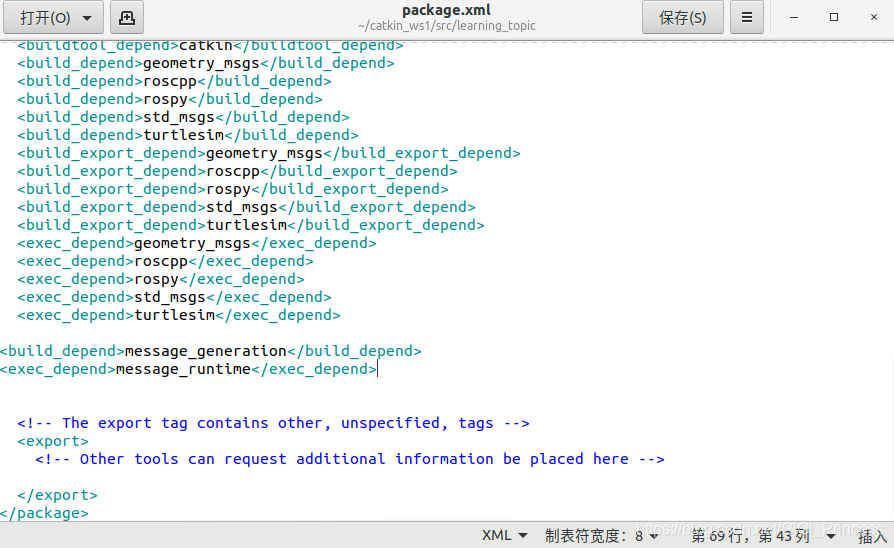
- 在CMakeLists.txt添加编译选项
find_package(...... message_generation)
add_message_files(FILES Person.msg)
generate_messages(DEPENDENCIES std_msgs)
catkin_package(...... message_runtime)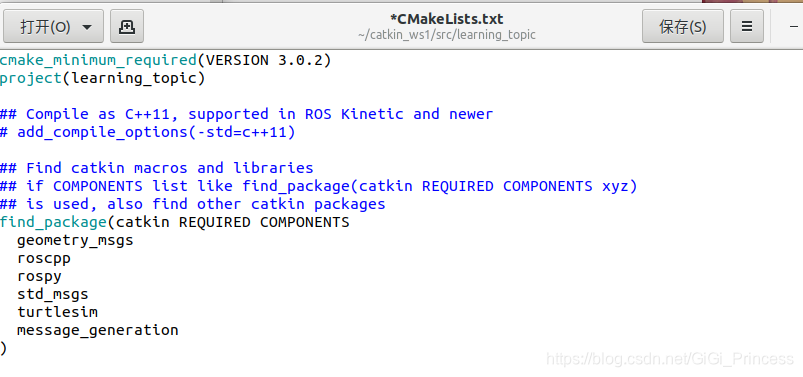
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 396
396

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









