



在养老与康复赛道,硬件堆料的时代已经过去,真正缺的是“可落地、不折腾、能生长”的智能化方案。本文把最近在社区里小规模验证的一套“外挂式”升级思路梳理出来:不拆机、不破坏原有电气安全,仅通过一块 Deepoc 具身智能外拓板,就让传统电动轮椅获得体温、心脉监测、自主避障、姿态调节等高级特性。整套方案开源了通讯协议与示例工程,已在 3 家康复机构完成 200+ 小时稳定运行。下文不谈参数,只聊设计思路与踩坑经验,希望能帮更多同行少走冤枉路。
一、为什么要“外挂”而不是“重构”
1. 存量市场远大于增量
国内电动轮椅年销量百万级,但 80% 以上的存量设备仍停留在“电机+摇杆”的原始形态。换整机成本动辄过万,机构和个人都吃不消。
2. 合规壁垒
医疗级轮椅一旦动到主控、电池、刹车系统,就要重新跑 NMPA 认证。外挂板通过“只读不写”的监听策略,既拿到数据,又规避安全责任。
3. 用户心理
老人对“改装”天然抵触。外挂板像手机壳一样扣上去,十分钟完成安装,家属更愿意尝试。
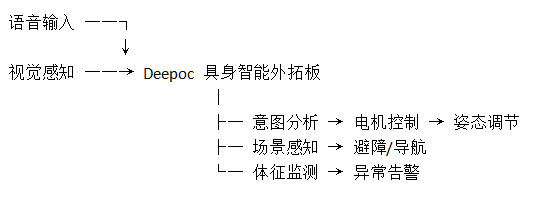
二、系统拓扑:把轮椅当成“可移动机器人底盘”
体征监测采用独立 MCU 采集,通过 UART 透传至外拓板,主控只做数据融合,不直接驱动医疗传感器,避免电磁干扰。
电机控制采用“影子驱动”:外拓板并联在原有摇杆信号线上,解析用户意图后叠加修正量,而非切断原生链路。当外拓板掉电,轮椅立即退回纯手动模式,失效安全。
三、智能轮椅机器人的关键功能实现
非接触式健康监测系统
基于Deepoc开发板的智能轮椅配备了先进的生物信号采集模块,能够实现无感式健康监测。系统通过红外传感器和高精度光学组件,可在用户正常使用轮椅过程中,自动完成体温、心率、血氧等基础生理参数的测量,完全不需要用户主动配合。
测量数据会实时传输至Deepoc模型进行分析。模型不仅能够判断当前数值是否正常,还能结合历史数据识别潜在的健康风险趋势。当检测到异常情况时,系统会根据预设策略采取相应措施,如语音提醒用户、自动联系紧急联系人,甚至直接导航至最近的医疗机构。
基于大模型的智能语音交互
Deepoc模型集成了最新的大语言模型技术,使轮椅能够真正理解用户的自然语言指令和隐含意图。与传统语音助手只能执行固定指令不同,基于大模型的系统可以处理模糊、不完整的表达,甚至能从上下文推断用户真实需求。
例如,当用户说"这里有点闷"时,系统不仅能理解字面意思,还能结合环境传感器数据,判断是否需要开启轮椅的通风功能或建议移动到通风更好的位置。这种深层次的意图理解极大提升了交互的自然度和效率。
场景感知与自主决策
通过立体视觉摄像头和深度传感器的配合,智能轮椅可以构建周围环境的三维语义地图。Deepoc模型不仅能识别障碍物等基础信息,还能理解场景的深层含义,如区分医院走廊和公园小径,识别电梯按钮和自动门开关等。
这种高级场景理解能力赋予了轮椅一定的自主决策权。例如,在拥挤的走廊中,轮椅可以自动选择最优路径避开人群;当检测到用户长时间静止不动时,会主动询问是否需要帮助;甚至可以根据日程安排提醒用户即将到来的约会或服药时间。
四、语音与视觉的“时空对齐”实战
问题:老人说“带我去阳台”,但当下视觉里阳台门是关的,大模型该怎么办?
解决:
1. 语音侧输出“目标=阳台,优先级=高”。
2. 视觉侧实时检测“门状态=关”,生成“等待开门”任务。
3. 外拓板把两个结果塞进同一时空坐标系(ROS2 topic),状态机挂起导航,直到门被打开或超时。
4. 若超时,则语音主动询问:“阳台门好像没开,要继续等吗?”——用对话把不确定性抛回给人类。
五、姿态调节:从“能动”到“懂你”
传统轮椅靠背角度固定,久坐压疮风险高。我们的做法是:
视觉检测骶骨位置,估算压力分布。
大模型根据“同一姿势持续时长+心率变异”判断疲劳等级。
电机微调节:每 15 分钟 3° 微调,老人无感,却能有效降低压疮发生率。
夜间模式:完全静音,把调节动作拆成 0.5°/min 的“蠕行”,连陪护都察觉不到。
结语
技术人常陷入“做加法”的狂欢,但真正让老人受益的,往往是不动筋骨的“微创新”。Deepoc 外拓板的价值不在性能多炸裂,而在于“让老设备长出眼睛、耳朵和一点点同理心”。希望这篇小记能点燃更多同行对“外挂式智能化”的想象——毕竟,最好的适老化改造,是让老人感觉不到被改造。

















 910
910

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









