






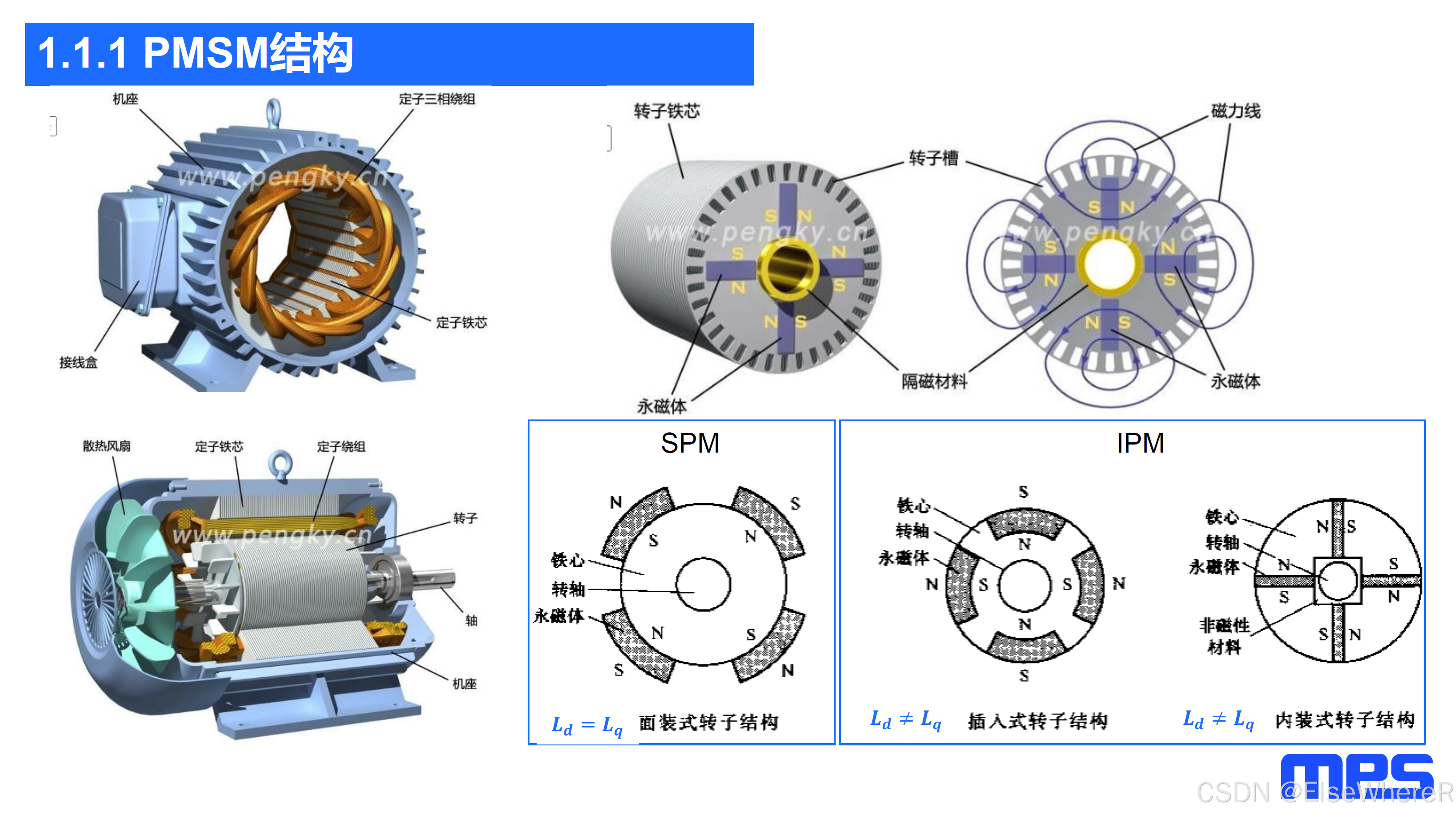
PMSM转子的永磁体的磁铁在转子中的位置是固定不变的,因此,转子机械位置 → 永磁体磁链方向(ψ_f)→ 通过磁路结构形成方向相关磁特性 → 体现为电感/阻抗差 → 被测得并用于推回转子角度。
 |
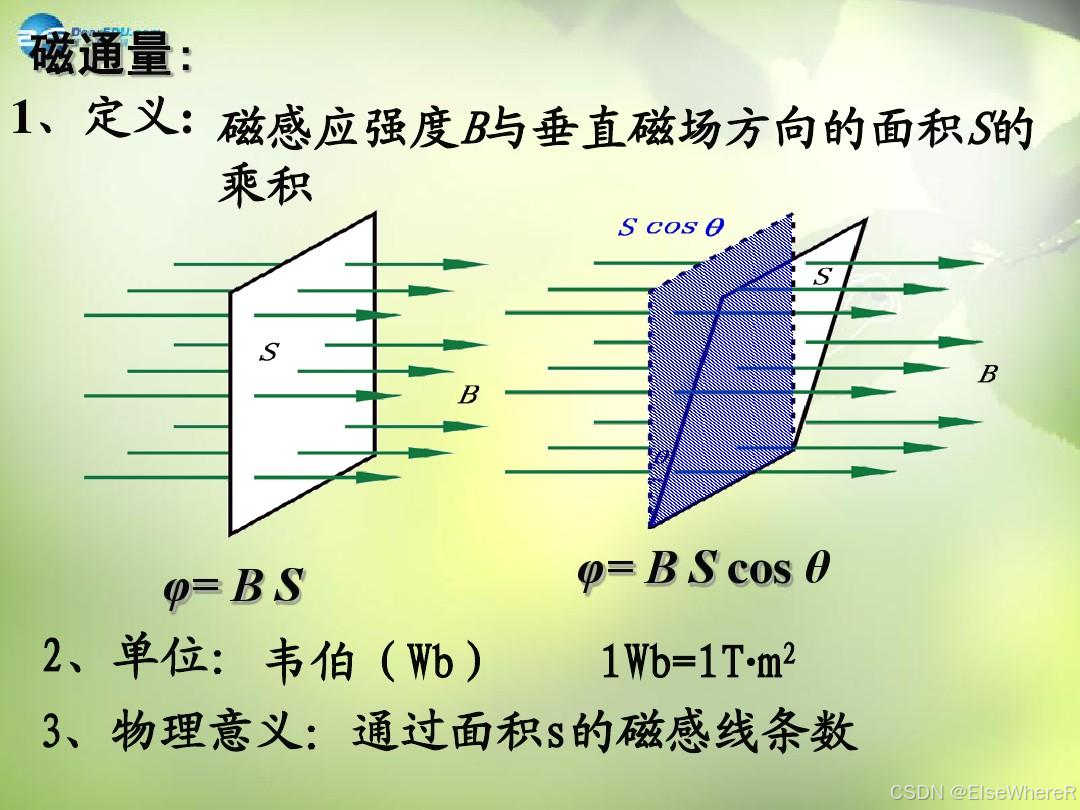
磁力线、磁链、磁路、磁通
| 磁力线:只有方向,没有大小,只是将磁路可视化。 |
 |
| 磁路:把大量磁力线整体简化成少数集中参数(磁阻、磁通)的工程模型。 |
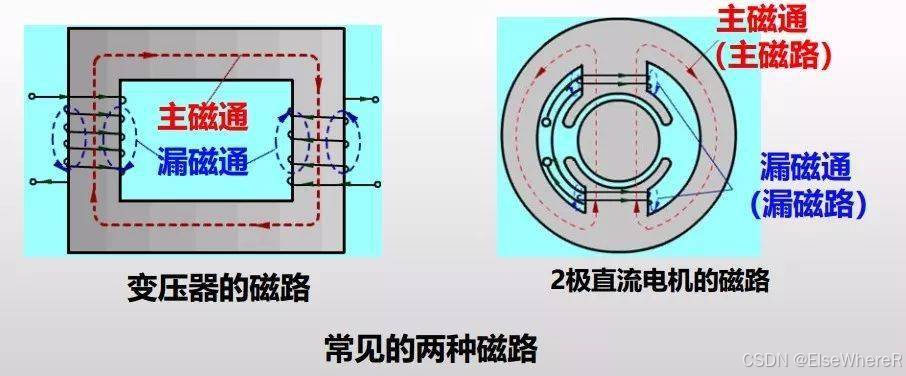 |
| 磁链 = 穿过线圈的磁通量 Φ 与线圈匝数 N 的乘积。 |
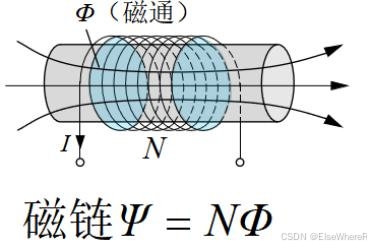 |
| 磁通:很像挂面,磁通就是挂面根数。 |
 |
 |
基本的概念已经理解了,那么在启动的时序就可以清晰明了:
0–T₁: 直流或低频定子磁场对齐,得 θ_align(粗角度),我觉得此时几乎为0°了;
T₁–T₂: 开启高频注入(脉动或旋转磁场),滤波器建立,高频电流分离;
T₂–T₃: 解调得到误差信号 εθ,PLL 快速收敛(指数下降);
T₃ 以后: 角度锁定;可平滑切入反电势/磁链观测的混合模式,转矩输出稳定上升。
所以,现在疑惑给到了第二个阶段,为什么HFI能够确定转子的位置呢?这里就得牵扯到电感了。我记得高中的时候,物理老师讲到条形磁铁插进环形线圈的时候,会发生的现象是‘插不让插,拔不让拔’,现在想一下,物理老师的这个比喻非常的精妙,现在才知道物理老师的比喻真的是精彩他妈给精彩开门,精彩到家了。
|
|
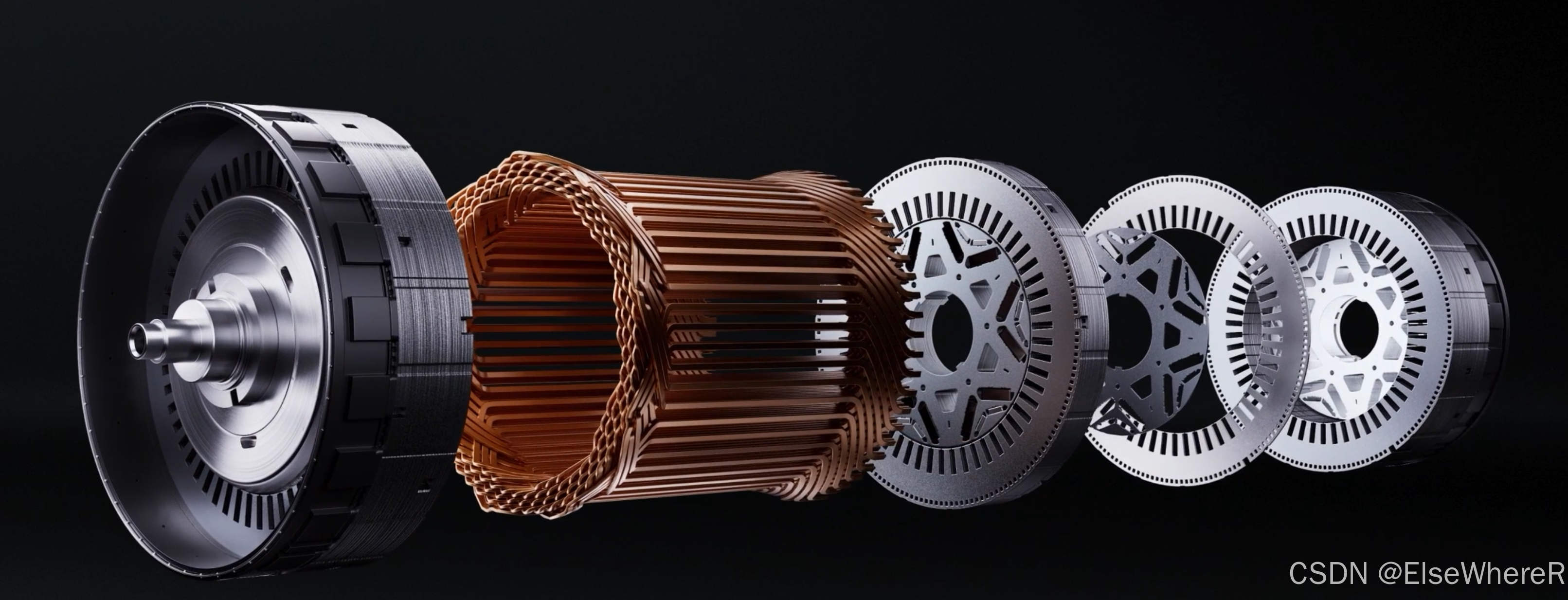
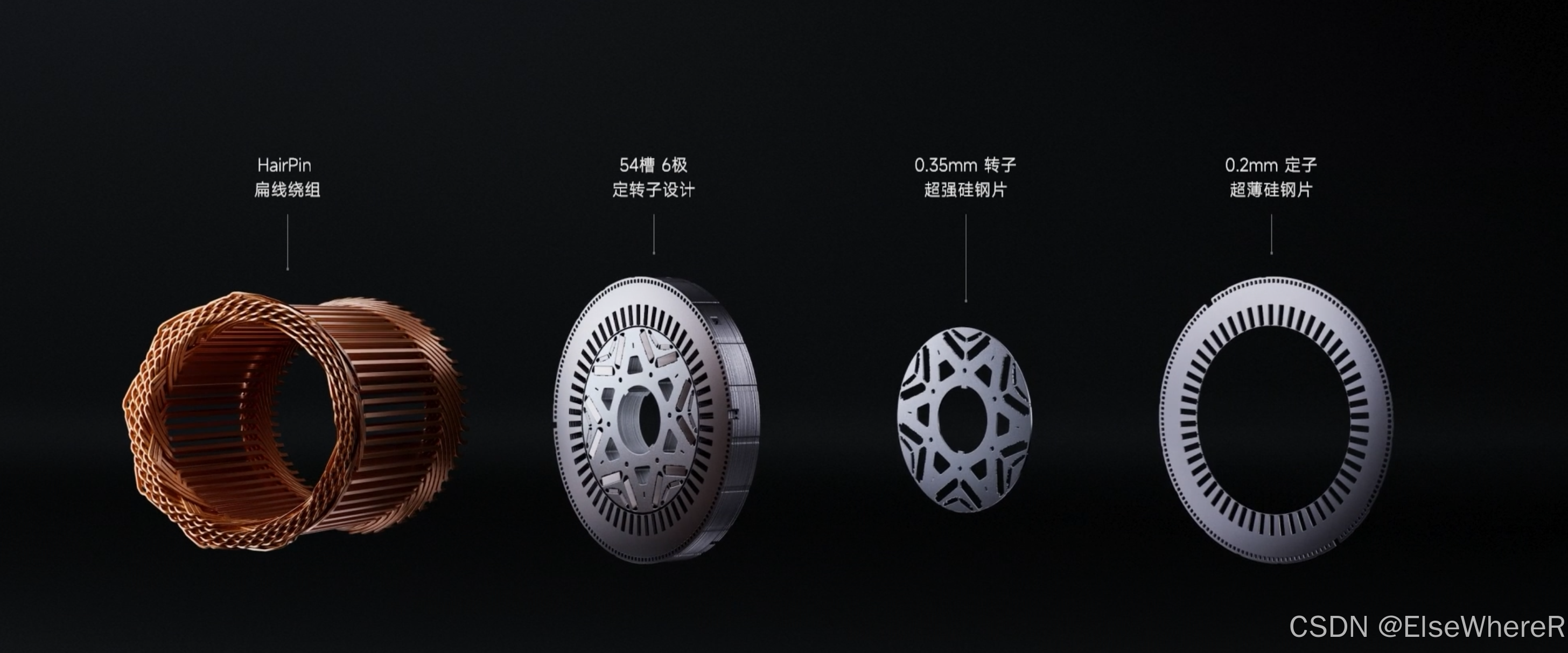
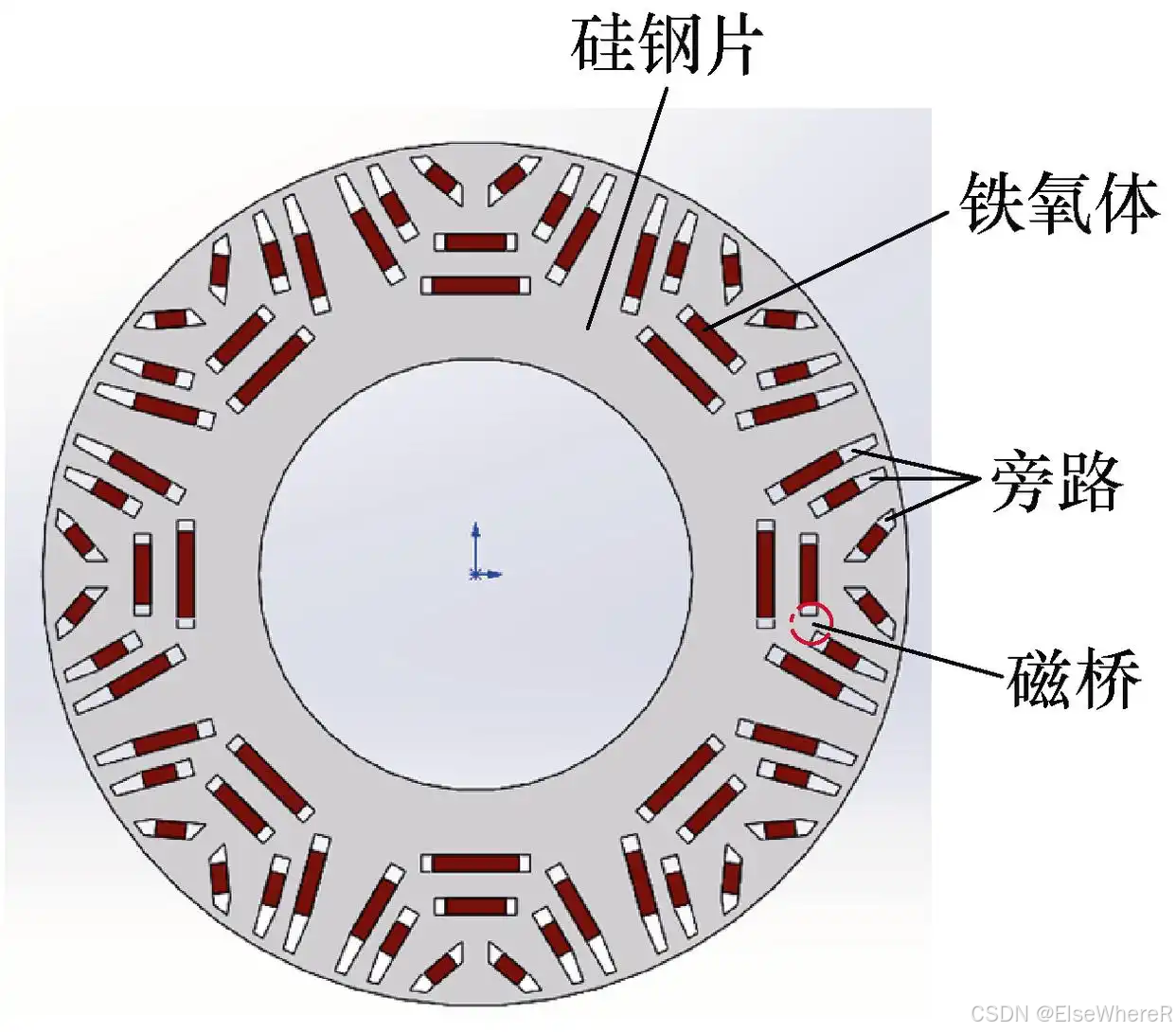
抽象,是一个很牛逼的技能,上图是实物电机的结构示意图,But now, I will abstract。
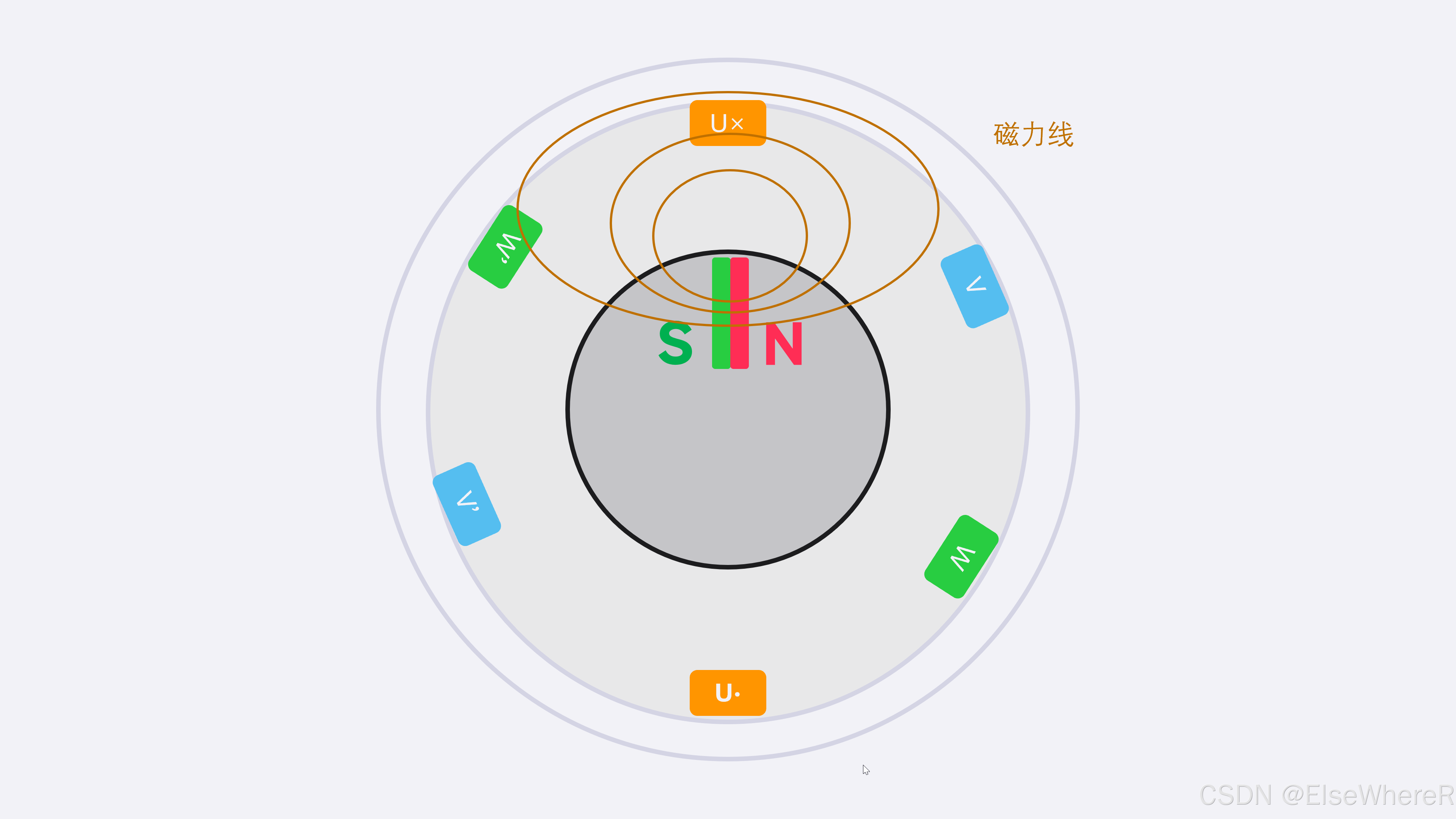 |
将U相和一个永磁体abstract出来:
 |
|
|
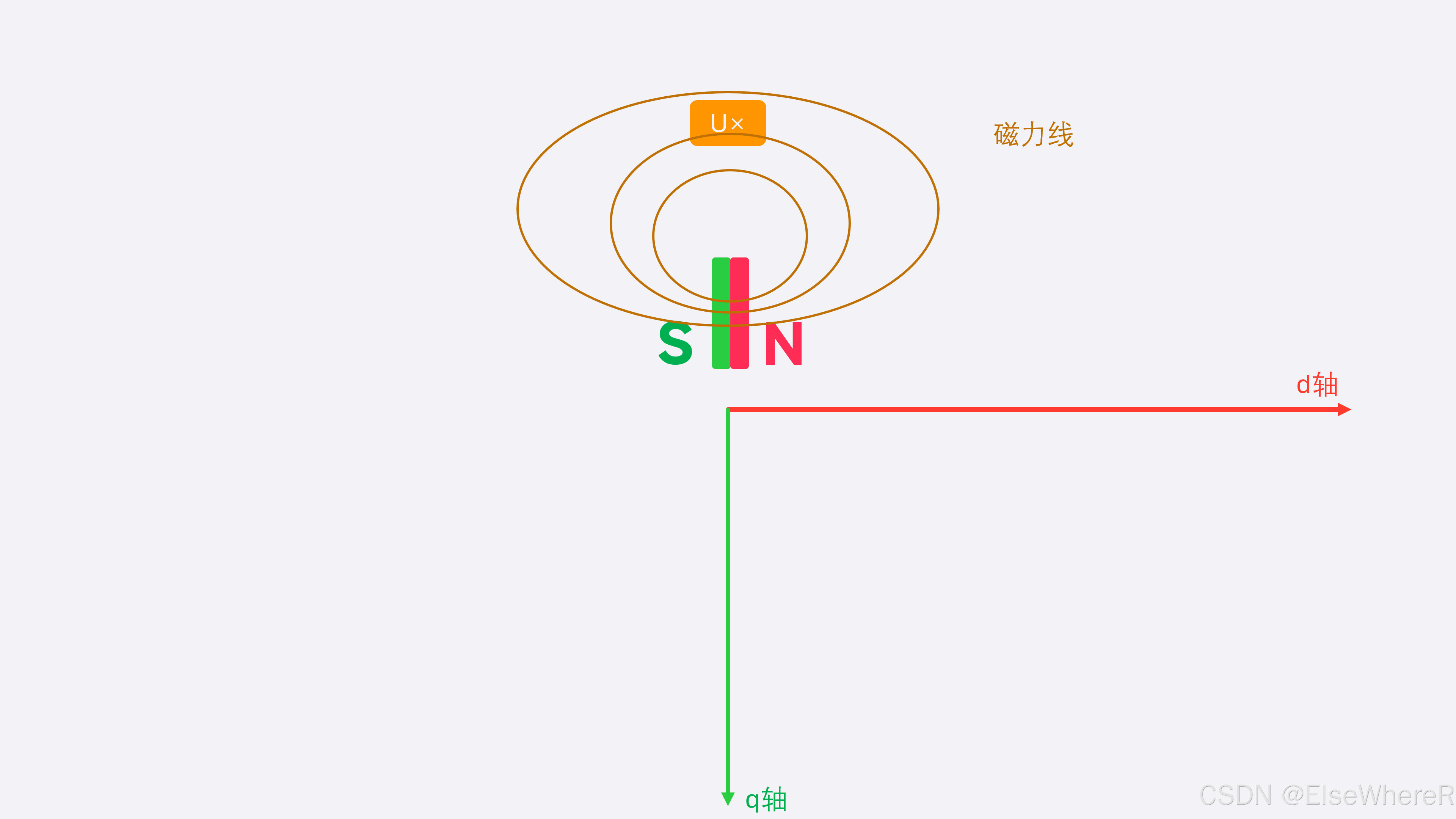
电感是可以通过三相电的电压电流的方法来测量的,电感的测量其实就是创造一个已知的电压或电流变化,隔离掉电阻与反电势后,用电压-电流(或磁链)关系的斜率求出 ψ 对 I 的比例或微分;对电机再加上角度和方向旋转,就能分离出 Ld 与 Lq。
对于转子的永磁体的磁力线来说,由于d轴方向的磁力线必须穿过永磁体 + 两侧磁桥回到定子 → 阻力(磁阻)大。q 轴方向的交轴磁通主要在转子铁芯中绕过磁体横向流动,不穿永磁体主体,也不集中在薄磁桥 → 磁阻低。
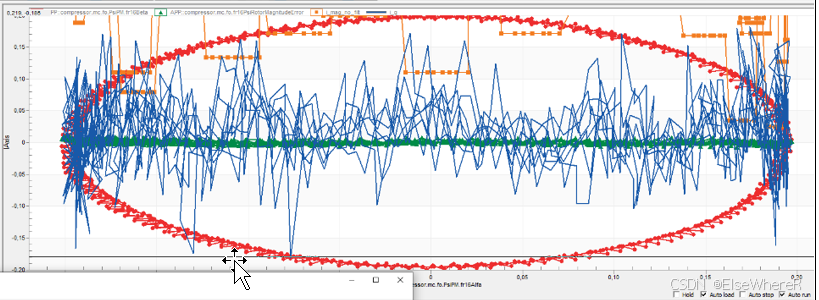
这个时候,让一个高频电压矢量在定子 αβ 坐标系里匀速旋转一圈,会产生电流,记录高频电流轨迹;由于 d、q 方向增量电感不同,电流轨迹是椭圆(而非圆),椭圆主轴方向给转子角度,主轴与副轴的电流幅值(或感抗)通过 I = V/(ωL) 关系反推出 Ld、Lq。这其中需要一些mathematics tricks,当然那,变化率一定会用到微积分,这个数学上的小把戏可以先不讲,这边只需要知道一句话,给定子施加电压,可以知道电流的轨迹,通过电流的椭圆形轨迹,可以知道Ld和Lq,椭圆的长轴,指向就是转子磁链方向。
 |
所以最后还是得用抽象的数学。

















 1747
1747

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









