





简介:PubMed属于NIH,是一款学术搜索引擎,主要内容为医学数据库。
MeSH检索:
原理:
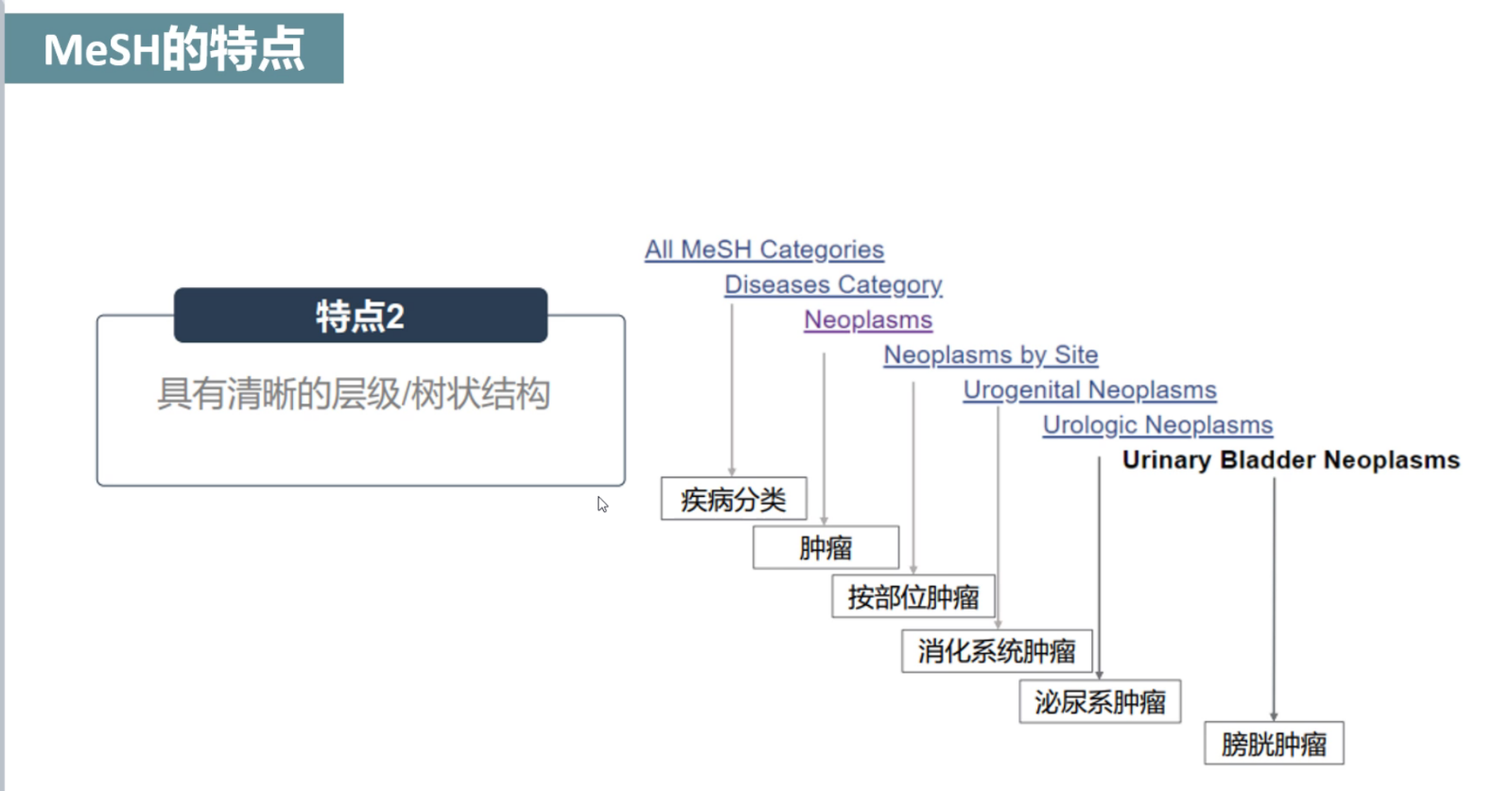
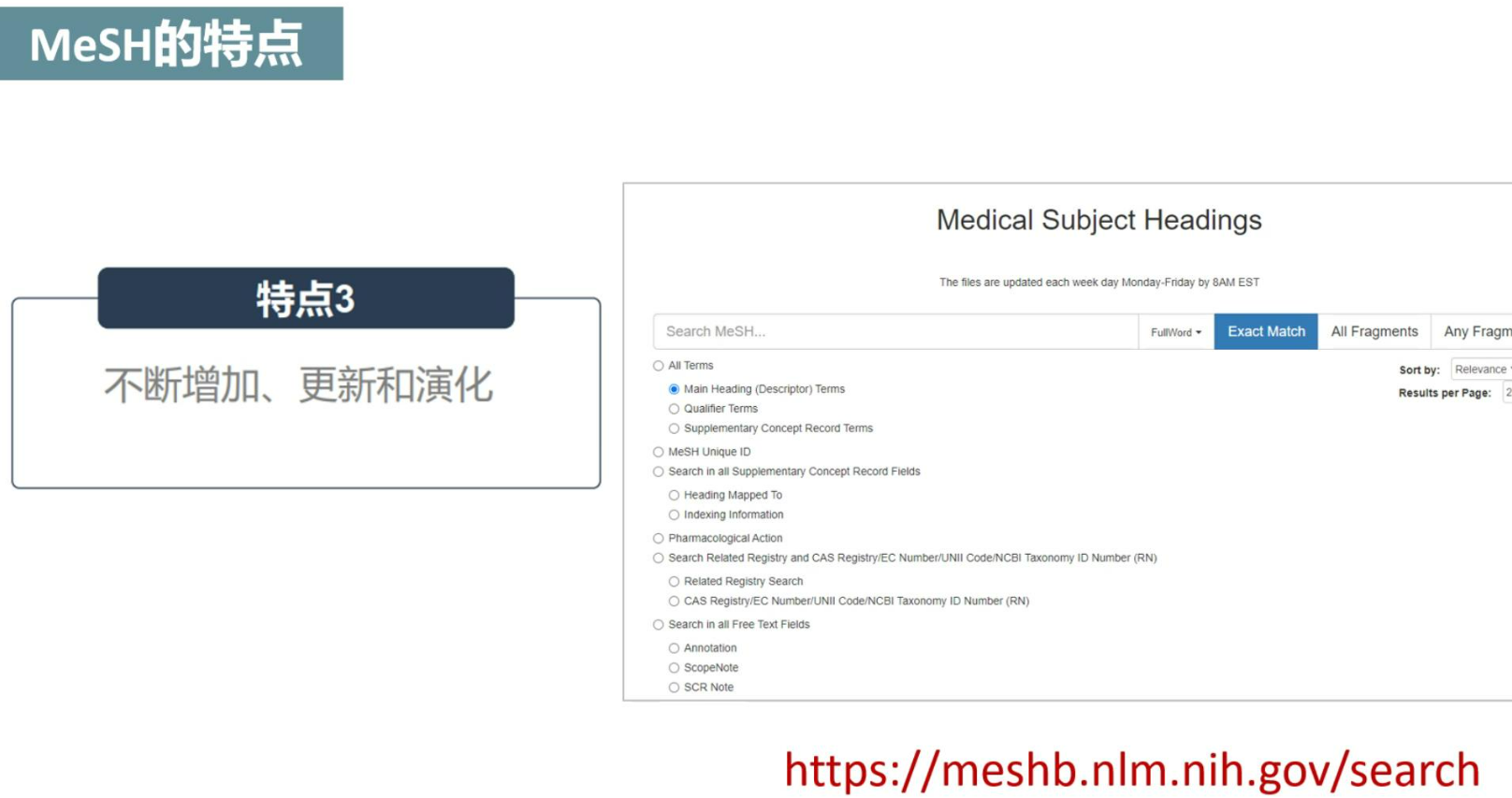
MeSH(Medical Subject Headings)是包含2万以上个术语的词汇表,每年更新一次,用于描述PubMed文献的主题。
功能:
ATM:词汇自动转换
可在检索历史中查看检索词
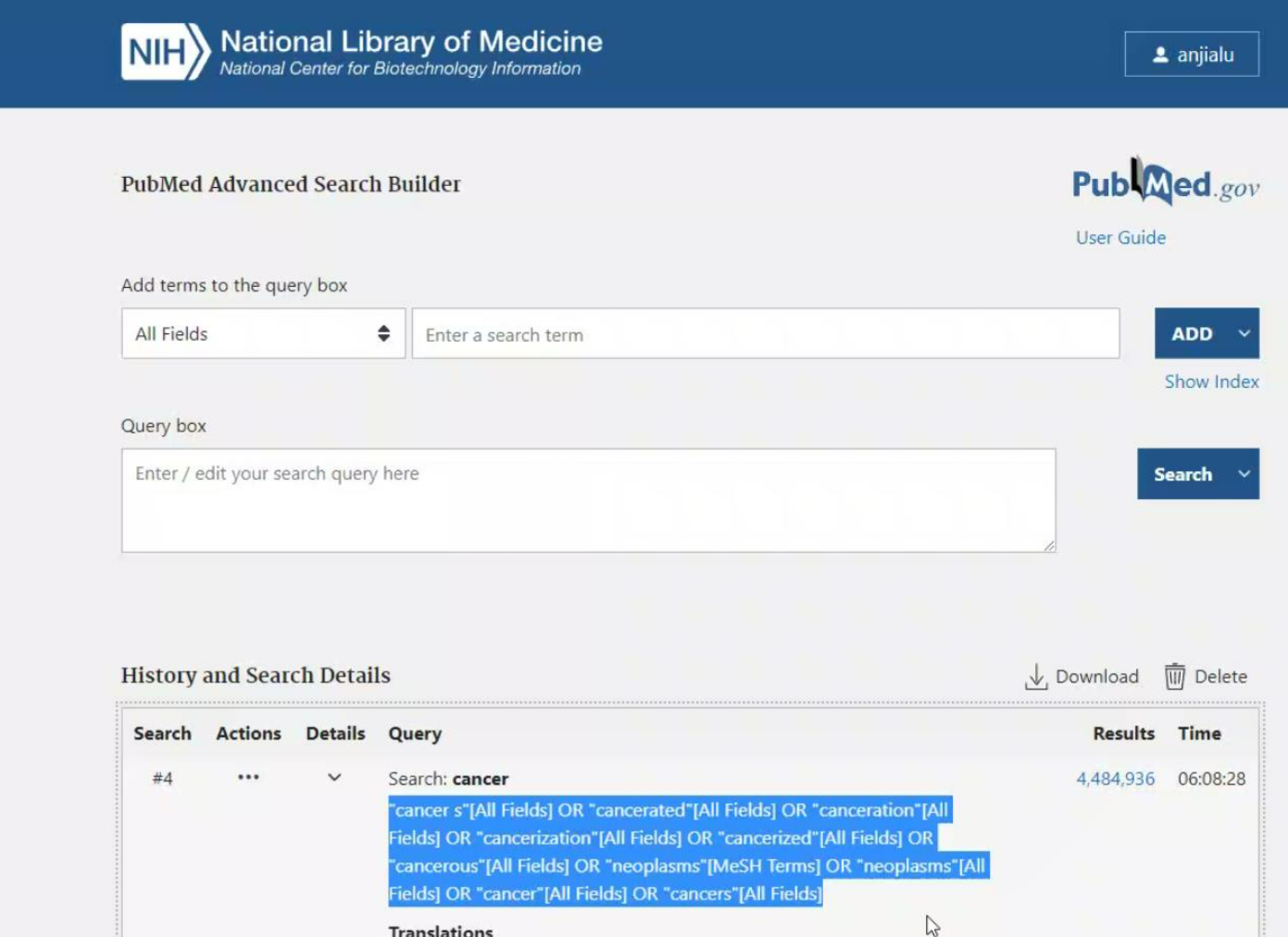
只要输入一个检索词,就会自动关联相关主题词:
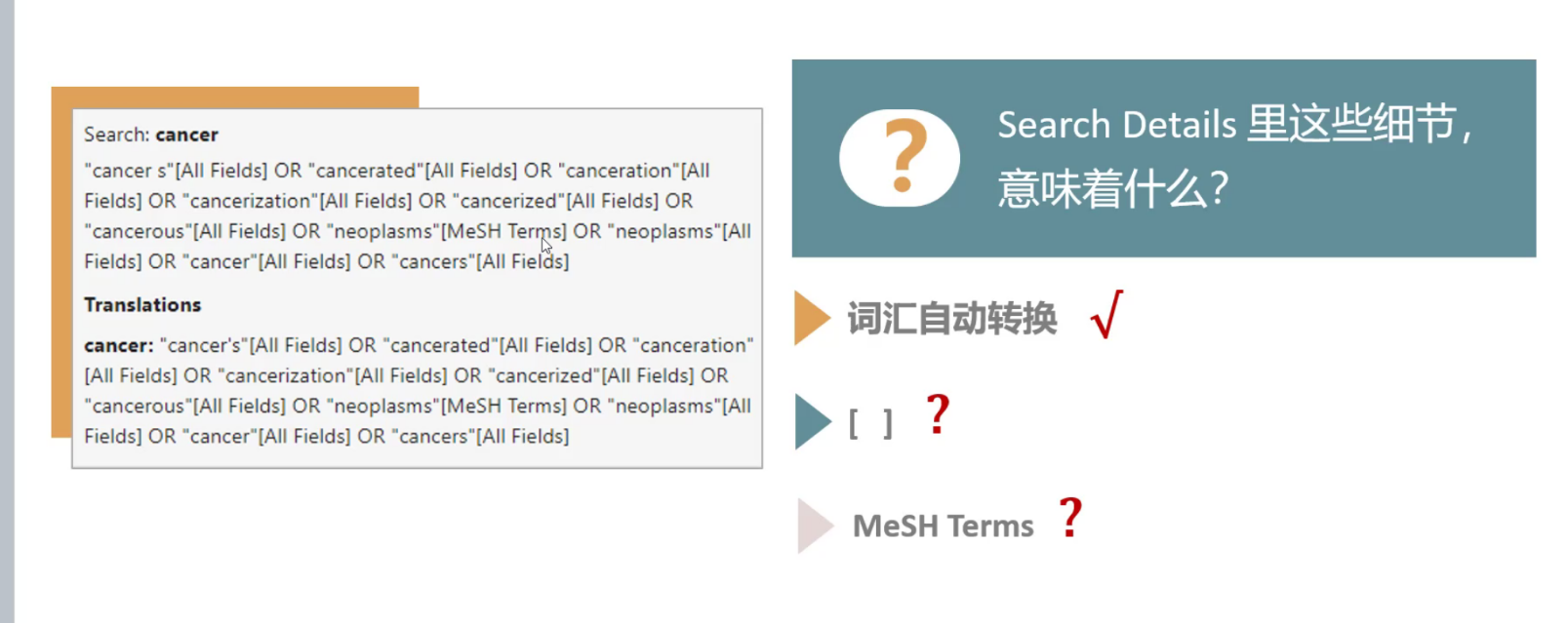
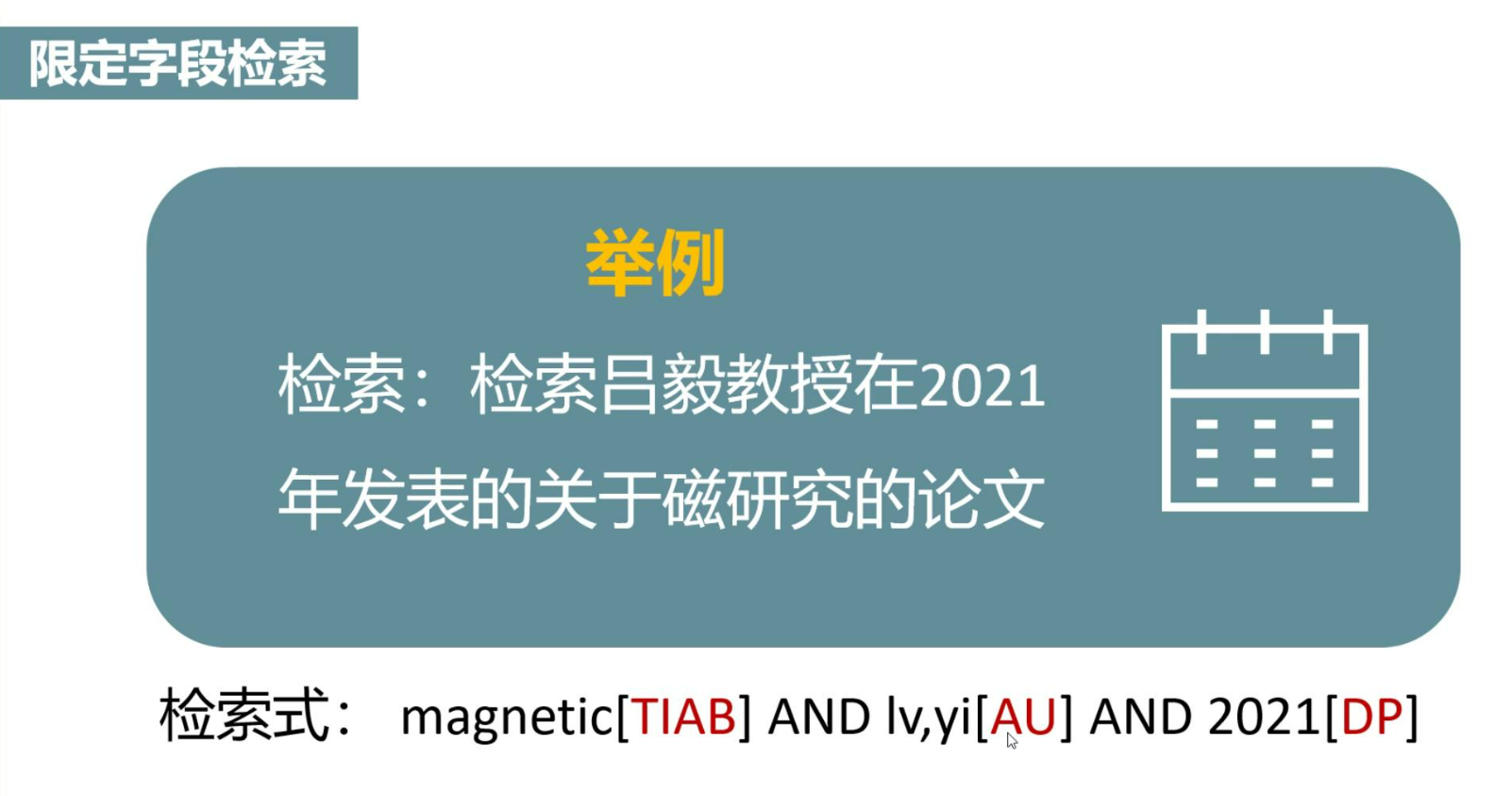
问:方括号[]是做什么的?
答:限定字段检索。

[AU]作者
[DP]出版时间
…
属于高级检索
问:MESH是什么?
答:合并同义词

检索MESH网站:
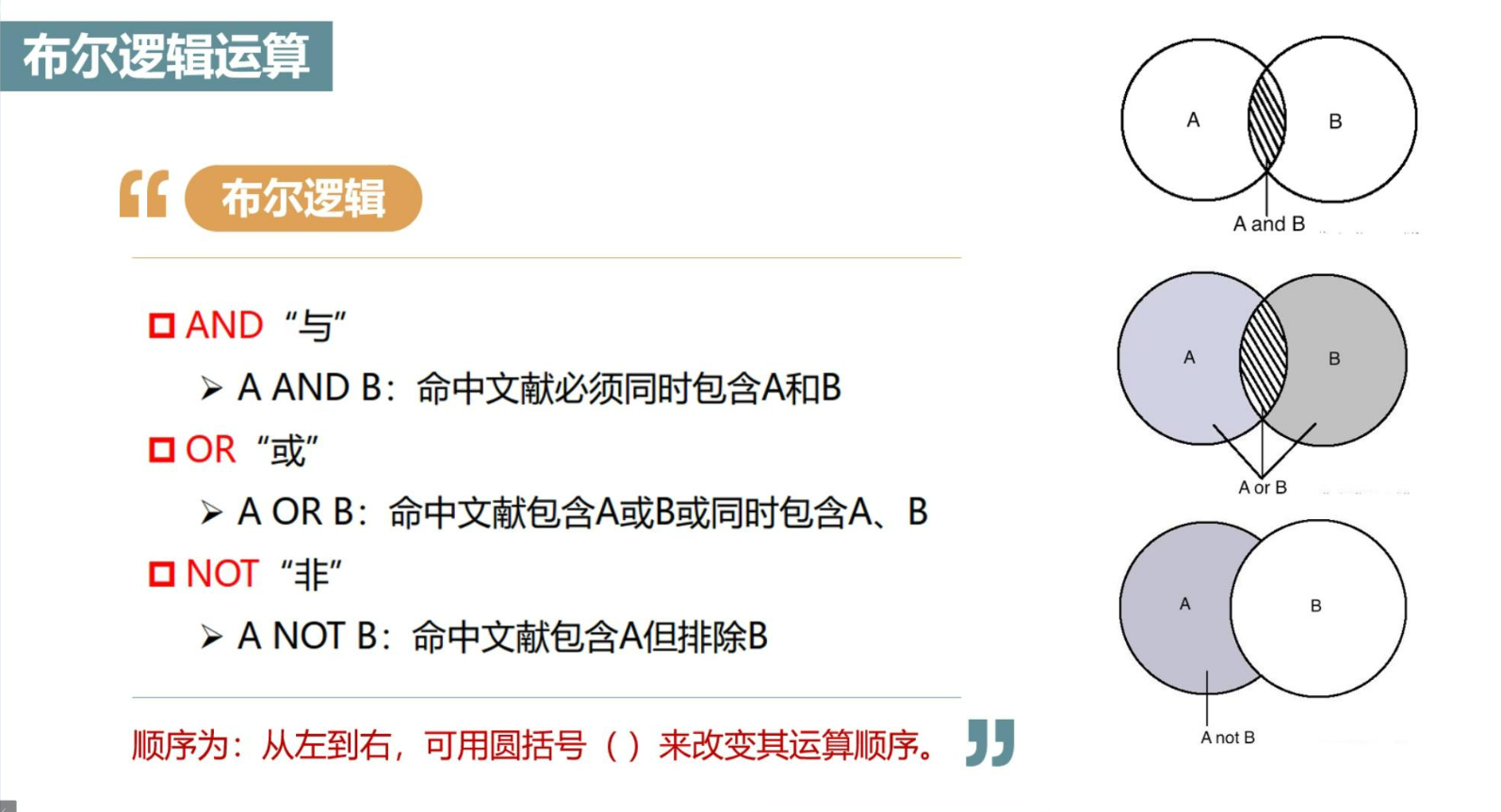
 逻辑运算符:
逻辑运算符:
AND OR
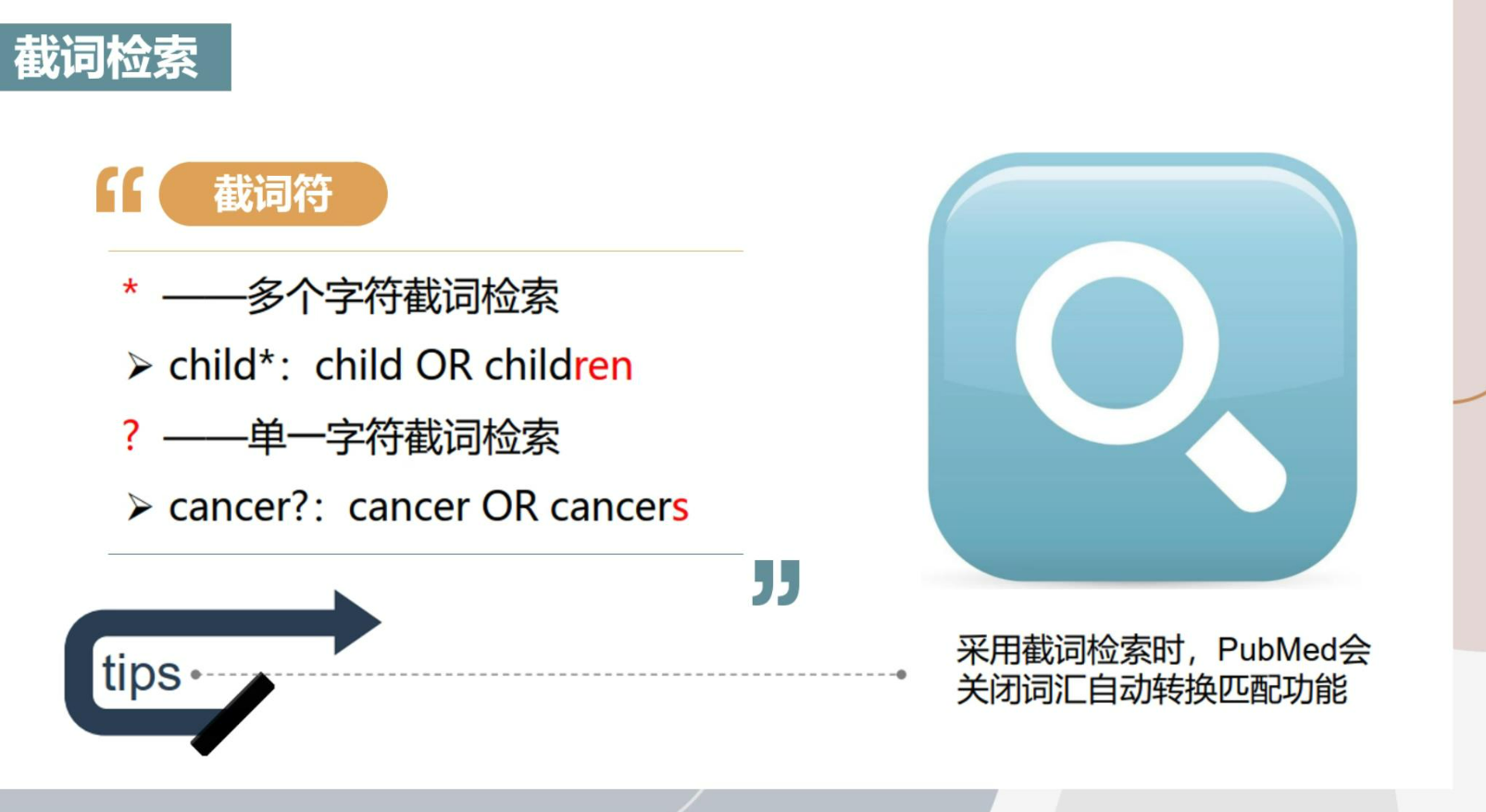
 通配符:*
通配符:*
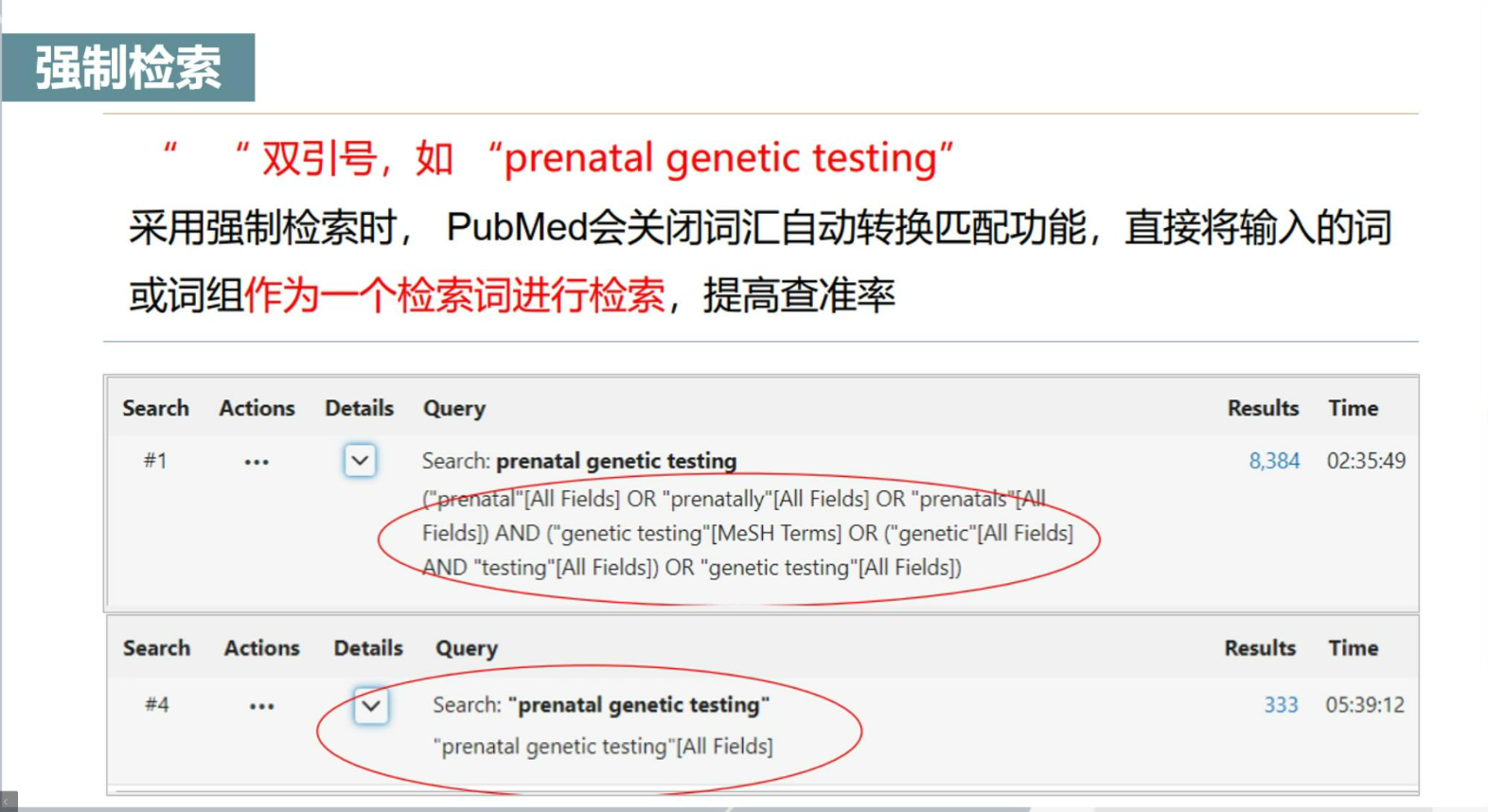
强制检索:
限定检索词
会关闭自动转换匹配功能
以下几种检索都会关闭转换匹配:
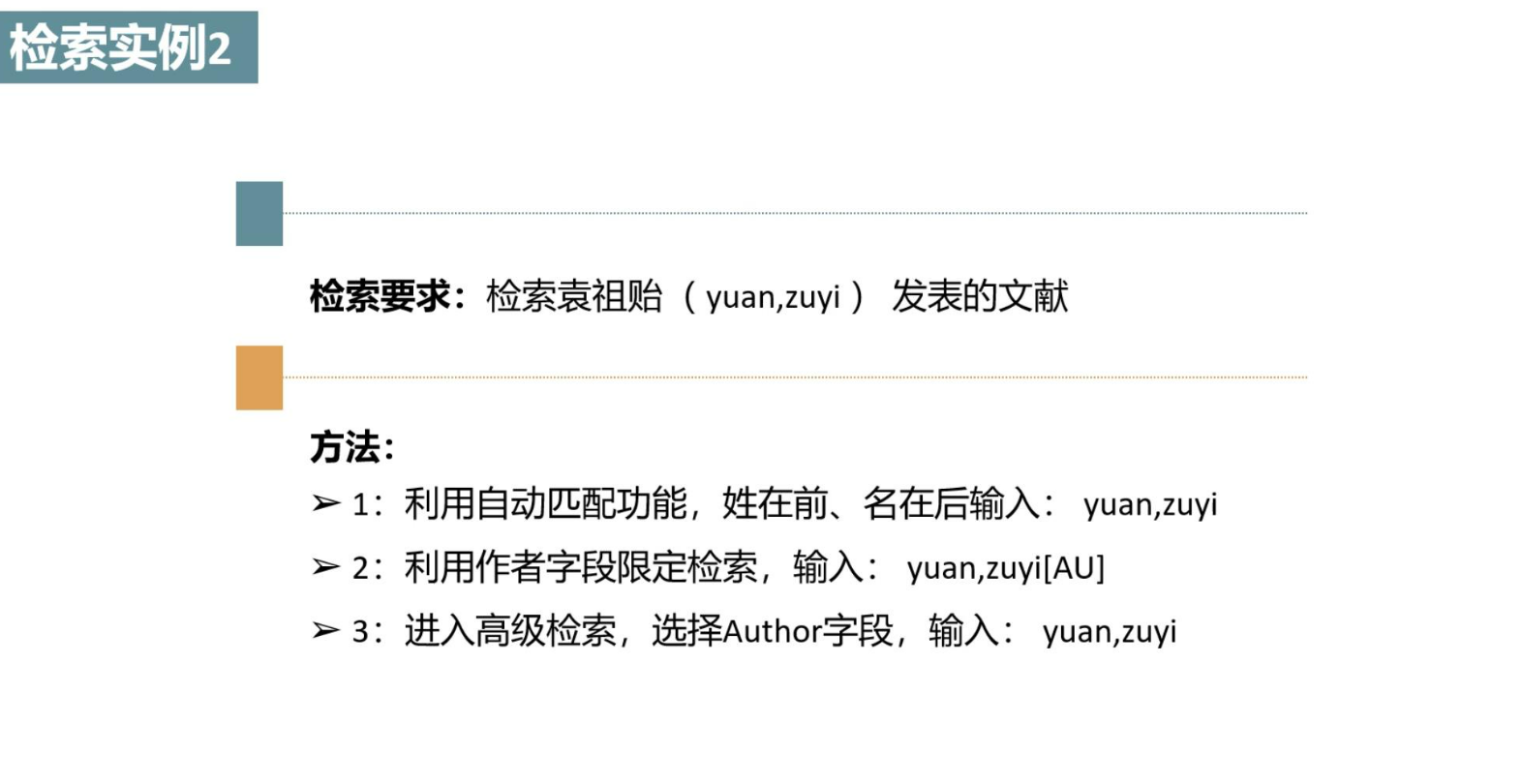
检索指定作者:
姓在前名在后
结果精炼:
改变结果显示优先级
最相关/最先发表
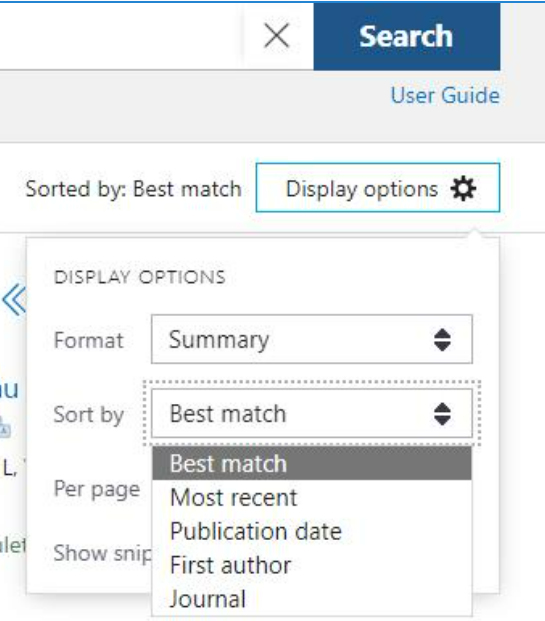
filter 进一步过滤结果
截词符:
HIV NOT child*
检索HIV但不要儿童相关
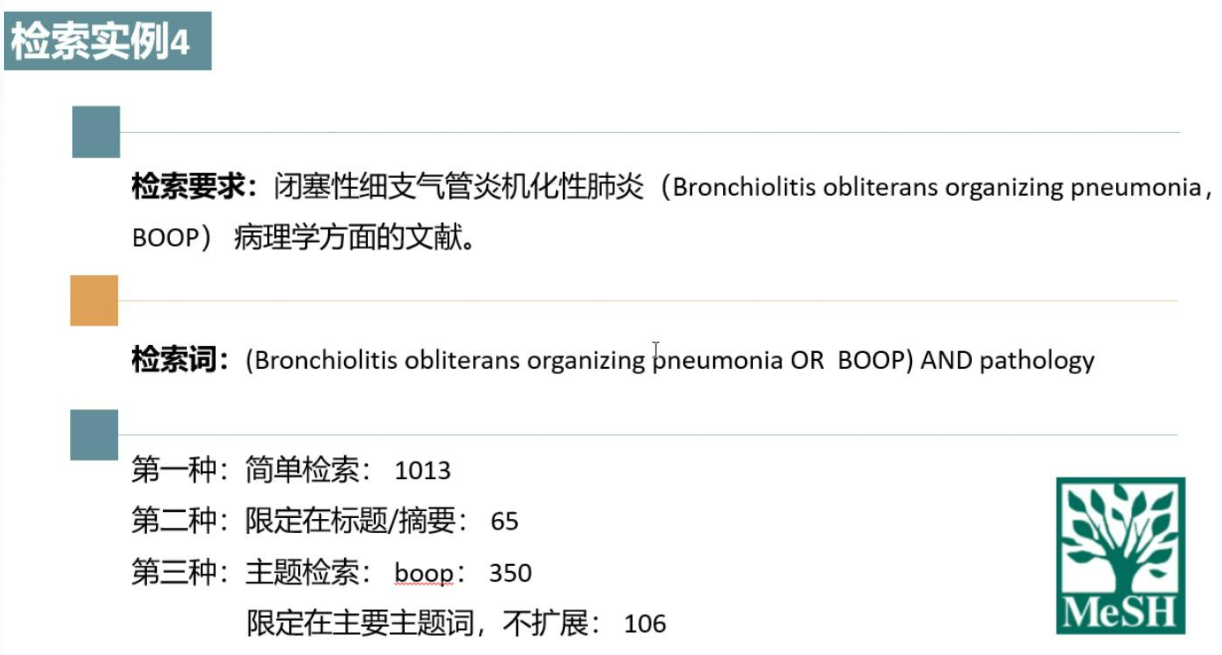
全称加缩写 再加上病理
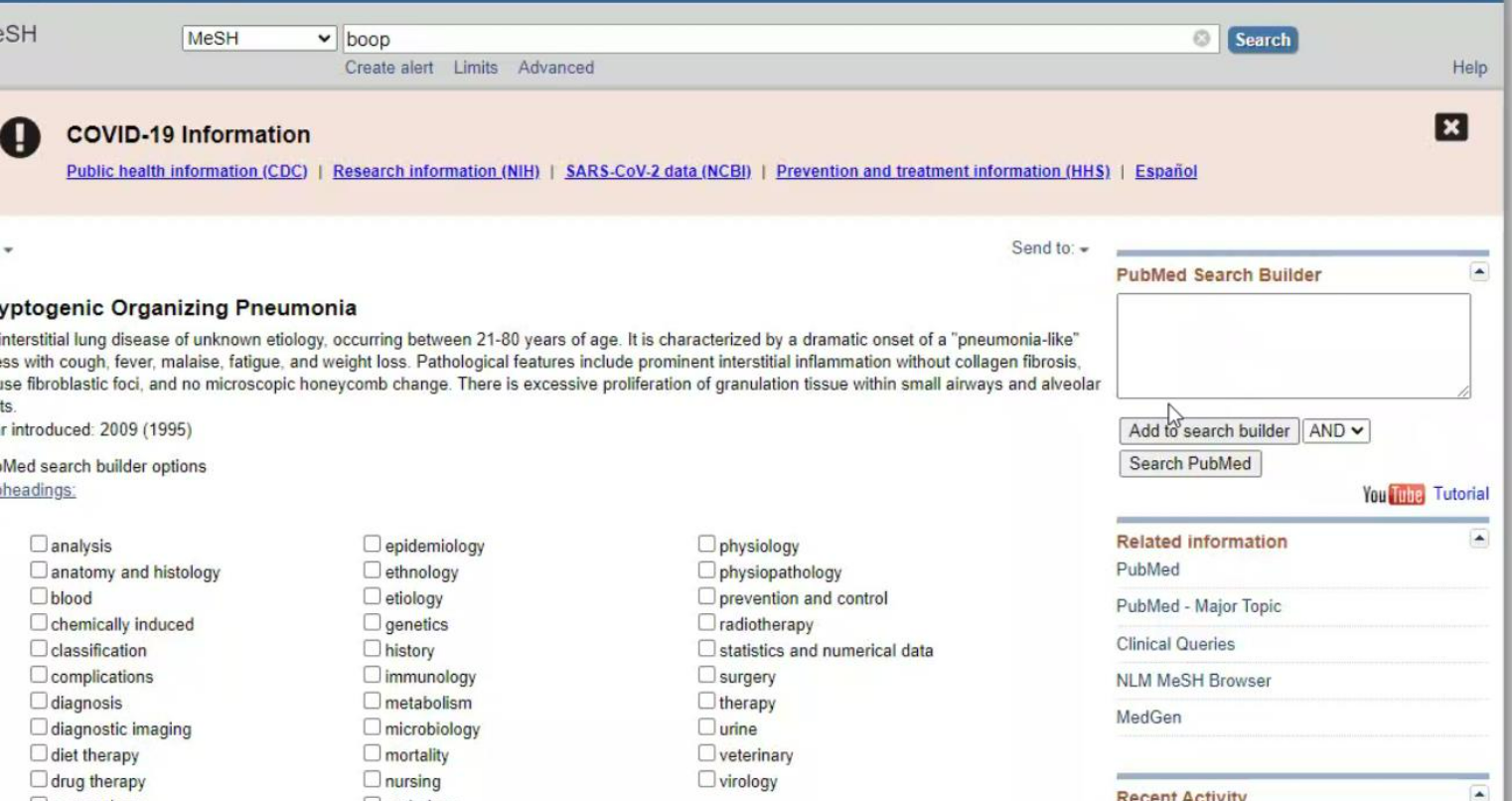
MSEH检索地址:
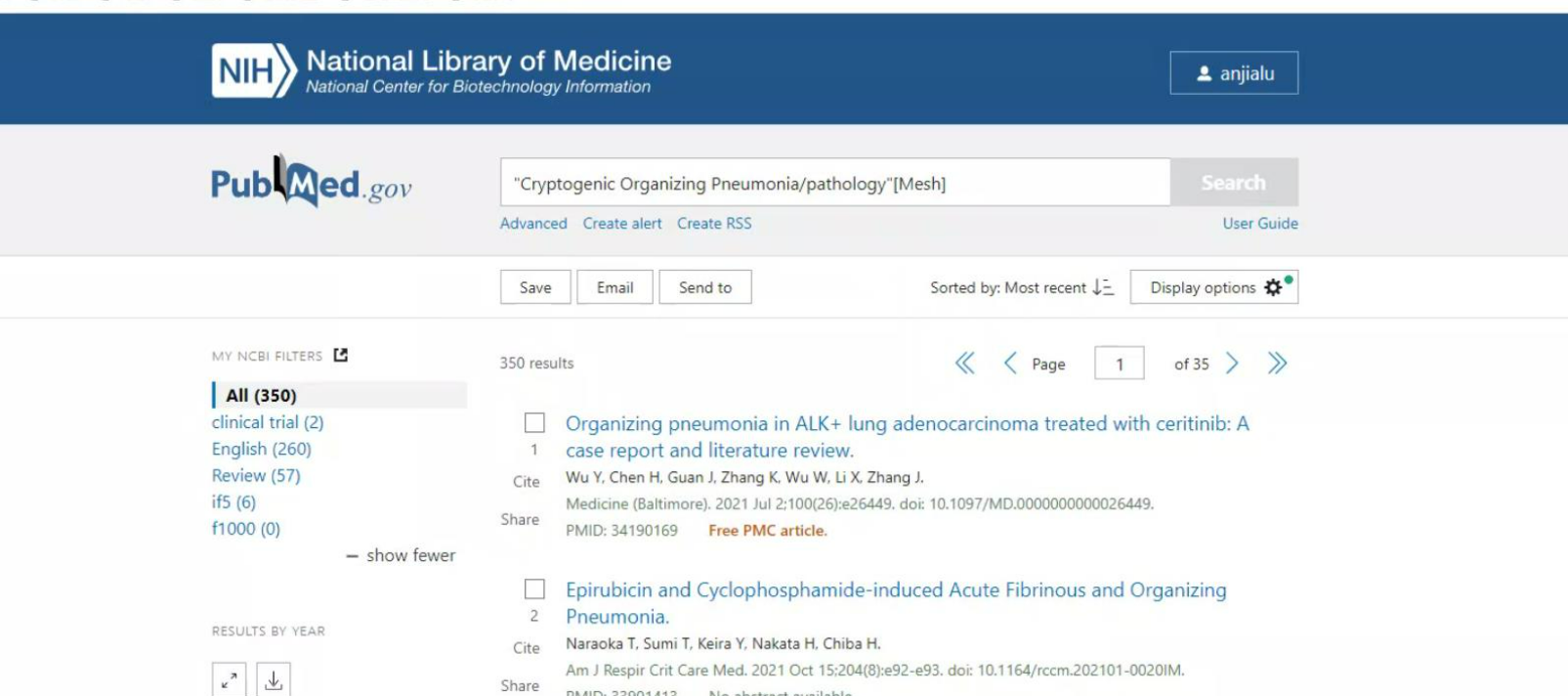
MSEH检索
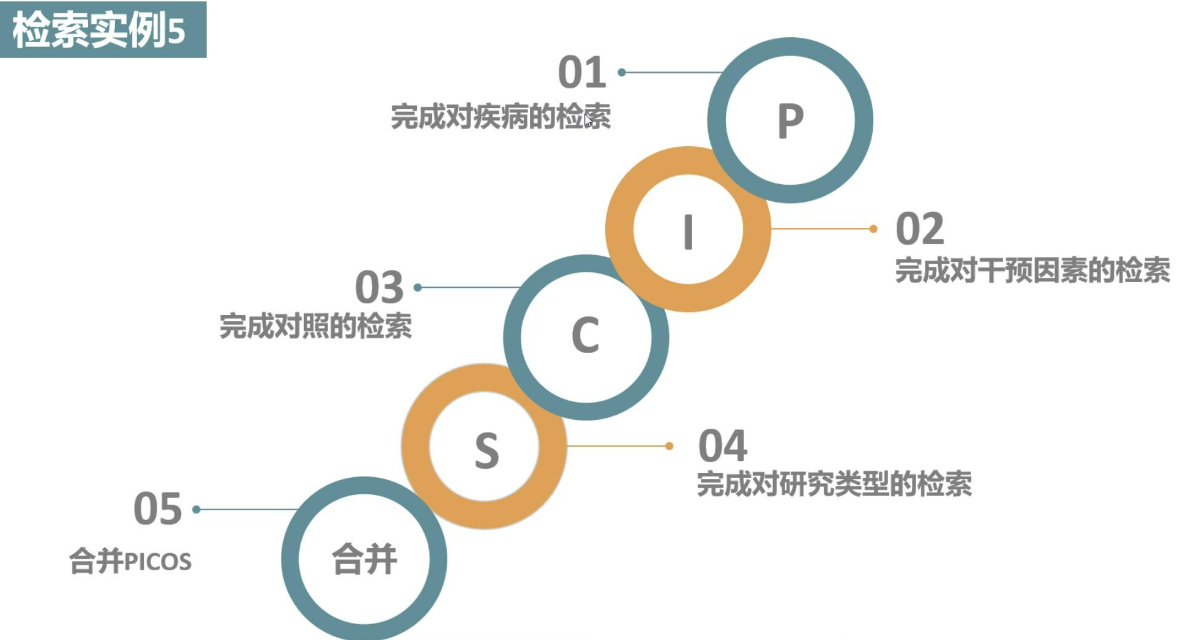
PICOS思路
通过自由词 放在mesh中
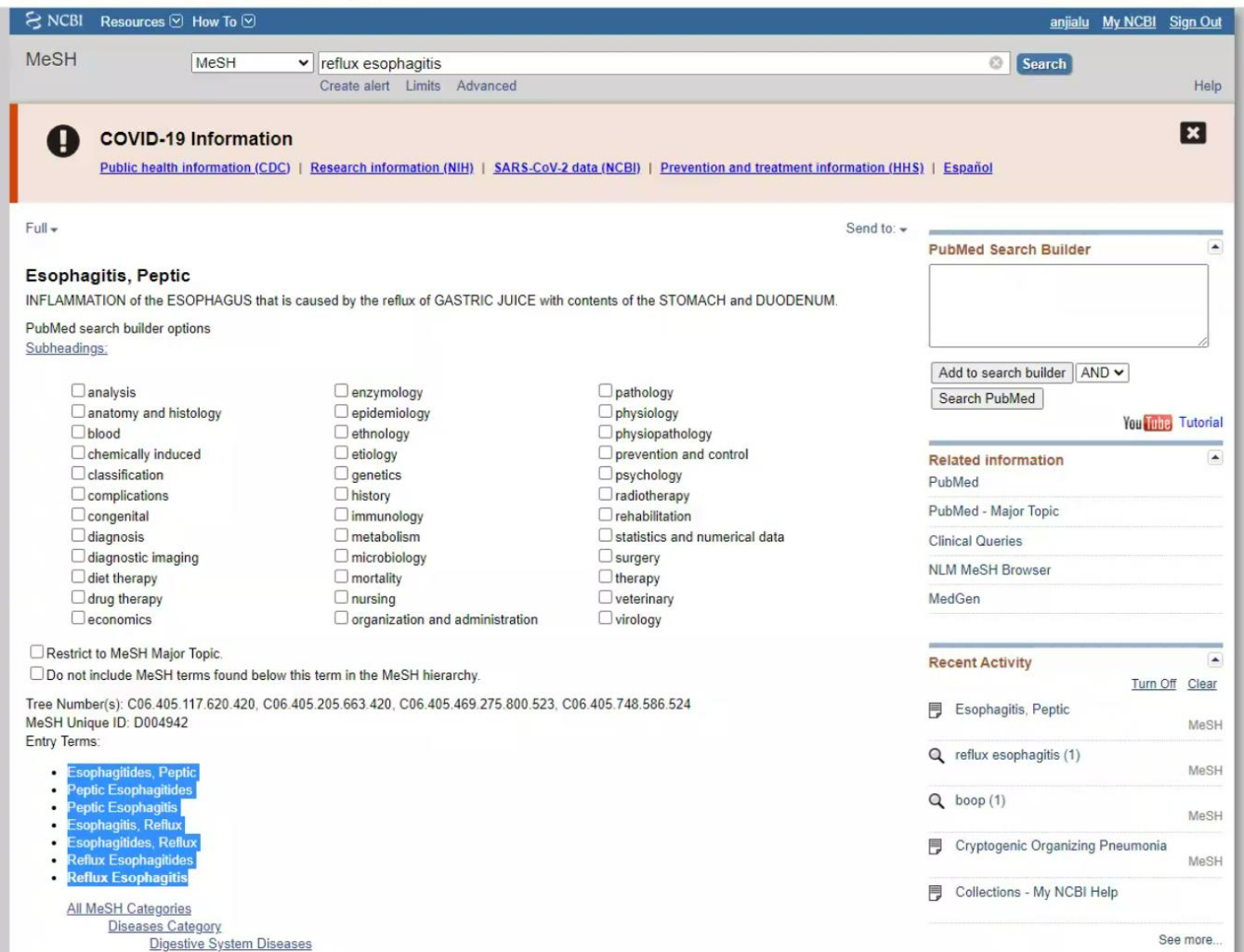
查看同义词
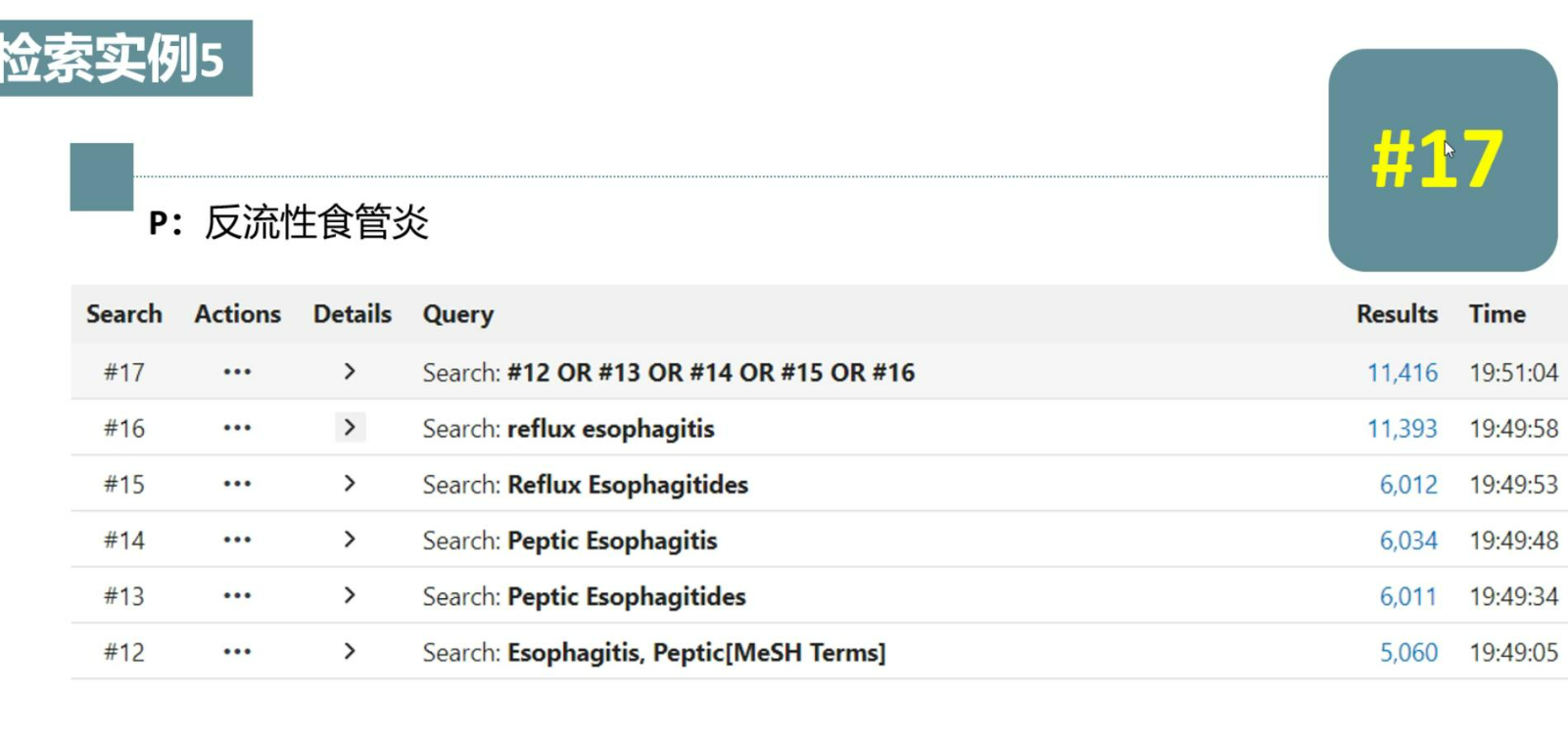
分别添加不同入口词,再用 OR 连接起来
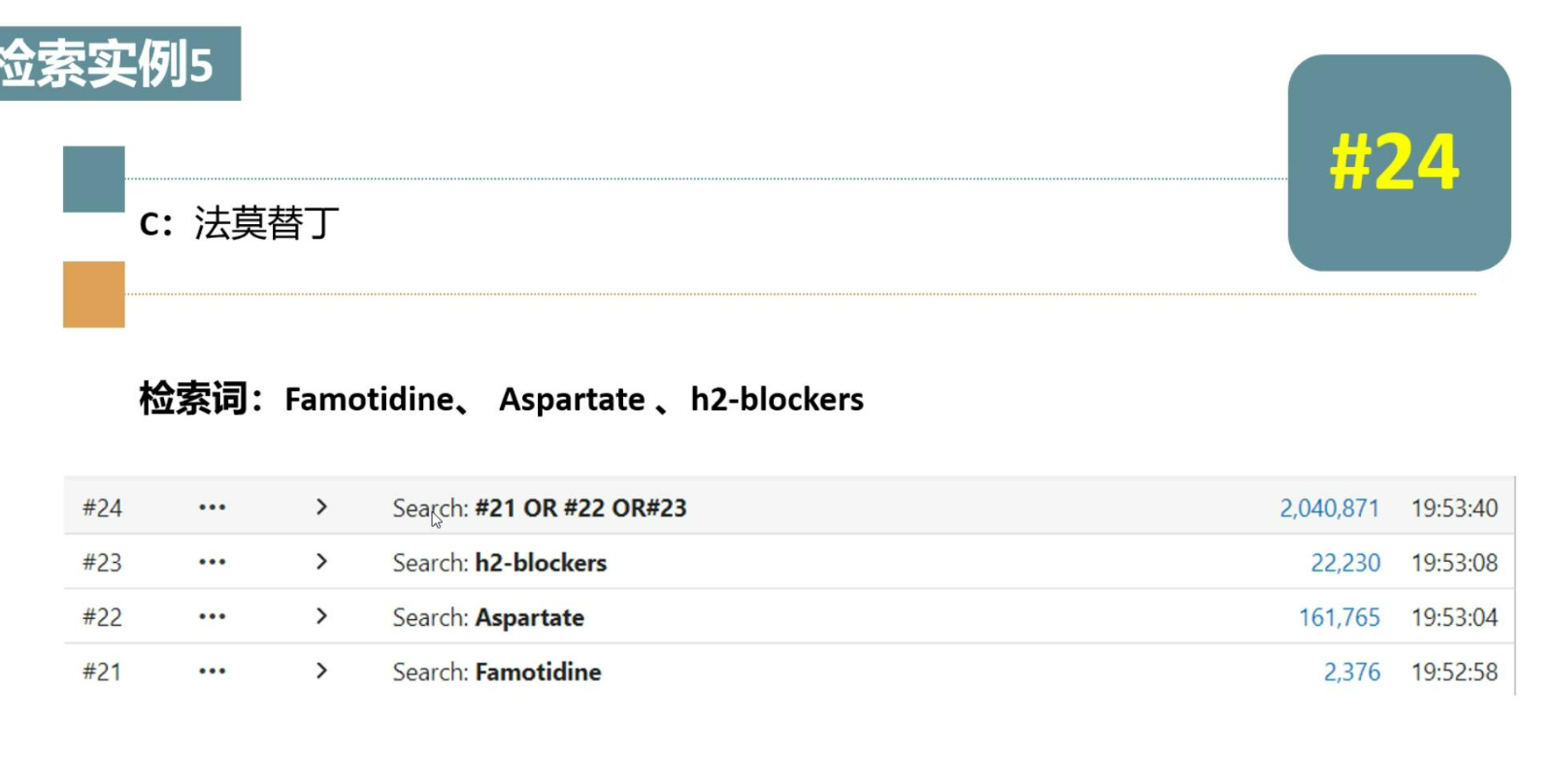
PICOS 连接 C
S:研究设计
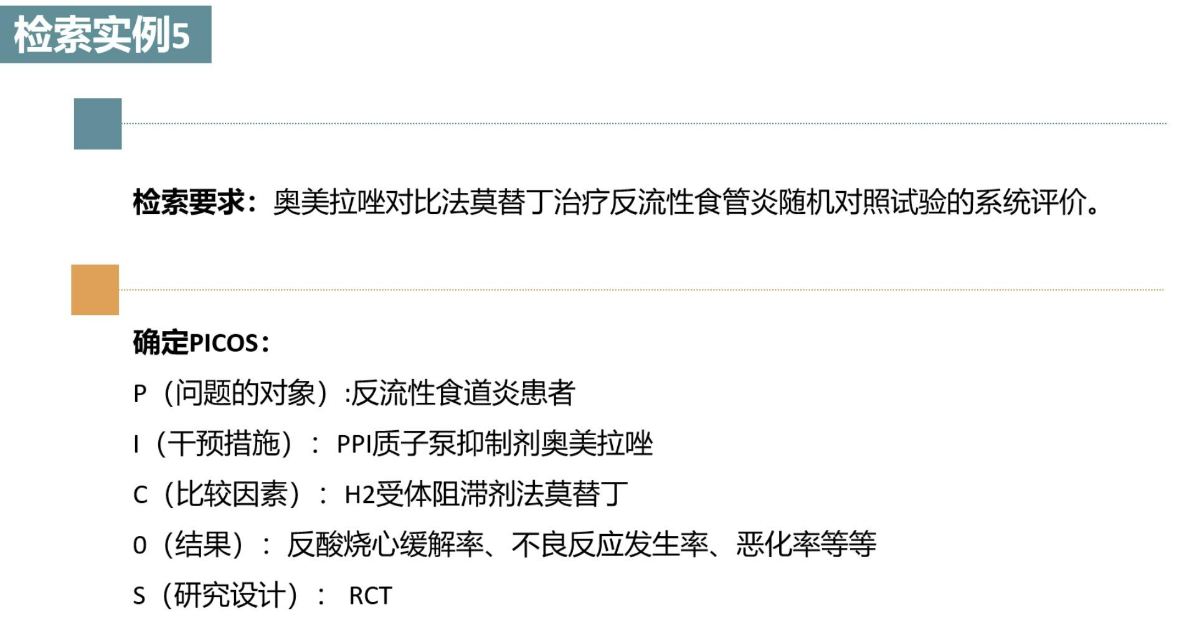
P(Population/Participants):特定研究人群或临床问题,如“绝经前子宫肌瘤患者”。
I(Intervention):干预措施,如“抗利尿激素治疗”或“子宫动脉栓塞术”。
C(Comparison):对照措施,如安慰剂或无治疗。
O(Outcome):关键结局指标,需区分主要(如生存率)和次要(如生活质量)。
S(Study design):研究类型,如随机对照试验(RCT)、队列研究等。
需要revman软件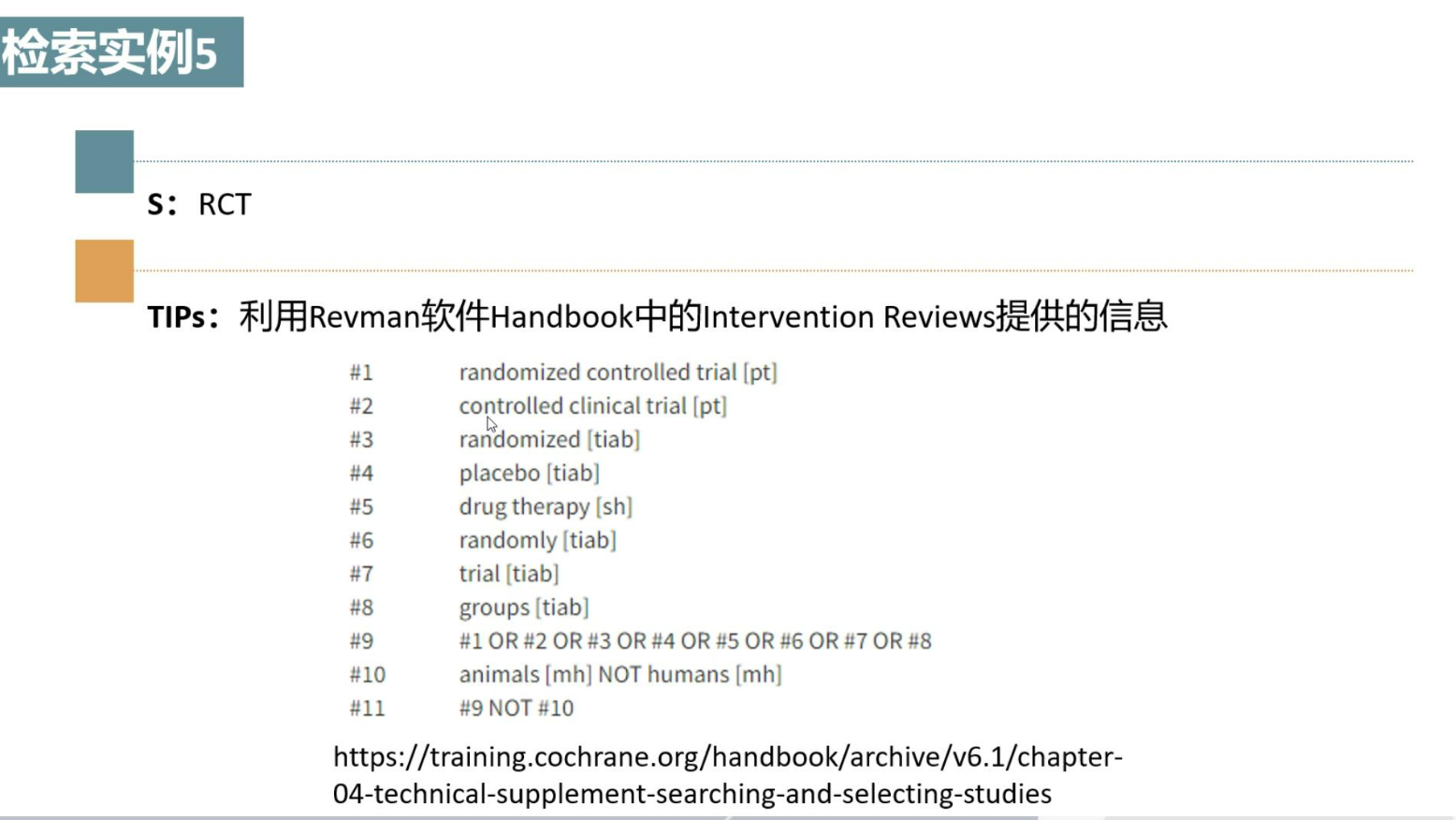
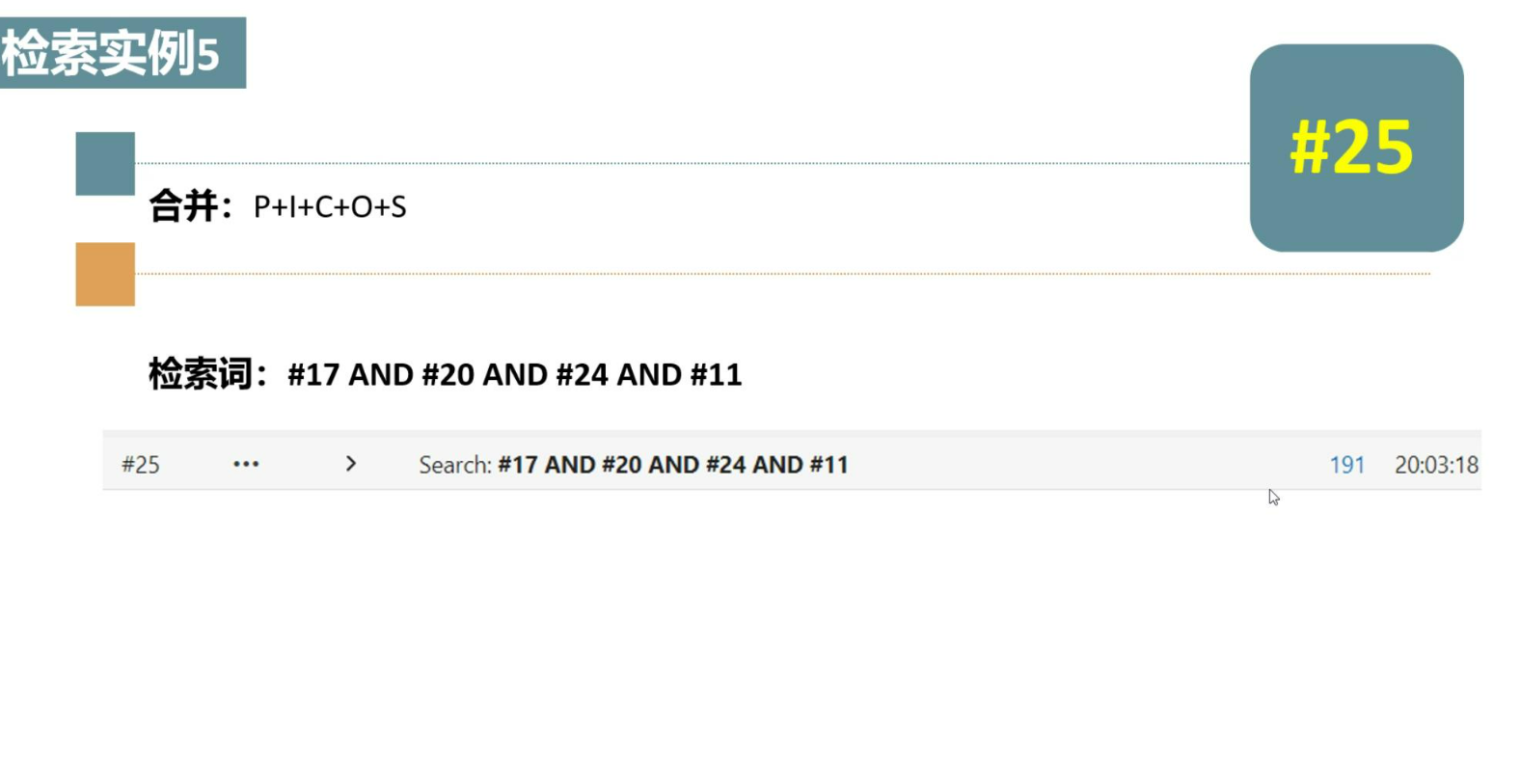
最后精简结果:将上面PICOS的每一步结果用AND连接起来
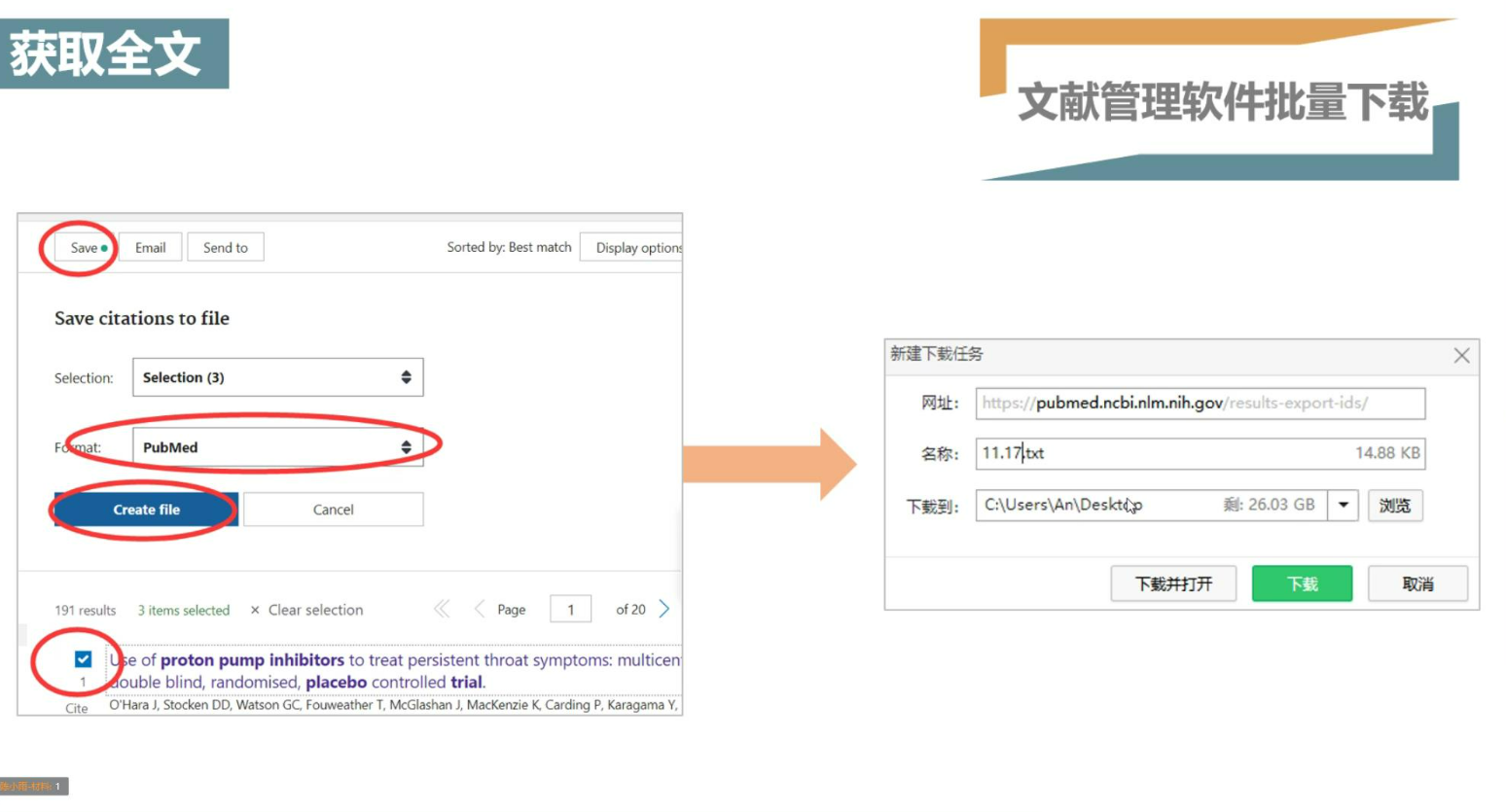
文献管理软件批量下载:

插件法:Scholarscope,EasyPubmed
检索结果可保存.

查全与查准:
查准率【精度】 是衡量某一检索系统的信号噪声比的一种指标,即检出的相关文献量与检出的文献总量的百分比。
查全率【召回率】,是衡量某一检索系统从文献集合中检出相关文献成功度的一项指标,即检出的相关文献量与检索系统中相关文献总量的百分比。
需要折中平衡(trade off)。
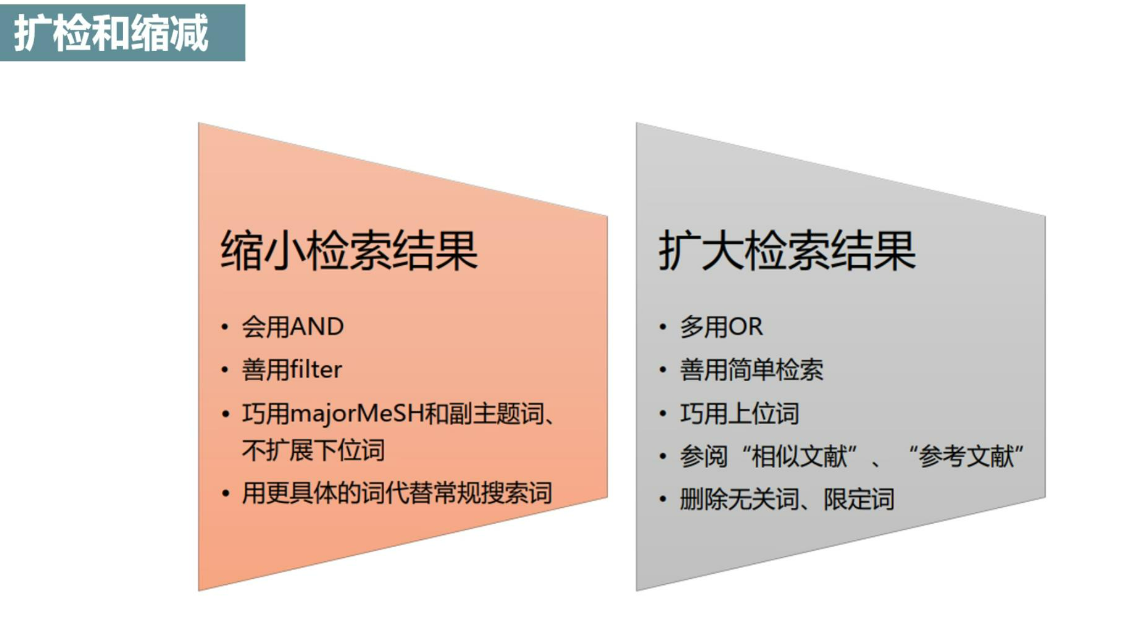
善用filter,层层过滤。
总结:



















 4632
4632

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











