




一 . 手眼标定的作用及目的
机器人视觉应用中,手眼标定是一个非常基础且关键的问题。简单来说手眼标定的目的就是获取机器人坐标系和相机坐标系的关系,最后将视觉识别的结果转移到机器人坐标系下。
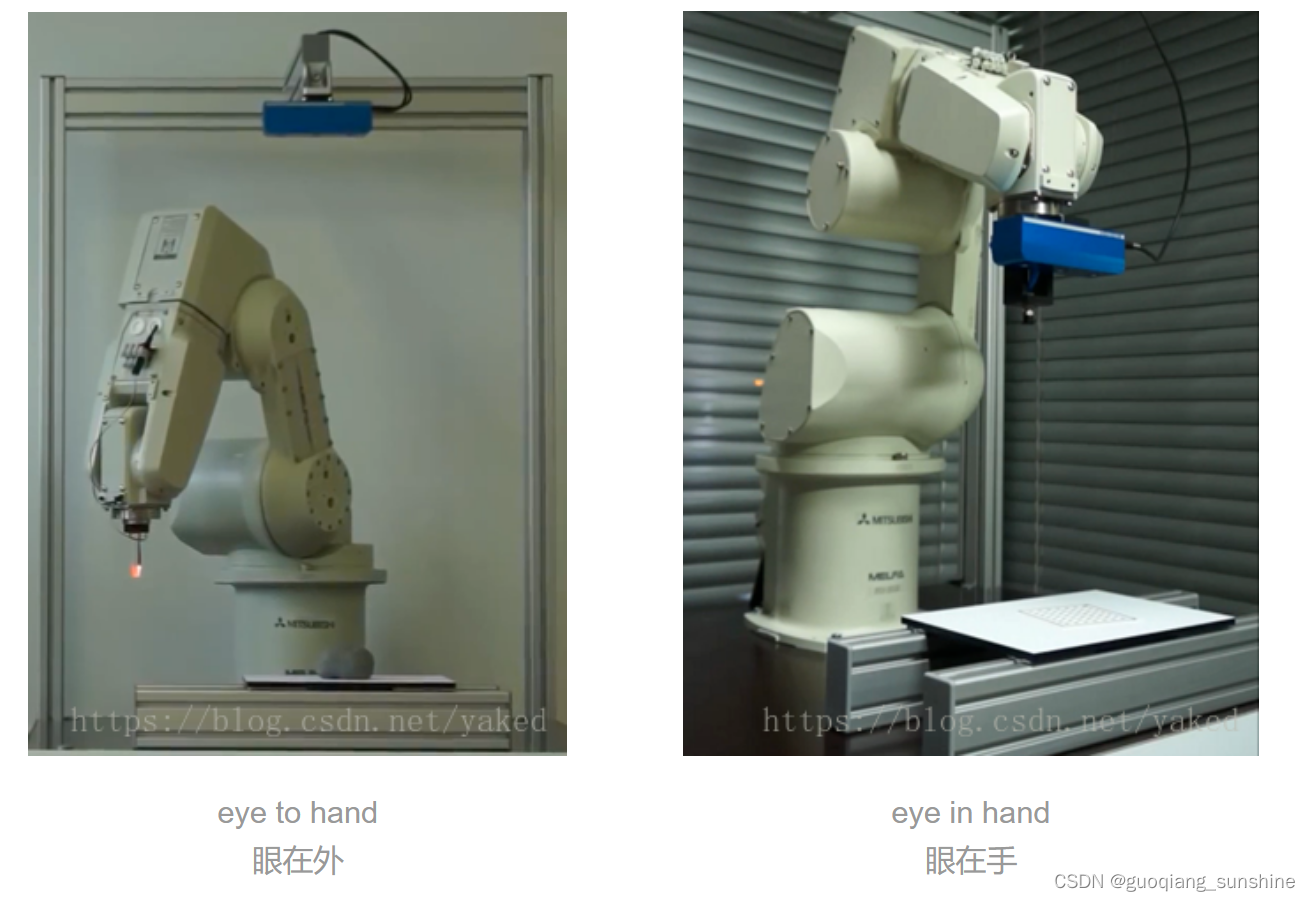
手眼标定行业内分为两种形式,根据相机固定的地方不同,如果相机和机器人末端固定在一起,就称之为“眼在手”(eye in hand),如果相机固定在机器人外面的底座上,则称之为“眼在外”(eye to hand)。
二、手眼关系的数学描述
-
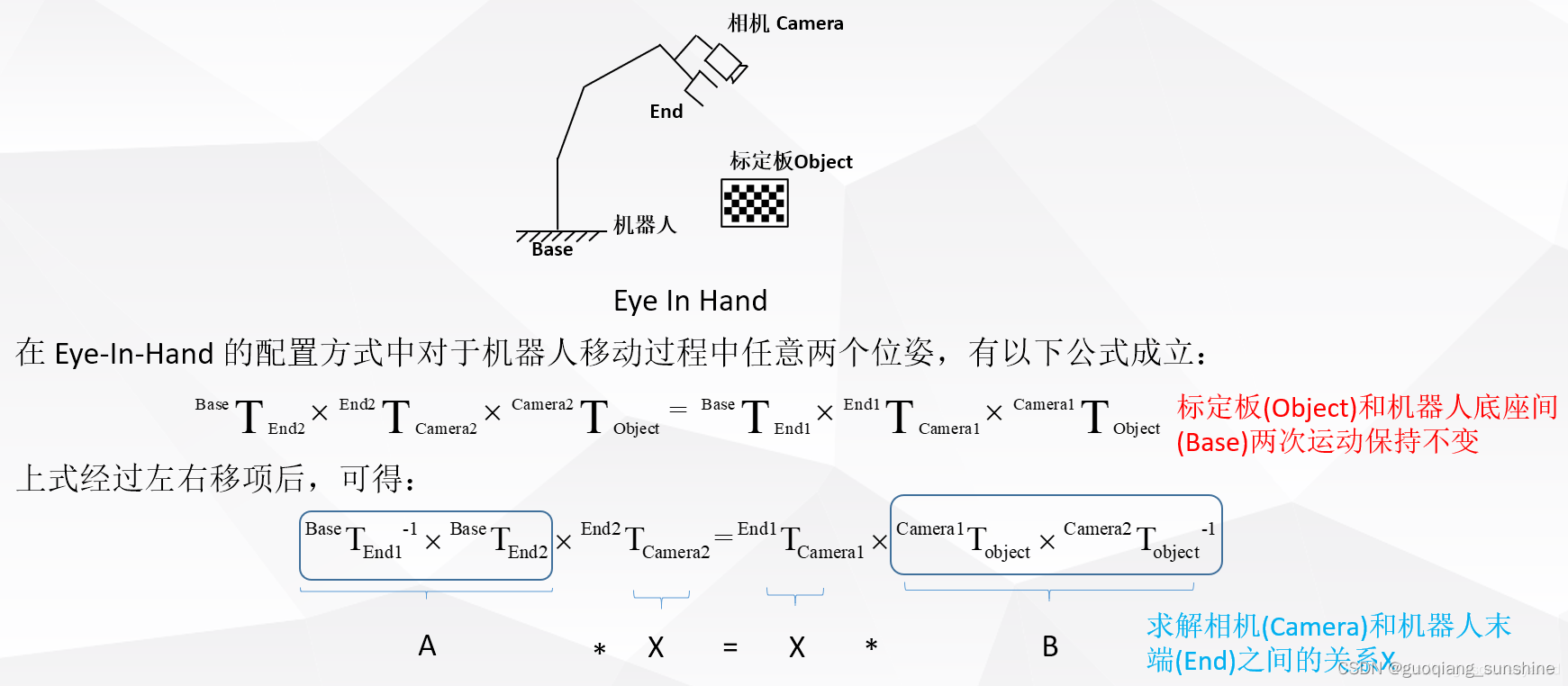
eye in hand,这种关系下,两次运动,机器人底座和标定板的关系始终不变。求解的量为相机和机器人末端坐标系的位姿关系。
-
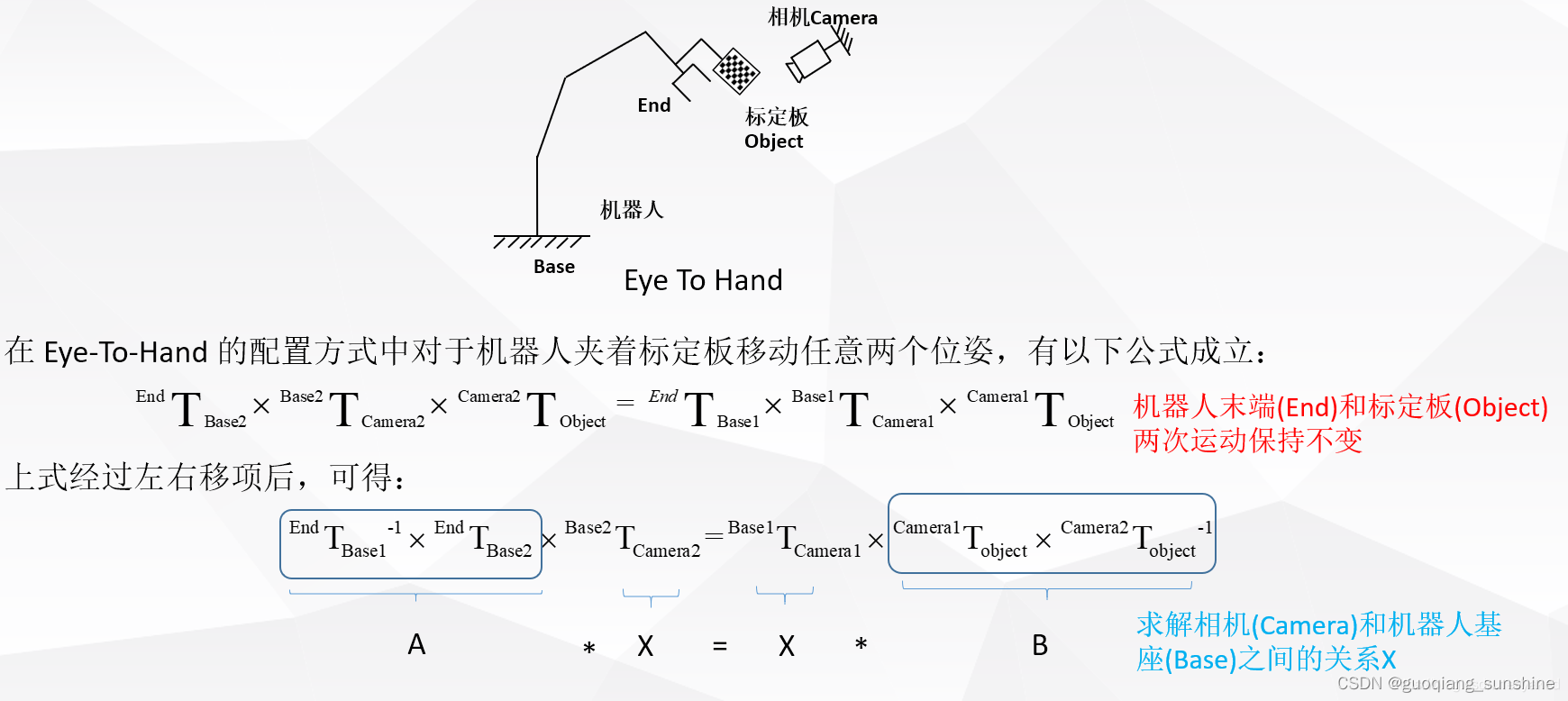
eye to hand,这种关系下,两次运动,机器人末端和标定板的位姿关系始终不变。求解的量为相机和机器人底座坐标系之间的位姿关系。
注:手眼标定eye in hand 和eye to hand 的区别主要是机器人那边。一个是end相对于base,另一个是base相对于end。千万注意,对于eye to hand 这种模式,机器人的位置、姿态是末端相对于底座的信息,并非示教器上的读数。
三、AX = XB问题的求解
旋转和平移分步法求解:
- Y. Shiu, S. Ahmad Calibration of Wrist-Mounted Robotic Sensors by Solving Homogeneous Transform Equations of the Form AX = XB. In IEEE Transactions on Robotics and Automation, 5(1):16-29, 1989.
- R. Tsai, R. Lenz A New Technique for Fully Autonomous and Efficient 3D Robotics Hand/Eye Calibration. In IEEE Transactions on Robotics and Automation, 5(3):345-358, 1989.
- easy_handeye: automated, hardware-independent Hand-Eye Calibration
- Calibration and Registration Techniques for Robotics
- Visual Servoing Platform
- TUM Hand-Eye Calibration
- 平面九点标定法


















 12万+
12万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











