




 本文详细介绍了无人驾驶车辆模型预测控制的算法,包括车辆运动学方程、非线性系统线性化、离散化过程,以及目标函数优化和约束条件。重点探讨了线性化方法,通过泰勒级数展开并保留一阶项,构造线性化后的状态空间方程,并对系统进行离散化处理。此外,还讨论了迭代推导、输出方程和目标函数的优化,为无人驾驶车辆控制提供理论基础。
本文详细介绍了无人驾驶车辆模型预测控制的算法,包括车辆运动学方程、非线性系统线性化、离散化过程,以及目标函数优化和约束条件。重点探讨了线性化方法,通过泰勒级数展开并保留一阶项,构造线性化后的状态空间方程,并对系统进行离散化处理。此外,还讨论了迭代推导、输出方程和目标函数的优化,为无人驾驶车辆控制提供理论基础。
一、状态轨迹的线性化方法
1.理解:
第四章的期望轨迹给出了路径上每个点的状态信息(包括状态量和控制量),这类轨迹比较规则,比如直线、圆等,因此其控制量也容易得到,而对于“期望轨迹无法给出所有状态点的信息”的情况,则需要采用下面的算法。
2.算法详细推导
第五章采用的算法是通过对系统输入持续不变的控制量得到状态轨迹。
目录
①前言
以及:龚建伟等.《无人驾驶车辆模型预测控制》(第2版)
同时对自己在代码实现时需要用到的推导细节给出了更加详细的说明,以帮助自己更好的理解~算是自己学习过程的记录。好了,下面就正式开始吧!
模型预测控制的核心是通过建立基于状态量的误差量的状态空间方程来推导。第四章通过车辆的运动学方程,采用了非线性系统线性化方法中的第一种:存在参考系统的线性化方法。
②车辆的运动学方程
车辆的运动学方程推导过程略,结果如下:
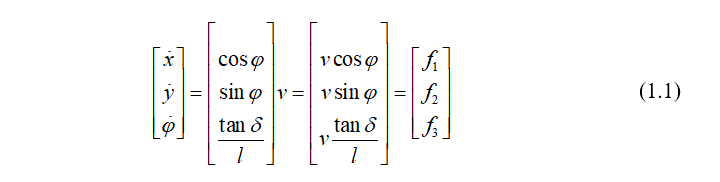
即:
·····························(1.2)
选取系统的状态量为,控制量
主要思想:假设参考轨迹给定,且参考轨迹在任意时刻其状态量和控制量均满足:
·····························(1.3)
其中,,
。
ps①: 1.
是状态转移函数,就理解为数学中表示函数的符号就可以了;
2.
为车辆后轴中心坐标,
为车辆的航向角,
为前轮偏角,
为车辆后轴中心 的速度;
3.在该车辆模型中,状态量个数是3个,用
表示;控制量个数是2个,用
表示,在之后的推导过程的说明中,就直接用
来表示~~~
③线性化过程
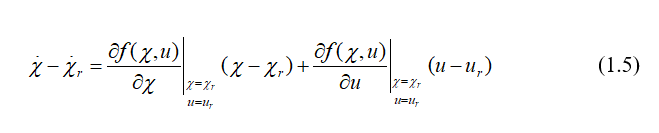
上面的运动学方程是非线性的,所以需要对其进行线性化。对
在参考轨迹点采用泰勒级数展开并忽略高阶项,只保留一阶项:

将(1.4)式减去(1.3)式,得:
记: ,
,
。
ps②:
、
、
矩阵的大小均为:
,
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1333
1333

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









