




 本文介绍了视觉SLAM与IMU融合的优势,如互补运动估计误差,提高定位稳定性,并列举了学术界与工业界的融合方案,如MSCKF和ARKit。同时,通过代码展示了四元数和李代数在位姿更新中的应用,强调了融合技术在解决视觉SLAM问题中的重要性。
本文介绍了视觉SLAM与IMU融合的优势,如互补运动估计误差,提高定位稳定性,并列举了学术界与工业界的融合方案,如MSCKF和ARKit。同时,通过代码展示了四元数和李代数在位姿更新中的应用,强调了融合技术在解决视觉SLAM问题中的重要性。
《视觉SLAM进阶:从零开始手写VIO》第一讲作业
文章目录
1 视觉与IMU融合后优势互补!
- IMU虽然可以测得加速度和角速度,但这些量都存在明显的漂移,使得积分两次得到的位姿数据非常不可靠。但是,对于短时间内的快速运动,IMU能够提供一些较好的估计。这正是相机的弱点。当运动过快时,(卷帘快门的)相机会出现运动模糊,或者两帧之间重叠区域太少以至于无法进行特征匹配,所以纯视觉SLAM非常害怕快速的运动。而有IMU,即使在相机数据无效的那段时间内,我们还能保持一个较好的位姿估计,这是纯视觉SLAM无法做到的。额外要提的一点就是IMU的加速度计容易出现飘移,但是陀螺仪多角度的测量还是很准确的,有的时候会利用这个特性。
- 相比于IMU,相机数据基本不会有漂移。如果相机放在原地固定不动,那么(在静态场景下)视觉SLAM 的位姿估计也是固定不动的。所以,相机数据可以有效地估计并修正IMU读数中的漂移,使得在慢速运动后的位姿估计依然有效。
- 当图像发生变化时,本质上我们没法知道是相机自身发生了运动,还是外界条件发生了变化,所以纯视觉SLAM 难以处理动态的障碍物。而IMU能够感受到自己的运动信息,从某种程度上减轻动态物体的影响。 现在的扫地机器人基本采用LDS等类似的传感器来实现避障的功能。
- 对于单目视觉SLAM,存在尺度不确定性,融合IMU后可以恢复尺度。
- 纯视觉SLAM在容易受弱纹理场景和光照变化的影响,在定位失败时,可以依靠IMU进行短暂的定位。
综上,视觉与IMU融合之后会弥补各自的劣势,可利用视觉定位信息来估计IMU的零偏,减少IMU由零偏导致的发散和累积误差;IMU可以为视觉提供快速运动时的定位,以及因为某种因素(场景特征点较少,光照变化较大等)定位失败时。
2. 常见的视觉+IMU融合方案?有没有工业界应用的例子?
学术界应用
- MSCKF
- OKVIS
- ROVIO
- VIORB
- VINS-Mono,VINS-Mobile,VINS-Fusion
工业界应用
- Google:Tango,ARCore
- Apple:ARKit
- Microsoft:HoloLens
- 百度:DuMix AR
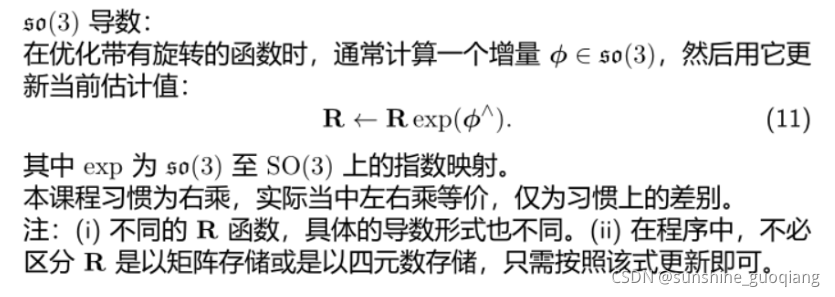
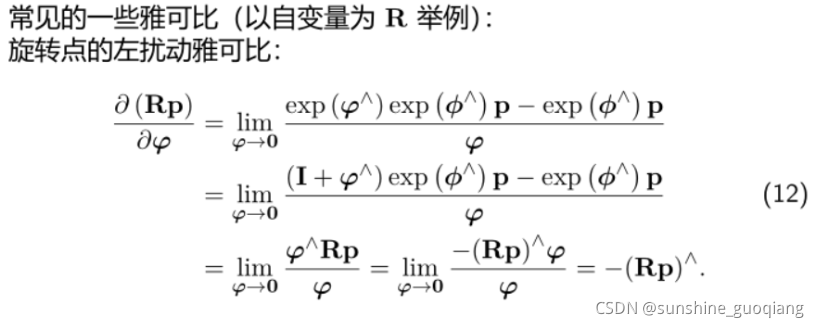
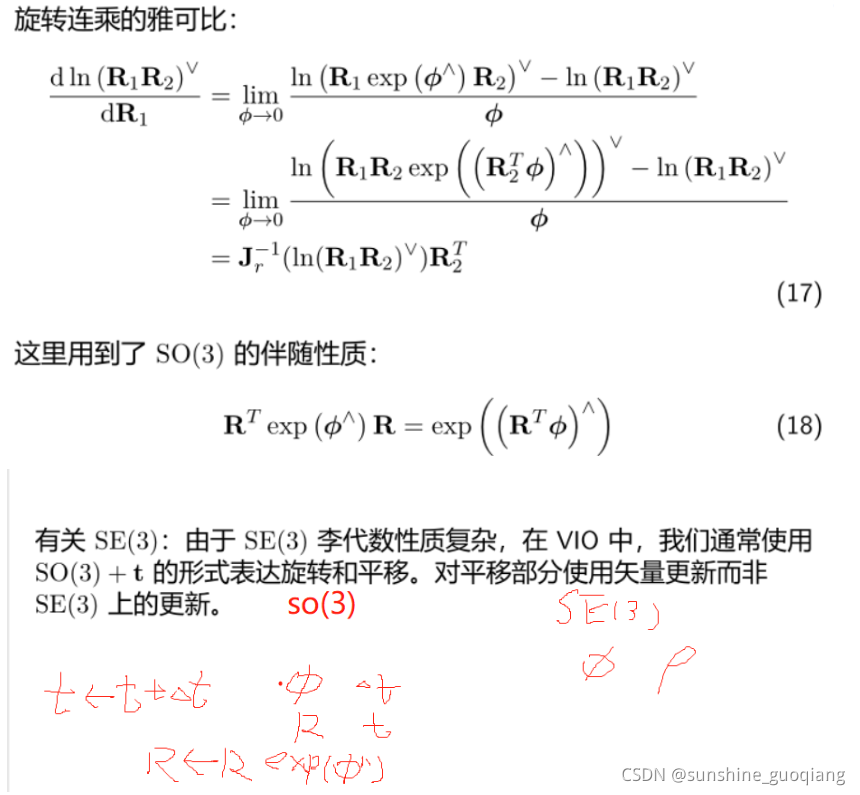
3. 四元数和李代数更新,位姿变化的求导及其连续变化下的表现形式

//验证在一个小量的变化下 采用旋转矩阵和四元数的差异大小
#include <iostream>
#include <Eigen/Core>
#include <Eigen/Geometry>
#include "sophus/so3.h"
#include "sophus/se3.h"
using namespace std;
int main( int argc, char** argv )
{
// 沿Z轴转90度的旋转矩阵
Eigen::Matrix3d R = Eigen::AngleAxisd(M_PI/2, Eigen::Vector3d(0,0,1)).toRotationMatrix();
cout << "R * R^t ?= I"<< endl << R * R.transpose() <<endl;
Sophus::SO3 SO3_R(R); // 从旋转矩阵构造Sophus::SO(3)
Eigen::Quaterniond q(R); // 从旋转矩阵构造四元数
// 李代数更新
Eigen::Vector3d update_so3(0.01, 0.02, 0.03); //更新量
Sophus::SO3 SO3_updated = SO3_R * Sophus::SO3::exp(update_so3);
cout<<"SO3 updated = "<< endl << SO3_updated.matrix() <<endl;
//四元数更新
Eigen::Quaterniond q_update(1, update_so3(0)/2, update_so3(1)/2, update_so3(2)/2);
Eigen::Quaterniond q_updated = (q * q_update).normalized(); //四元数归一化
cout<<"q2R = "<< endl << q_updated.toRotationMatrix() <<endl;
return 0;
}

4. 作业

[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-4AKIUL8v-1633962608968)(…/AppData/Roaming/Typora/typora-user-images/1630252181111.png)]
5.参考
[1] 《视觉SLAM进阶:从零开始手写VIO》
[2] 《视觉SLAM十四讲》
[3] https://zhuanlan.zhihu.com/p/68627439https://zhuanlan.zhihu.com/p/68627439
视觉SLAM十四讲》
[3] https://zhuanlan.zhihu.com/p/68627439https://zhuanlan.zhihu.com/p/68627439
[4]https://blog.youkuaiyun.com/learning_tortosie/article/details/102408738



















 316
316

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











