



 滴滴地图采用AR实景导航技术,解决大型场站内GPS信号弱、路线复杂的难题,提升司乘体验。通过图像定位和惯性导航,实现精准的室内定位和导航规划,已在郑州机场等多地应用。
滴滴地图采用AR实景导航技术,解决大型场站内GPS信号弱、路线复杂的难题,提升司乘体验。通过图像定位和惯性导航,实现精准的室内定位和导航规划,已在郑州机场等多地应用。

桔妹导读:滴滴AR实景导航服务继9月4日正式上线郑州机场引起强烈反响后,9月10日作为谷歌ARCore明星应用之一惊艳亮相2019谷歌开发者大会(Google Developer Days,简称GDD),并分享开发经验。
在大会上,滴滴地图首席工程师胡润波代表滴滴地图团队分享了打磨超过两年的AR实景导航的研发过程,介绍了使用新技术手段来提升用户出行体验的相关经验,并首次公开展示安卓场景下的AR实景导航服务。

演讲尾声,谷歌ARCore团队与滴滴联合制作的AR实景导航介绍视频首次发布,现场有超过千人同时观看,播放结束后会场内响起一阵热烈的掌声。

滴滴地图、战略合作部、国际化团队成员
与Google总部ARCore团队成员进行深入交流
据悉,这项火爆了现场的黑科技目前已经在国内的一些机场、火车站和大型商场上线,用户在使用滴滴平台并使用推荐上车点发单成功后,端上会显示“AR实景引导”按钮和卡片,即可使用AR导航服务。(目前支持iPhone 7及以上iOS手机和华为P20,P20 pro两个机型,后续会支持更多机型。)
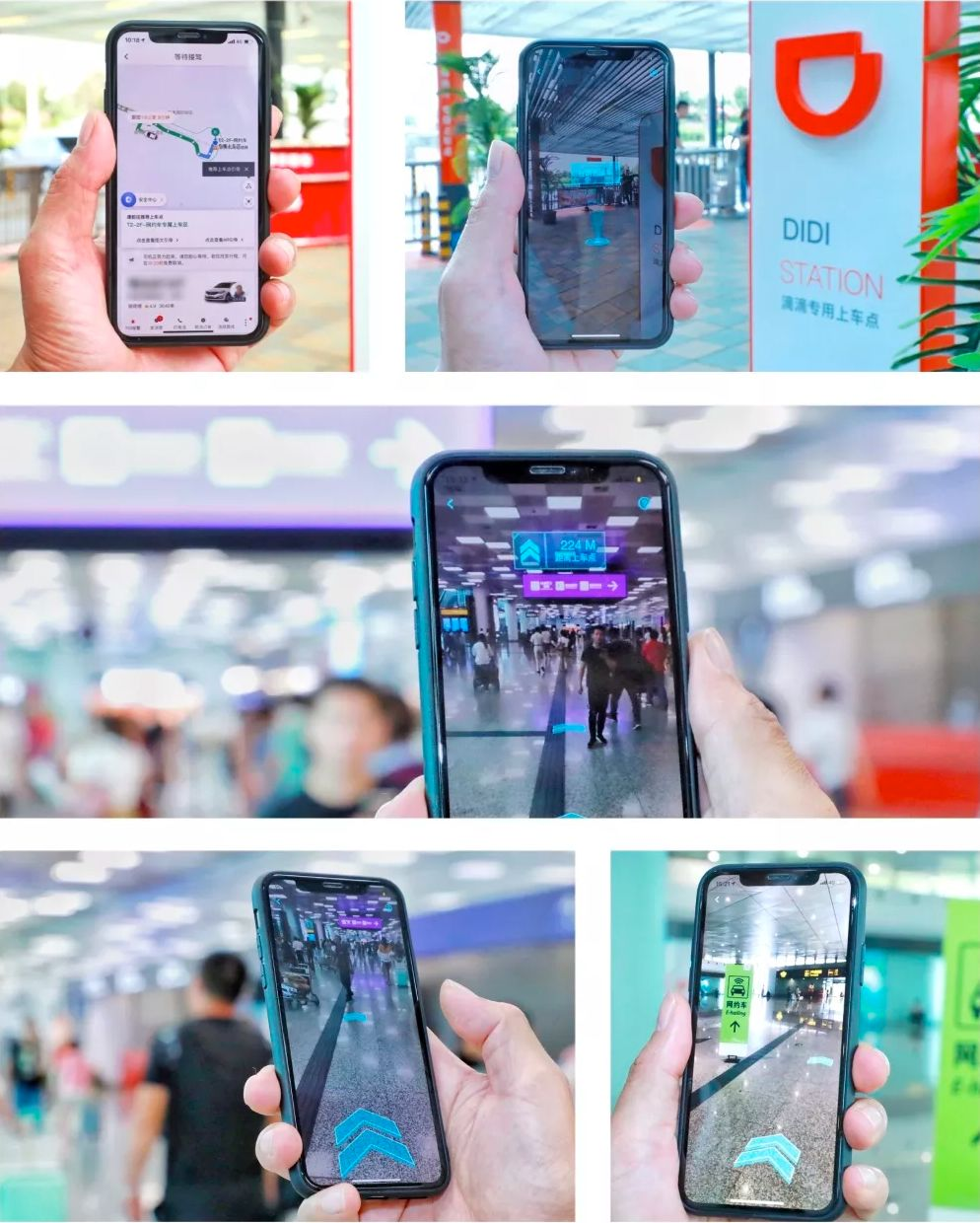
郑州机场T2航站楼“AR引导”教程
▍那么AR实景导航的开发初衷以及背后使用了哪些技术呢?
我们通过滴滴地图研发团队了解到,大型场站内GPS信号弱无法精确定位、加上场地面积大、路线复杂,造成一些机场、火车站、大型商场等区域的司乘会面成本高,降低了司乘体验和接驾效率。为解决大型场站司乘会面的痛点,地图团队尝试利用图像定位和惯性导航相结合的AR导航技术引导乘客,在精确定位出乘客位置后,通过沉浸式的箭头和路标等虚拟元素指引乘客轻松找到推荐上车点。
在AR导航中,解决了三大终极问题:我在哪里?我要到哪里去?我怎么去?这三点分别对应三个关键技术:建图、定位、和导航规划。建图是指事先通过数据采集将场站场景还原;定位是指通过简单交互准确知晓用户位置;导航规划则是通过路径规划和友好交互方式使得用户快速方便抵达到上车点。其核心技术贡献在于:
第一,通过技术创新解决了大规模室内场景三维建模问题,提出了连续帧优化、数据关联优化等策略突破了学术界中对单目视觉建模场景大小的限制,成功构建出了超过6万平米室内模型,有效地构建了高精度的室内地图;
第二,采用了单目图像视觉定位方案,基于图像匹配技术和视觉定位算法快速计算出用户的位置,通过在数据检索等方向的创新,达到了平均定位误差小于0.5米的精度,是GPS定位误差的1/30;相比WiFi、蓝牙和超宽带等其他室内定位技术而言具有明显优势;
第三,通过融合惯性导航传感器数据实现基于AR的视觉渲染和交互方案,使得用户交互更加友好、AR技术的展示更加流畅,为用户清晰、准确、无歧义地提供引导路线。在安卓版本中,调用了谷歌ARCore来辅助实现这一功能。根据演示,使用AR导航在手机上可以实时标注前进方向以及道路上的实景状况,引导用户到达目的地。该方案在各大场站上线后,已得到用户的大量好评,为解决场站司乘会面难的痛点贡献了重要力量。
▍最后,让我们来一睹谷歌ARCore团队与滴滴联合制作的AR实景导航视频吧
推荐阅读
▬
更多推荐
▬
滴滴开源 / Open Source
Levin | AoE | Delta | Mpx | Booster | Chameleon | DDMQ | DroidAssist | Rdebug | Doraemonkit | Kemon | Mand Moblie | virtualApk | 获取更多项目
技术干货 / Recommended article
重磅!滴滴跨端框架Chameleon 1.0正式发布 | Android 性能优化之 Activity 启动耗时分析 | HDFS 源码解读:HadoopRPC 实现细节的探究| 阅读更多内容


















 1012
1012

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









