




目录
前言
在图像识别的任务上,我们通常会使用到卷积层和池化层,那么卷积和池化的具体计算过程是如何的呢?相关的名词概念是什么意思呢?在代码上要如何实现呢?下面我们将回答这几个问题,最后用Pytorch进行代码实现。
图像的组成
卷积和池化一般是在图像上进行操作的,所以我们有必要将图像的组成讲清楚。
首先我们平时拍出来的图像大多是有若干个像素组成,比如有的图像的分辨率是28*28,那么它就是有28*28个像素组成。每个像素我们可以理解为一个小格子,我们在每个格子里涂上不同的颜色,就能形成一张色彩丰富的图片。

假设格子数够多,这图像就越有高清的感觉,因为它足够的细腻。假如我给你三个格子来表示脸,那你最多只能涂三种颜色。但如果我给你成千上万个格子表示脸,脸上每个细节你都能画出来。

图片来自网络
上述只是我们在直观上理解,那么计算机上如何表示呢?
按照我们刚才分析的,我们只需要记录每一个格子的位置和它所存储的颜色便可以了。计算机使用矩阵来解决这个问题,我们可以把矩阵看成一个方阵。大家上学时都做过广播体操吧?所有同学排成几行几列的方阵。我们的矩阵就像这个方阵,行数和列数与图片的尺寸一样,当我们需要知道第三行第五列这个像素的数值,我们只需要访问矩阵里同样位置所存储的数据便可以了。
解决了格子位置的问题,我们还要考虑如何表示所存储的颜色。众所周知,我们的色彩可以使用三原色组合而成,我们可以用三原色混合出所有的颜色,我们只需要控制三种颜色的比例便可以了。计算机也是如此操作的,只不过我们在图像处理中用的三原色是红色(RED)、绿色(GREEN)和蓝色(BLUE),也就是我们熟知的RGB,如果学过PS的肯定了解这个。
我们用三组0~225来表示这个颜色使用的程度,越靠近225,使用的颜色就越深,越靠近0,使用的颜色就越浅。
图片来自网络
知道格子位置与颜色深度的表示,下面我们来讲讲常见的两种存储方式。第一种就是只有一个矩阵,每个格子里按顺序存储三组颜色数据。第二种方法是使用三个矩阵,每个矩阵掌控一种颜色,矩阵里每个格子就存储一个数字。我们可以把每个矩阵称为一个通道,我们有三个矩阵,那么就有三个通道了。
当然我们还可以多给它加几个通道,记录更多数据,比如这个点的深度或者其他信息。如果我们要表示黑白灰照片,可以只使用一个通道。通常单通道图像都是灰度图,三通道图像都是彩色图,四个通道的图像一般是通过深度相机获取的。
卷积
卷积的过程其实就是一个小框框扫描整张图,如下图:
图片来自网络
我们可以把这个框框叫卷积核(kernel_size),它是一个正方形的框框,它可以是3*3、5*5、7*7或者你设定的其他尺寸。
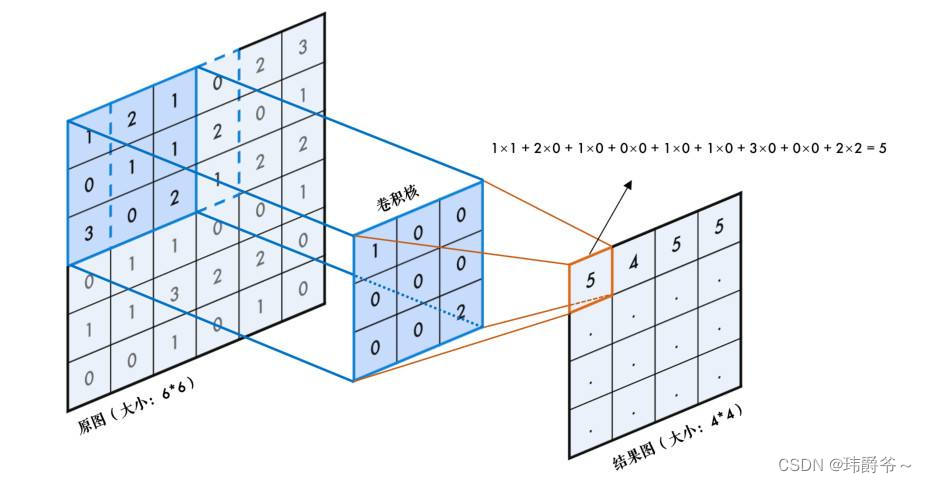
每次扫描时我们做如下的计算,卷积核上每个数字乘上被扫描区域对应位置的数字,然后加在一起。
图片来自网络
那么在扫描时,卷积核每次要移动多少呢?这就要引入步长(stride)的概念。
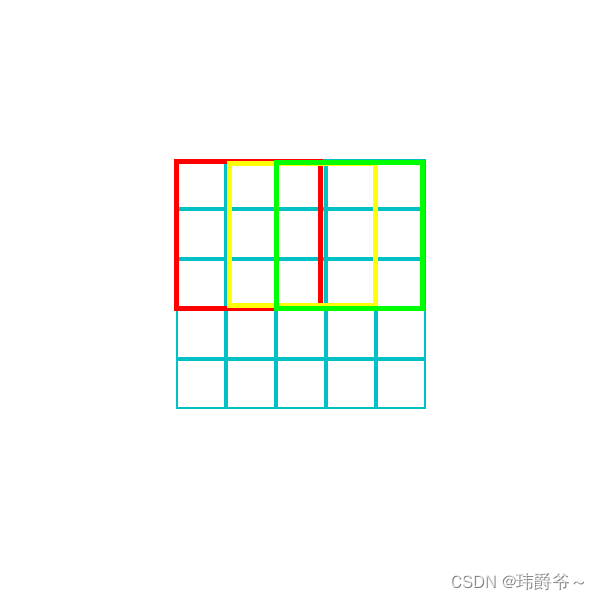
如这张图,假设红色框框是卷积核一开始所在的位置,如果步长为1,那么它每次会移动一格,下一次便移动到黄色框所在的位置,再下一次就到了绿色框的位置。
如果步长是2,那么红色框下一次便会直接移动到绿色的区域。
这便是步长的概念,衡量框框每次移动的距离。
根据上面的图片我们可以知道,每次卷积后得到新的图片会比原来的图片更小,而且边缘的信息可能只被利用了一两次,而中间的像素被多次扫描到,会利用很多次,因此卷积对边缘的信息不太友好。为了解决这两个问题,我们可以在原图的外围补上几圈0,这个操作就叫padding。
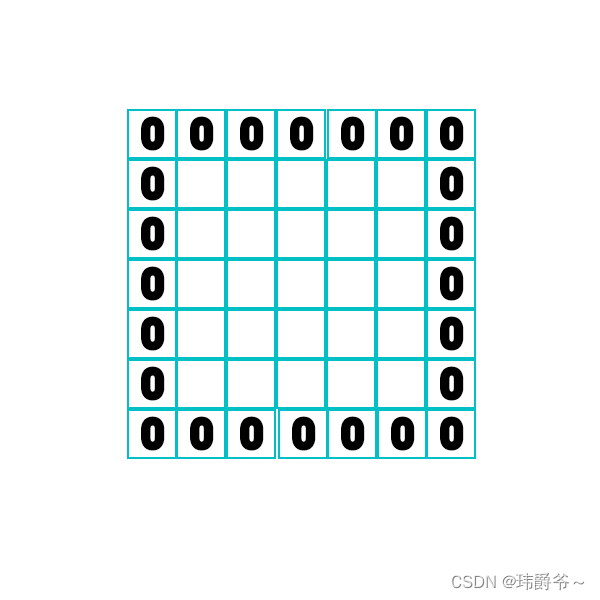
如果补一圈,那么padding=1,补两圈的话,padding=2。
通过补0,增加了原图像尺寸,使原来的边缘信息更靠近中心,从而解决了刚才提到的两个问题。
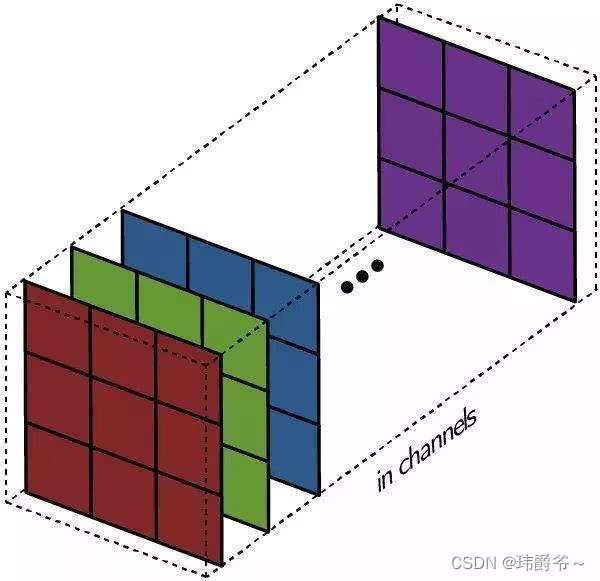
刚才说了这么久都是在一个通道上进行卷积,而我们的卷积层可能面对多个通道的图像。因此接下来我们升级到多通道卷积:
图片来自https://mlnotebook.github.io/post/CNN1/
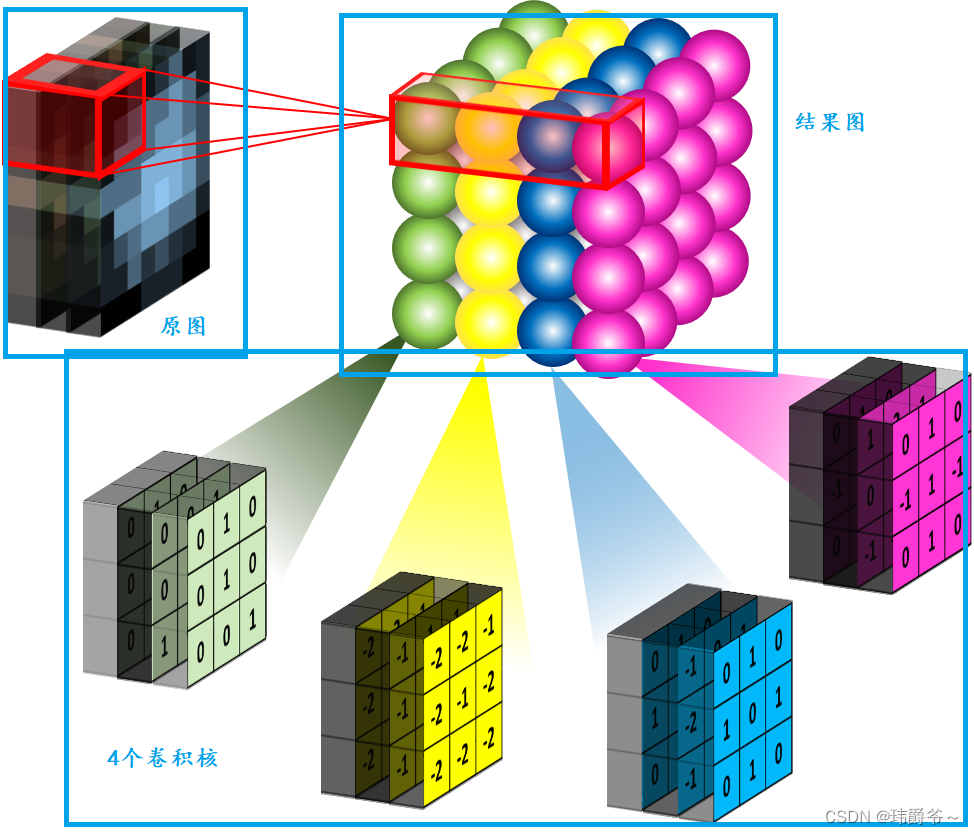
我们可以看到原图是有三个通道,而我们有四个同样有着三通道的卷积核,经过计算后,最后我们的输出是一张四通道的图像。
而且从图中我们不难看出,每个卷积核扫描完原图后会生成一个通道的图像,四个卷积核计算完后,结果合起来才是一张四通道的图像。
我们其实可以把每个通道看成图像的一个特征,每个卷积核负责检测一个特征,那么多通道卷积就相当于,我用M个卷积核去一张有N个通道(特征)的图像上做扫描,最后得到一张有M个通道(特征)的图像。所以说卷积是一个特征提取的过程,从低维的特征中获取更高维的特征。
理解了多通道卷积的原理,那么它具体的计算过程是怎么样的呢?
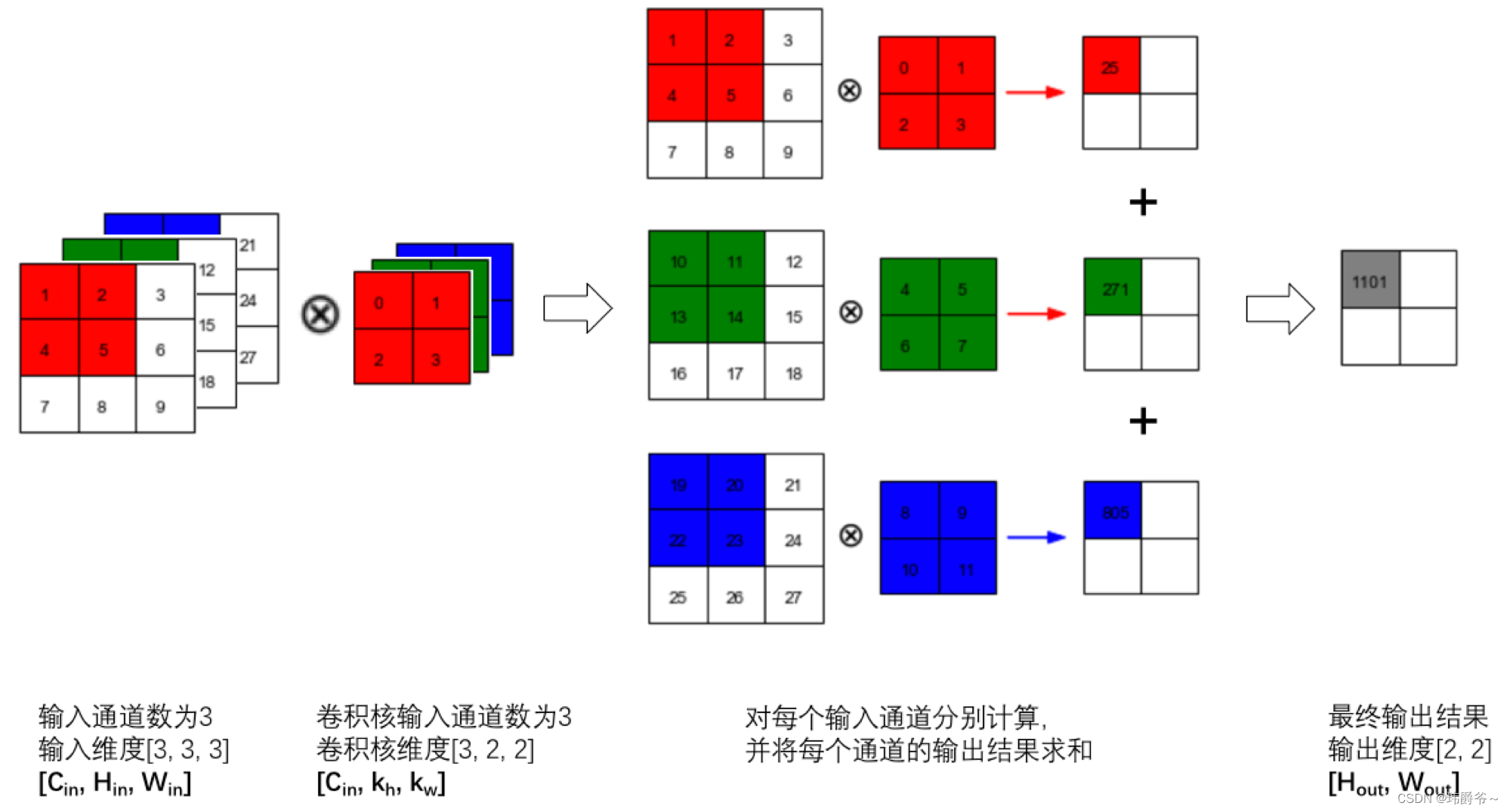
图片来自网络
如这张图所描述的,其实是每个通道分别进行卷积,然后把每个通道结果上相应的位置加起来。所以卷积核的通道数是要与原图的通道数一致的。
我们都知道卷积是会使图像尺寸减少的,那么我们如何计算结果图的尺寸呢?这里有一个公式:
Output_w=(original_w-kernel_size+2*padding)/stride+1
Output_h=(original_h-kernel_size+2*padding)/stride+1
其中output是输出的意思,original是原图的意思。
拿刚才的一幅图作为例子:

在这张图中,原来的图像尺寸为6*6,卷积核的尺寸是3*3,padding为1,stride为1。那么输出尺寸就是:(6-3+2*0)/1+1=4,由于长和宽都一样,因此只需要计算一次便可以了。
值得注意的是,有些论文上并没有写padding是多少,只给了个原图尺寸、卷积核尺寸、步长和结果图尺寸,所以我们需要倒推出padding是多少
池化
池化其实和卷积很像,也是一个框框在那里扫描,但计算方法不太一样。
图片来自https://mlnotebook.github.io/post/CNN1/
比较常用的有平均池化和最大池化,顾名思义,就是取扫描区域里的最大值或者平均值为输出值,如下图。
值得注意的是,池化的步长一般与核的尺寸相同,也就是扫描框框不会相互覆盖。
Pytorch实战
import torch.nn as nn # 引入pytorch
conv=nn.Conv2d(in_channels=3,out_channels=8,kernel_size=3,stride=1,padding=1) # 定义层
out=conv(x) # 使用层其中的参数:
in_channels是指原图的通道数
out_channels是指输出图的通道数
kernel_size是指卷积核尺寸
stride是指步长,默认为1
padding是补零,默认为0
还有些其他参数,用得不多,这里就不介绍了。
然后我们再实现一下池化层
import torch.nn as nn # 引入pytorch
pool=nn.MaxPool2d(kernel_size=2,stride=2) # 定义层
out=pool(x) # 使用层kernel_size是指卷积核尺寸
stride是指步长
还有些其他参数,用得不多,这里就不介绍了。
作者:公|众|号【荣仙翁】
内容同步在其中,想看更多内容可以关注我哦。


















 2184
2184

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









