




 本文深入探讨了深度学习中常用的归一化方法,包括BatchNormalization、LayerNormalization、InstanceNormalization和GroupNormalization,对比了它们在不同场景下的优劣,特别强调了各自的适用范围和计算流程。
本文深入探讨了深度学习中常用的归一化方法,包括BatchNormalization、LayerNormalization、InstanceNormalization和GroupNormalization,对比了它们在不同场景下的优劣,特别强调了各自的适用范围和计算流程。
不同的Normalization方法的比较
深度学习中常用的Normalization方法有Batch Normalization(BN,2015)、Layer Normalization(LN,2016)、Instance Normalization(IN,2017)、Group Normalization(GN,2018)。
不同的Normalization层的输入为特征图(Feature Map),通常记为[N,C,H,W],:
- N:批次大小
- C:通道数
- H:高度
- W:宽度
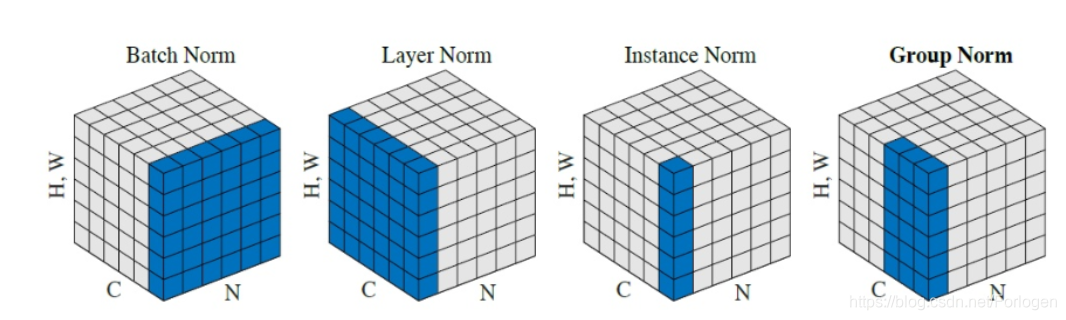
不同的方法的区别可简单的归结为:
- BN是在batch上,对N、H、W做归一化,而保留通道 C 的维度。BN对较小的batch size效果不好。BN适用于固定深度的前向神经网络,如CNN,不适用于RNN
- LN在通道方向上,对C、H、W归一化,主要对RNN效果明显
- IN在图像像素上,对H、W做归一化,用在风格化迁移
- GN将channel分组,然后再做归一化
形象化的表述:如果把特征图 x ∈ R N × C × H × W x \in R^{N \times C \times H \times W} x∈RN×C×H×W 比喻成一摞书,这摞书总共有 N 本,每本有 C 页,每页有 H 行,每行 有W 个字符。
- BN 求均值时,相当于把这些书按页码一一对应地加起来(例如第1本书第36页,第2本书第36页…),再除以每个页码下的字符总数:N×H×W,因此可以把 BN 看成求“平均书”的操作(注意这个“平均书”每页只有一个字),求标准差时也是同理。
- LN 求均值时,相当于把每一本书的所有字加起来,再除以这本书的字符总数:C×H×W,即求整本书的“平均字”,求标准差时也是同理。
- IN 求均值时,相当于把一页书中所有字加起来,再除以该页的总字数:H×W,即求每页书的“平均字”,求标准差时也是同理。
- GN 相当于把一本 C 页的书平均分成 G 份,每份成为有 C/G 页的小册子,求每个小册子的“平均字”和字的“标准差”。
Batch Normalization
BN解决的问题:
- 在深度神经网络中使用mini-batch SGD进行训练时,由于不同的批次的数据所满足的分布可能是不同的,导致模型的训练极其困难;
- Internal Covariate Shift,ICS问题:训练过程中,激活函数会改变各层数据的分布,随着网络的加深,这种改变会越来越明显,是的模型训练困难,收敛速度下降,甚至出现梯度消失的问题
BN的主要思想在于:对于每一个神经元来说,在数据进入激活函数前,沿着通道计算每个批次的均值和方差,使得每一批次的数据服从均值为0、方差为1的正态分布。
BN计算过程:
-
沿着通道计算每个批次的均值 μ \mu μ: μ = 1 m ∑ i = 1 m z ( i ) \mu=\frac{1}{m}\sum_{i=1}^m z^{(i)} μ=m1∑i=1mz(i)
-
沿着通道计算每个批次的方查 σ \sigma σ: σ 2 = 1 m ∑ i = 1 m ( z ( i ) − μ ) 2 \sigma^2=\frac{1}{m}\sum_{i=1}^m (z^{(i)}-\mu)^2 σ2=m1∑i=1m(z(i)−μ)2
-
归一化: z N o r m ( i ) = z ( i ) − μ σ 2 + ϵ z_{Norm}^{(i)}=\frac{z^{(i)-\mu}}{\sqrt{\sigma^2 + \epsilon}} zNorm(i)=σ2+ϵz(i)−μ
-
加入缩放和平移量 γ \gamma γ和 β \beta β: z ~ ( i ) = γ z N o r m ( i ) + β \tilde{z}^{(i)}=\gamma z_{Norm}^{(i)} +\beta z~(i)=γzNorm(i)+β
BN优点:
-
允许较大的学习率;
-
减弱对初始化的强依赖性
-
保持隐藏层中数值的均值、方差不变,让数值更稳定,为后面网络提供坚实的基础;
-
有轻微的正则化作用
BN不足:
- 如果批次太小,计算的均值和方差不足以代表整个数据分布
- 如果批次太大,可能会超过内存容量,导致训练时间变长
Layer Normalization
LN对所有神经元的输入进行正则化操作,对于特征图来
x
∈
R
N
×
C
×
H
×
W
x \in R^{N \times C \times H \times W}
x∈RN×C×H×W来说,LN对每个样本的
C
、
H
、
W
C、H、W
C、H、W维度上的数据求均值和标准差,保留
N
N
N维度。
μ
n
(
x
)
=
1
C
H
W
∑
c
=
1
C
∑
h
=
1
H
∑
w
=
1
W
x
n
c
h
w
σ
n
(
x
)
=
1
C
H
W
∑
c
=
1
C
∑
h
=
1
H
∑
w
=
1
W
(
x
n
c
h
w
−
μ
n
(
x
)
)
2
+
ϵ
\mu_{n}(x)=\frac{1}{CHW}\sum_{c=1}^C \sum_{h=1}^H \sum_{w=1}^W x_{nchw} \\ \sigma_{n}(x)=\sqrt{\frac{1}{CHW}\sum_{c=1}^C \sum_{h=1}^H \sum_{w=1}^W ( x_{nchw}-\mu_{n}(x))^2 + \epsilon }
μn(x)=CHW1c=1∑Ch=1∑Hw=1∑Wxnchwσn(x)=CHW1c=1∑Ch=1∑Hw=1∑W(xnchw−μn(x))2+ϵ
LN的优点在于不需要批训练,在单条数据内部就可以归一化,在RNN上效果明显,但在CNN上不如BN。
Instance Normalization
IN最初用于图像风格化,只对
H
、
W
H、W
H、W做归一化,加速模型收敛,并保持每个图像实例之间的独立。对于对于特征图来
x
∈
R
N
×
C
×
H
×
W
x \in R^{N \times C \times H \times W}
x∈RN×C×H×W来说,IN对每个样本的
H
、
W
H、W
H、W维度的数据求均值和标准差,保留
N
、
C
N、C
N、C维度,即只在channel内部求均值和标准差。
y
t
i
j
k
=
x
t
i
j
k
−
μ
t
i
σ
t
i
2
+
ϵ
μ
t
i
=
1
H
W
∑
l
=
1
W
∑
m
=
1
H
x
t
i
l
m
σ
t
i
2
=
1
H
W
∑
l
=
1
W
∑
m
=
1
H
(
x
t
i
l
m
−
m
u
t
i
)
2
y_{tijk}=\frac{x_{tijk}-\mu_{ti}}{\sqrt{\sigma_{ti}^2}+\epsilon} \\ \mu_{ti}=\frac{1}{HW}\sum_{l=1}^W \sum_{m=1}^H x_{tilm} \\ \sigma_{ti}^2=\frac{1}{HW}\sum_{l=1}^W \sum_{m=1}^H (x_{tilm}-mu_{ti})^2
ytijk=σti2+ϵxtijk−μtiμti=HW1l=1∑Wm=1∑Hxtilmσti2=HW1l=1∑Wm=1∑H(xtilm−muti)2
Group Normalization
GN是为了解决BN对较小的批次效果差的问题,它适用于占用显存比较大的任务,GN独立于批次大小,它是LN和IN的折中。
GN的主要思想是把每一个样本的feature map的channel分为G组,每组有C/G个channel,然后对这些channel中的元素求均值和标准差,各组channel勇气对应的归一化参数独立地归一化。
μ
n
g
(
x
)
=
1
(
C
/
G
)
H
W
∑
c
=
g
C
/
G
(
g
+
1
)
C
/
G
∑
h
=
1
H
∑
w
=
1
W
x
n
c
h
w
σ
n
g
(
x
)
=
1
(
C
/
G
)
H
W
∑
c
=
g
C
/
G
(
g
+
1
)
C
/
G
∑
h
=
1
H
∑
w
=
1
W
(
x
n
c
h
w
−
μ
n
g
(
x
)
)
2
+
ϵ
\mu_{ng}(x)=\frac{1}{(C/G)HW}\sum_{c=gC/G}^{(g+1)C/G} \sum_{h=1}^H \sum_{w=1}^W x_{nchw} \\ \sigma_{ng}(x)=\sqrt{\frac{1}{(C/G)HW}\sum_{c=gC/G}^{(g+1)C/G} \sum_{h=1}^H \sum_{w=1}^W (x_{nchw}-\mu_{ng}(x))^2 + \epsilon}
μng(x)=(C/G)HW1c=gC/G∑(g+1)C/Gh=1∑Hw=1∑Wxnchwσng(x)=(C/G)HW1c=gC/G∑(g+1)C/Gh=1∑Hw=1∑W(xnchw−μng(x))2+ϵ
常用的 Normalization 方法:BN、LN、IN、GN
BatchNormalization、LayerNormalization、InstanceNorm、GroupNorm简介
Conditional Batch Normalization
传统的BN的公式为 y = x − E [ x ] Var [ x ] + ϵ ⋅ γ + β y=\frac{x-E[x]}{\sqrt{\text{Var}[x] + \epsilon}} \cdot \gamma + \beta y=Var[x]+ϵx−E[x]⋅γ+β,其中 γ \gamma γ和 β \beta β为网络层的参数,需要通过BP学习。
CBN中也需要对输入的feature先减均值,再除以标准差,但是做线性映射时,所乘的缩放因子为 γ p r e d \gamma_{pred} γpred,加的偏置为 β p r e d \beta_{pred} βpred,其中它们是将feature输入到MLP中前向传播得到的,而不需要模型通过BP学习。由于 γ p r e d \gamma_{pred} γpred和 β p r e d \beta_{pred} βpred均依赖于输入的feature,因此这样的方式称为Conditional Batch Normalization。
CBN出现于《Modulating early visual processing by language》一文中
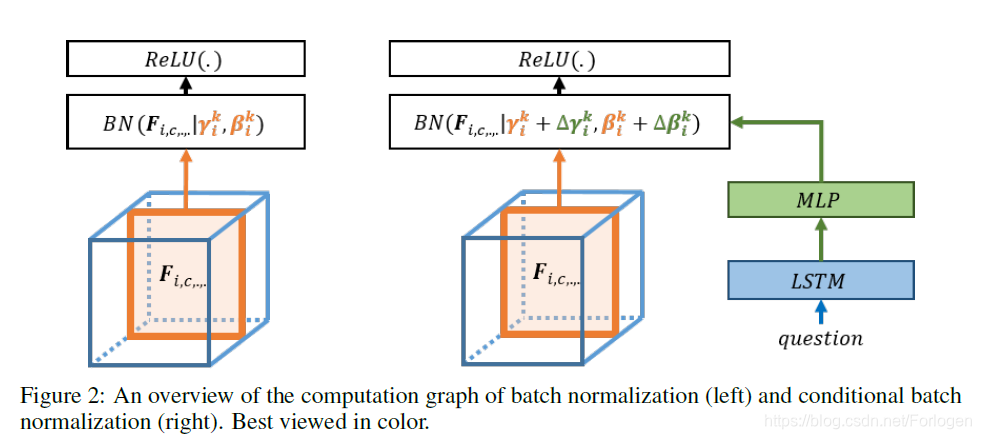
具体内容可见论文及下面的参考资料。
import torch.nn as nn
import torch.nn.functional as F
from torch.nn import init
class ConditionalBatchNorm2d(nn.BatchNorm2d):
"""Conditional Batch Normalization"""
def __init__(self, num_features, eps=1e-05, momentum=0.1,
affine=False, track_running_stats=True):
super(ConditionalBatchNorm2d, self).__init__(
num_features, eps, momentum, affine, track_running_stats
)
def forward(self, input, weight, bias, **kwargs):
self._check_input_dim(input)
exponential_average_factor = 0.0
if self.training and self.track_running_stats:
self.num_batches_tracked += 1
if self.momentum is None: # use cumulative moving average
exponential_average_factor = 1.0 / self.num_batches_tracked.item()
else: # use exponential moving average
exponential_average_factor = self.momentum
output = F.batch_norm(input, self.running_mean, self.running_var,
self.weight, self.bias,
self.training or not self.track_running_stats,
exponential_average_factor, self.eps)
# 使feature map和 out的维度相同
if weight.dim() == 1:
weight = weight.unsqueeze(0)
if bias.dim() == 1:
bias = bias.unsqueeze(0)
size = output.size()
weight = weight.unsqueeze(-1).unsqueeze(-1).expand(size)
bias = bias.unsqueeze(-1).unsqueeze(-1).expand(size)
return weight * output + bias
class CategoricalConditionalBatchNorm2d(ConditionalBatchNorm2d):
def __init__(self, num_classes, num_features, eps=1e-5, momentum=0.1,
affine=False, track_running_stats=True):
super(CategoricalConditionalBatchNorm2d, self).__init__(
num_features, eps, momentum, affine, track_running_stats
)
# 设置两个网络层,将图像的label转换为dense向量
# nn.Embedding(num_calsses,num_features)
# num_classes:类别数
# num_features:特征向量的维度
self.weights = nn.Embedding(num_classes, num_features)
self.biases = nn.Embedding(num_classes, num_features)
# 初始化self.weights和self.biases
self._initialize()
def _initialize(self):
init.ones_(self.weights.weight.data)
init.zeros_(self.biases.weight.data)
# 这里c为LongTensor形式
def forward(self, input, c, **kwargs):
# 根据c挑选出weights embedding和biases embedding层中的第c行,做为weight和bias输入基类的前向传播函数
weight = self.weights(c)
bias = self.biases(c)
# 得到Conditional Batch Normalization的输出
return super(CategoricalConditionalBatchNorm2d, self).forward(input, weight, bias)
具体可查阅 :Conditional Batch Normalization 详解 ,博主写的很详细
CBN在Self-Attention GAN 中的应用
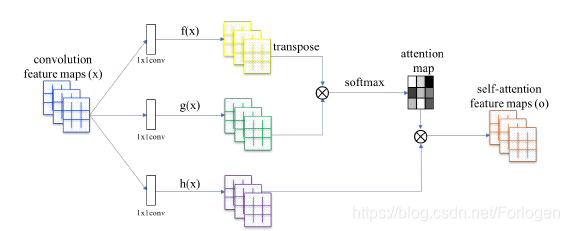
首先同通过卷积网络的隐藏层得到卷积的特征图(convolution feature maps)
x
x
x,然后通过
1
×
1
1 \times 1
1×1的卷积核得到两个特征空间(feature space)
f
=
W
f
x
f=W_{f}x
f=Wfx和
g
=
W
g
x
g=W_{g}x
g=Wgx,然后使用
f
f
f 和
g
g
g 来计算注意力,公式如下所示
β
j
,
i
=
exp
(
s
i
j
)
∑
i
=
1
N
exp
(
s
i
j
)
,
where
s
i
j
=
f
(
x
i
)
T
g
(
x
j
)
\beta_{j, i}=\frac{\exp \left(s_{i j}\right)}{\sum_{i=1}^{N} \exp \left(s_{i j}\right)}, \text { where } s_{i j}=f\left(x_{i}\right)^{T} g\left(x_{j}\right)
βj,i=∑i=1Nexp(sij)exp(sij), where sij=f(xi)Tg(xj)
其中
β
j
,
i
\beta_{j,i}
βj,i表示在生成第
j
j
j个区域的图像时对于第
i
i
i个位置局部的注意力,然后将结果经过softmax归一化得到注意力图(attention map)。接着使用得到的注意力图和通过另一个
1
×
1
1 \times 1
1×1卷积核得到的特征空间计算得到注意力层的输出
o
=
(
o
1
,
o
2
,
.
.
.
,
o
j
,
.
.
.
,
o
N
)
\text{o}=(o_{1},o_{2},...,o_{j},...,o_{N})
o=(o1,o2,...,oj,...,oN),其中
o
j
o_{j}
oj 计算为
o
j
=
∑
i
=
1
N
β
j
,
i
h
(
x
i
)
,
where
h
(
x
i
)
=
W
h
x
i
o_{j}=\sum_{i=1}^{N} \beta_{j, i} h\left(x_{i}\right), \text { where } h\left(x_{i}\right)=W_{h} x_{i}
oj=i=1∑Nβj,ih(xi), where h(xi)=Whxi
上述的三个权重矩阵 W f 、 W g 、 W h W_{f}、W_{g}、W_{h} Wf、Wg、Wh需通过训练学习。最后将注意力层的输出和 x x x进行结合,得到最终的输出 y i = γ o i + x i y_{i}=\gamma \boldsymbol{o}_{\boldsymbol{i}}+\boldsymbol{x}_{\boldsymbol{i}} yi=γoi+xi,其中 γ \gamma γ初始设置为0,使得模型可以从简单的局部特征学起,逐渐学习到全局。
def forward(self,x):
"""
inputs :
x : input feature maps( B X C X W X H)
returns :
out : self attention value + input feature
attention: B X N X N (N is Width*Height)
"""
m_batchsize,C,width ,height = x.size()
proj_query = self.query_conv(x).view(m_batchsize,-1,width*height).permute(0,2,1) # B X CX(N)
proj_key = self.key_conv(x).view(m_batchsize,-1,width*height) # B X C x (*W*H)
energy = torch.bmm(proj_query,proj_key) # transpose check
attention = self.softmax(energy) # BX (N) X (N)
proj_value = self.value_conv(x).view(m_batchsize,-1,width*height) # B X C X N
out = torch.bmm(proj_value,attention.permute(0,2,1) )
out = out.view(m_batchsize,C,width,height)
out = self.gamma*out + x
return out,attention
CBN在《cGANs With Projection Discriminator》中的应用
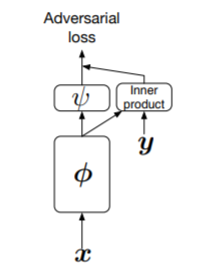
输入图片首先经过网络 ϕ \phi ϕ提取特征,然后把特征分成两路:一路与经过编码的类别标签 y 做点乘,另一路再通过网络 ϕ \phi ϕ映射成一维向量。最后两路相加,作为神经网络最终的输出。注意这个输出类似于 W-GAN,不经过 sigmoid 函数映射,越大代表越真实。
def forward(self, x, y=None):
h = x
h = self.block1(h)
h = self.block2(h)
h = self.block3(h)
h = self.block4(h)
h = self.block5(h)
h = self.activation(h)
# Global pooling
h = torch.sum(h, dim=(2, 3)) # 提取x特征,送入两路,一路判断是否真实,一路判断是否属于label类
output = self.l6(h) # 相当于 vanilla GAN, 判断 x 是否真实
if y is not None:
# 相当于不加 softmax 的 classifier, 直接提取 classifier 在 label 对应的维度的输出
class_out = torch.sum(self.l_y(y) * h, dim=1, keepdim=True)
# 把两部分加起来作为 discriminator 的 output
output += class_out
return output

















 934
934

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









