




https://mp.weixin.qq.com/s/oqKHrl_xZjU-oE9YsR6koA
本次笔记,记录的是“如何理解上文中的一些内容”?
1、原文:
“当发现队列满了后,就会调用变量queue的wait()方法,该生产者线程就会被进入等待状态,并且释放Queue对象的监视器锁,让其他生产者线程和消费者线程去竞争这个监视器锁,打破了死锁产生的四个条件中的请求并持有条件,避免发生死锁,同样的,当发现队列空了后,也会调用变量queue的wait()方法,该消费者线程会进入等待状态,并且释放Queue对象的监视器锁,让其他消费者线程和生产者线程去竞争这个监视器锁,打破了死锁的四个条件中的请求并持有条件,避免发生死锁”
理解:
调用wait会释放锁,由其他线程(生产线程、消费线程)进行抢占,待当前线程再次抢占到锁的时候,才会继续执行后续代码。
public void produce() {
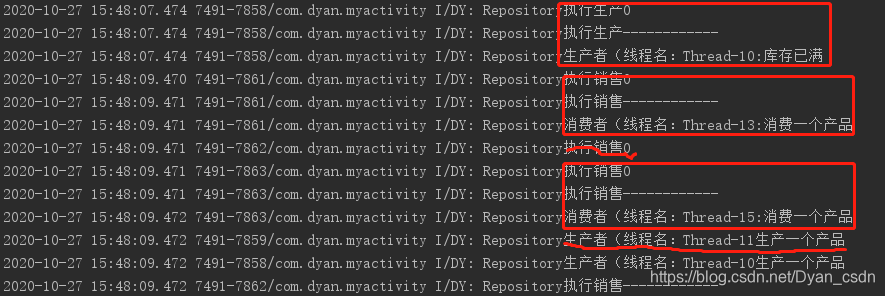
LogUtils.i(TAG, "执行生产0");
synchronized (queue) {
LogUtils.i(TAG, "执行生产------------");
while (queue.size() == MAX_SIZE) {
try {
LogUtils.i(TAG, "生产者(线程名:" + Thread.currentThread().getName() + ":库存已满");
//队列满后,调用wait,生产线程进入等待状态,释放Queue对象的监视器锁。
queue.wait();
} catch (InterruptedException e) {
e.printStackTrace();
}
}
//如果队列没满,创建新的Object对象放在队尾
queue.offer(new Object());
LogUtils.i(TAG,"生产者(线程名:" + Thread.currentThread().getName() + "生产一个产品");
//通知其他生产者线程和消费者线程
queue.notifyAll();
}
}
public void consume() {
LogUtils.i(TAG, "执行销售0");
synchronized (queue) {
LogUtils.i(TAG, "执行销售------------");
while (queue.size() == 0) {
try {
LogUtils.i(TAG, "消费者(线程名:" + Thread.currentThread().getName() + ":库存已空");
queue.wait();
} catch (InterruptedException e) {
e.printStackTrace();
}
}
//如果队列存在元素,将队首元素出列
queue.poll();
LogUtils.i(TAG, "消费者(线程名:" + Thread.currentThread().getName() + ":消费一个产品");
//通知其他消费者线程和生产者线程
queue.notifyAll();
}
}


















 1752
1752

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









