



💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
💥1 概述
在灾难响应中,部署最佳多跳点对点路由是至关重要的,以确保及时、可靠的通信和信息传输。首先,需要对灾难发生地点的环境进行全面分析。这包括地形、建筑结构、通信基础设施的状况等因素。这些信息对于确定最佳的多跳点对点路由非常关键。基于环境分析的结果,制定最佳的多跳点对点路由规划。这需要考虑到通信距离、地形阻隔、信号干扰等因素。在路由规划过程中,需要确定每个节点的角色(如中继节点、终端节点等)以及它们之间的连接方式。选择适当的多跳通信协议对于确保通信的成功至关重要。协议应该考虑到网络的动态性、节点能耗、数据传输的可靠性等因素。根据路由规划,将通信节点(如移动设备、通信基站等)部署在合适的位置。这可能涉及到物理安装、节点配置和测试等步骤。一旦部署完成,需要对网络进行优化和调整。这可能包括信号增强、节点位置调整、协议参数优化等。通过不断优化,确保网络能够在不断变化的环境中保持高效稳定的运行。这种最佳多跳点对点路由部署方案能够有效地提高灾难响应的通信效率和覆盖范围,为救援人员和受灾群众提供及时、可靠的通信支持。
1. 灾难响应场景下无人机群的通信需求与挑战
1.1 核心应用场景
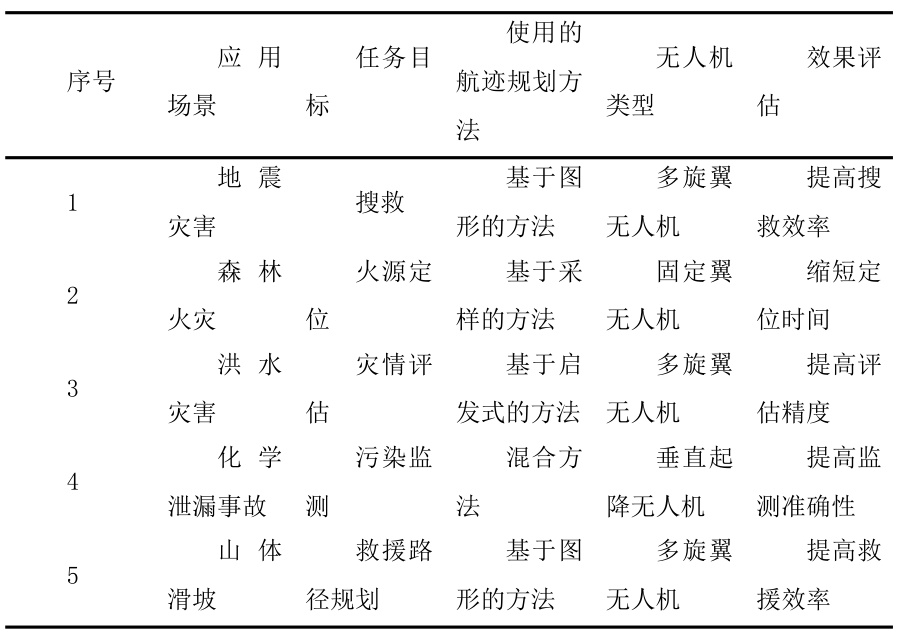
- 灾情监测与侦查
无人机通过高清摄像头、热成像仪实时采集灾区影像,快速识别道路损毁、建筑物倒塌及人员被困位置,为救援决策提供可视化依据。 - 搜索与救援
在复杂地形(山林、水域)或恶劣天气(夜间、大雾)中,搭载热成像仪和喊话系统的无人机定位受困者,实施语音引导救援,提高生还率。 - 物资投送
在交通中断的边远山区或封锁区域,无人机运输药品、食品、通信设备等紧急物资,突破传统物流瓶颈。 - 通信中继恢复
灾后基础设施损毁时,无人机群构建临时通信网络,实现救援指令传输与受灾群众联络。
1.2 通信技术挑战
- 动态拓扑适应性:灾区环境变化(余震、火势蔓延)导致链路频繁中断,需路由协议快速重构路径。
- 实时性与可靠性:指令传输延迟需控制在毫秒级(<10ms),且需在干扰环境下保证数据完整。
- 资源约束:无人机能量有限,路由算法需优化能耗;节点计算能力受限,需低复杂度协议。
- 扩展性:大规模无人机群需支持高密度节点协作,避免网络拥塞。
2. 多跳点对点路由技术原理与优化方向
2.1 基本原理
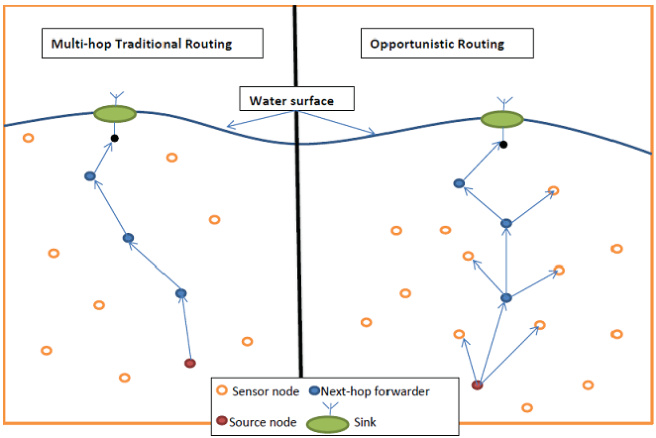
多跳点对点路由通过节点间协作实现数据接力传输,无需依赖中心基础设施。每个节点兼具数据转发与路由功能,通过“接力”机制构建源节点到目标节点的路径。关键技术包括:
- 路由发现:源节点广播请求,中继节点响应并建立路径(如AODV协议)
- 路径决策:基于链路质量、节点剩余能量、跳数距离、网络拥塞度等指标选择最优路径
- 自愈机制:链路中断时通过局部重路由或全网重发现快速恢复连接
2.2 动态环境适应性改进方案
| 优化方向 | 技术方案 | 效果 |
|---|---|---|
| 能量感知路由 | 动态跳数优化(DRESG模型) + 剩余能量优先(DMATEB方案) | 能耗降低50%,网络寿命延长20%-30% |
| 强化学习路径选择 | EMH算法基于环境反馈动态调整路由 | 能效比单跳提升30% |
| 协议栈优化 | HARE协议整合TDMA时隙、功率控制与能量感知路由 | 数据到达率99%,多跳能耗降40% |
| 机会路由 | 动态选择中继节点(如OR协议),替代固定路径 | 提升链路中断时的传输成功 |
3. 多跳路由算法性能对比与灾难场景适配性
3.1 主流协议性能对比
基于文献仿真数据与灾难场景需求,关键协议性能如下:
| 协议 | 核心机制 | 优势 | 局限性 | 灾难场景适配性 |
|---|---|---|---|---|
| AODV | 按需距离矢量路由,目标序列号防环 | 低延迟(<50ms),快速响应拓扑变化 | 高移动性下控制开销大 | 中小规模动态灾区 |
| DSR | 源路由,路径缓存机制 | 高投递率(>95%),无周期性广播 | 源路由头部开销大 | 稳定链路场景(如山火监测) |
| OLSR | 多点中继(MPR)优化链路洪泛 | 低控制开销,适合高密度网络 | 移动性高时MPR选择频繁更新 | 大规模固定翼无人机群 |
| GPSR | 贪心转发+周边路由(基于位置) | 无状态路由,存储开销极小 | 地形遮挡易导致路由空洞 | 开阔地形物资运输 |
3.2 智能优化算法进展
- 蚁群优化(ACO):
- 改进ACO引入偏离距离因子与自适应信息素权重,收敛速度提升40%,避免局部最优
- ACO-DTSP算法在负载约束下最小化任务时间,实时性优于Christofides算法
- 两阶段优化(DM-PSO):
第一阶段理论推导传输速率上限,第二阶段用扩散模型优化粒子群,灾后通信速率提升35% - 混合整数规划:
增强ACO解决能量约束问题,但计算复杂度较高,适合离线规划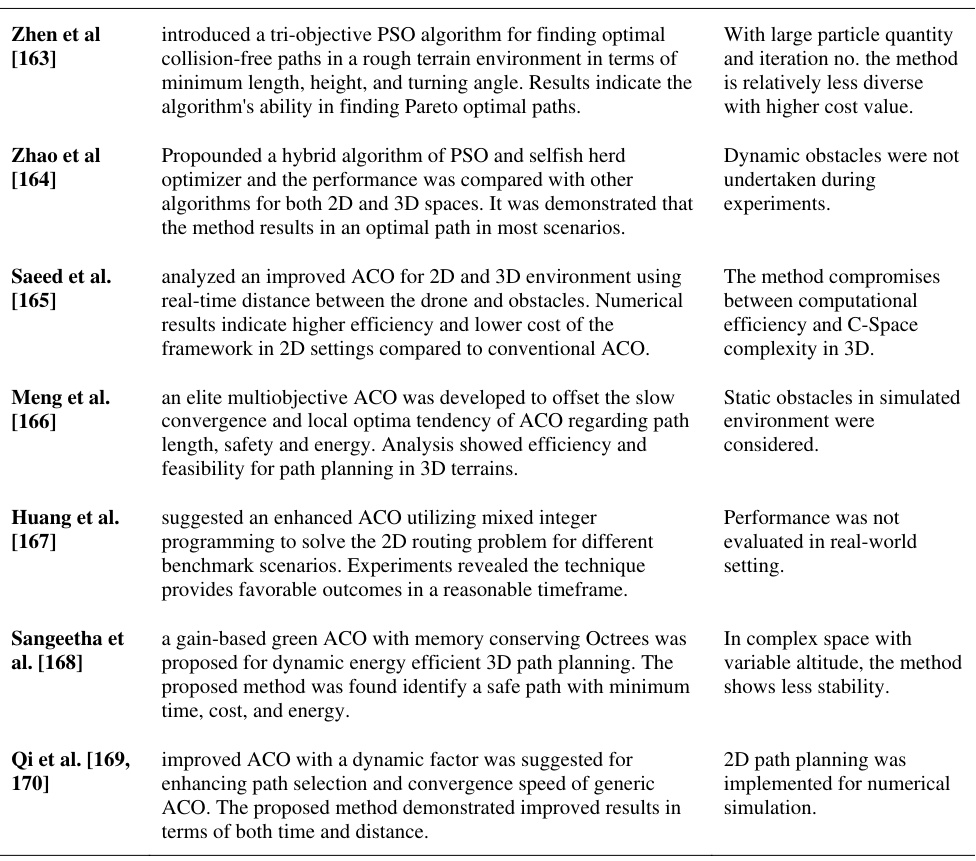
4. 灾难场景拓扑设计案例与部署策略
4.1 拓扑结构设计
| 架构类型 | 适用场景 | 案例 | 优势 |
|---|---|---|---|
| 集中式 | 小范围精准任务(如建筑搜救) | 1架指挥机控制多架侦查机,实时回传三维重建数据 | 指令统一,延迟低 |
| 分布式 | 大范围覆盖(如地震灾区) | 九寨沟地震中20个移动终端+7个基地,无人机自组Ad-Hoc网络,最小生成树部署中继 | 高容错性,局部故障不影响全网 |
| 混合式 | 多任务协同(监测+物资投送) | 多个子群独立执行任务,区块链保障跨群数据可信 | 兼顾效率与扩展性 |
4.2 部署优化建议
-
分层部署策略
- 低空层(50-100m):旋翼无人机执行侦查/物资投送,采用AODV协议适应动态地形
- 中空层(200-500m):固定翼无人机作通信中继,OLSR协议降低控制开销
-
通信-任务协同优化
- 物资运输无人机采用GPSR协议减少计算负载
- 搜索无人机搭载强化学习模块,动态切换DSR/ACO路由
-
抗干扰增强
- 白名单管理中继节点负载,避免拥塞
- 机会路由(OR)应对突发链路中断
5. 未来研究方向
- 智能融合协议:结合深度强化学习与传统路由(如AODV-RL),实现环境预测型路径决策
- 绿色路由算法:光伏无人机群的能量感知路由,延长灾区持续作业时间
- 跨域协同:无人机-地面车辆联合组网,扩展覆盖范围(如洪涝灾害)
- 安全架构:区块链赋能的分布式信任机制,防止恶意节点攻击
结论
灾难响应中的无人机群多跳路由需平衡 实时性、可靠性与能耗效率。AODV和DSR协议适合高动态小规模场景,而OLSR和ACO优化算法在大型网络中表现更优。拓扑设计需按任务需求选择集中式、分布式或混合架构,并通过分层部署与协议协同提升系统鲁棒性。未来智能算法与跨域组网技术将进一步增强应急响应能力。
📚2 运行结果


主函数部分代码:
clc;
clear;
close all;
%% Problem definition
model = CreateModel1(); % Environment model
dt = 0.05; % Time step
% Lower and upper Bounds of particles (Variables)
VarMin.x=model.xmin;
VarMax.x=model.xmax;
VarMin.y=model.ymin;
VarMax.y=model.ymax;
VarMin.z=model.zmin;
VarMax.z=model.zmax;
VarMax.sen = 50; % sensing range
VarMax.com = 300; % communication range
% restriction of searching angle
VarMax.alpha = pi/4;
VarMin.alpha = -VarMax.alpha;
uavs = []; % Init the empty uavs list
% start position
start = model.start;
goal = start;
i = 0;
is_reach = false;
%% Searching
% for i = 1:size(model.goals,1)+1
while ~is_reach
i = i+1;
drone = Drone(i, start, 0, 1.0); % init uav
uavs = [uavs; drone]; % Store results
drone = drone.multi_target_tracking(model,uavs,dt,VarMax,VarMin);
if norm(drone.position - model.goal) < 5
is_reach = true;
end
end
% figure();
% drone.draw_drone();
% PlotHistogram(uavs, model)
save('drone.mat', 'uavs');
% Plot3DView(uavs, model);
PlotTopView(uavs, model);
PlotIteration(uavs);
ViewResults(uavs, model);
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]姜梦磊.面向无人机群网络的高效路由选择算法研究[J].[2024-05-16].
[2]赵敏,姚敏.无人机群变航迹多任务综合规划方法研究[J].电子科技大学学报, 2010, 39(4):4.DOI:10.3969/j.issn.1001-0548.2010.04.018.
[2]褚金奎,姜廷玮,李金山,等.拒止环境下基于粒子滤波的无人机协同导航方法[J/OL].光学与光电技术:1-7[2024-05-15].https://doi.org/10.19519/j.cnki.1672-3392.20240430.004.

















 473
473

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









