



Overview
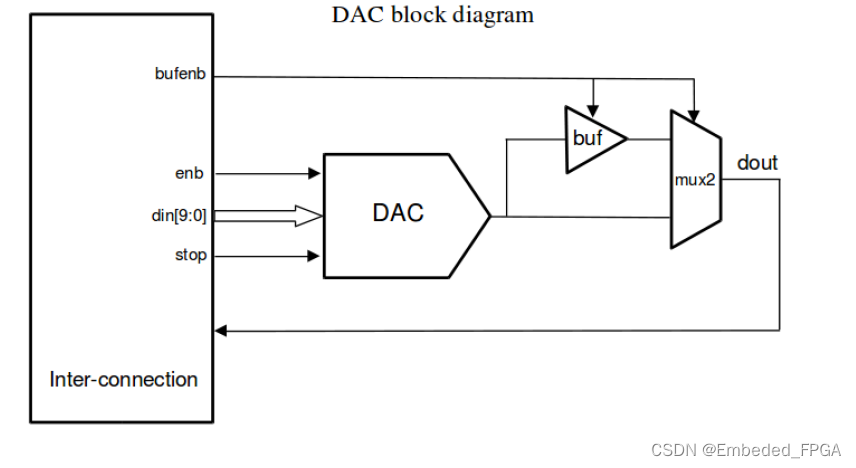
The Digital-to-analog converter converts 10-bit digital data to a voltage on the external pins. The output voltage can be optionally buffered for higher drive capability. The two DACs can work independently or concurrently.
DAC main features
(1) Two DAC converters: one output channel each
(2) Conversion triggered by external triggers
(3) Dual DAC channel independent or simultaneous conversions
(4) Configurable internal buffer
(5) External triggers for conversion
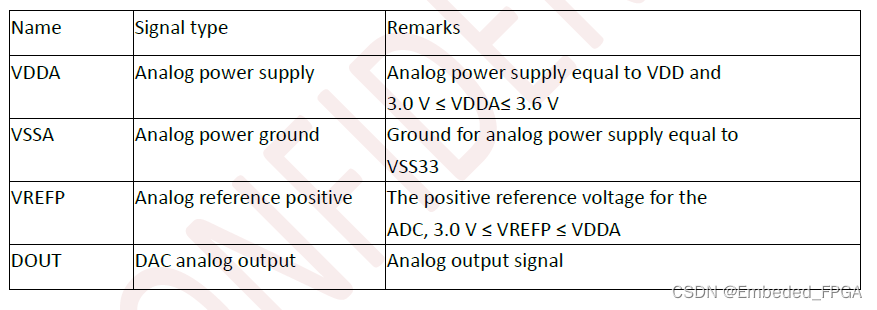
(6) Input voltage reference VREFP
DAC block pins
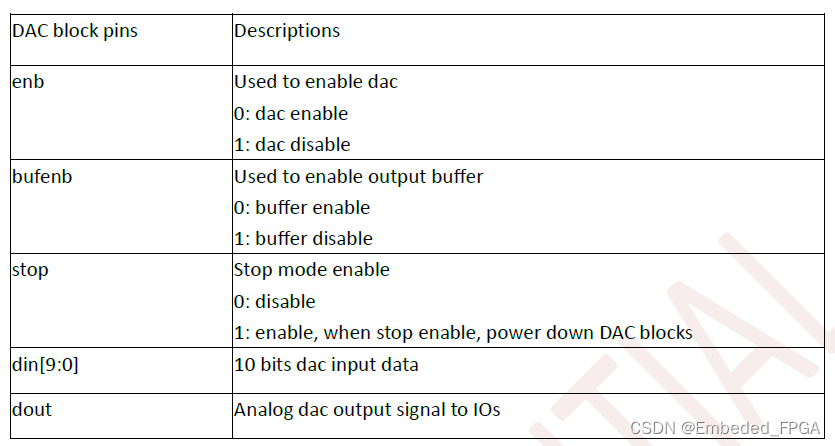
DAC Pins
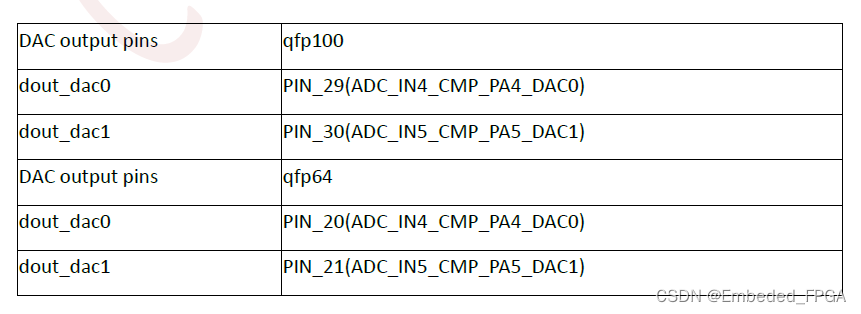
DACs output signals vs package pins
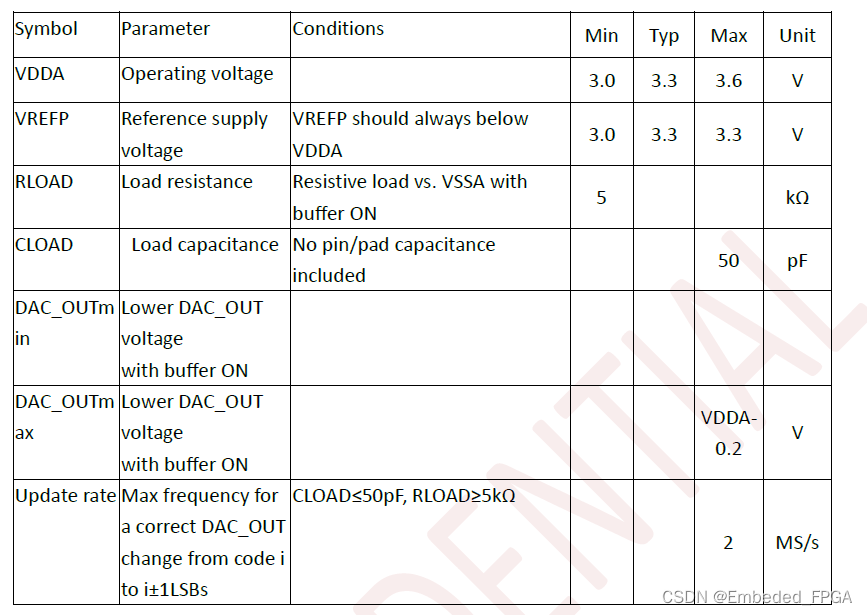
DAC characteristics
DAC output voltage
The analog output voltage on the DAC pin is determined by the following equation:
DACoutput = VREFP ∗ DAC_Dout/1024
The digital input is linearly converted to an analog output voltage, its range is 0 to VREFP。
Digital-to-analog converter (DAC)
最新推荐文章于 2025-11-15 20:14:08 发布
 本文介绍了10位数字到模拟转换器(DAC)的关键特性,包括两个独立或同时工作的通道、外部触发转换、可配置缓冲、以及输入电压参考和输出电压计算方法。DAC的输出电压范围由输入数据线性转换确定。
本文介绍了10位数字到模拟转换器(DAC)的关键特性,包括两个独立或同时工作的通道、外部触发转换、可配置缓冲、以及输入电压参考和输出电压计算方法。DAC的输出电压范围由输入数据线性转换确定。

















 4643
4643

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









