




 本文介绍了使用51单片机构建的人体感应灯系统,具备自动警报和远程蓝牙控制功能。通过AD模块检测光强,当人靠近或离开时灯和蜂鸣器相应变化。程序设计采用Keil5,附带原理图和全部资料链接。
本文介绍了使用51单片机构建的人体感应灯系统,具备自动警报和远程蓝牙控制功能。通过AD模块检测光强,当人靠近或离开时灯和蜂鸣器相应变化。程序设计采用Keil5,附带原理图和全部资料链接。
目录
具体实现功能
系统由单片机最小系统+光敏电阻及AD模块+蓝牙模块+红外模块+LED灯+蜂鸣器+电源构成
具体功能:
(1)当人靠近的时候灯亮,太靠近的时候,蜂鸣器鸣叫发出警报,如果在一定时间内人没有离开,灯会自动灭;
(2)当人离开的时候,灯灭;
(3)手机蓝牙可以控制灯的亮灭和亮度,轮番发送“1”、“2”灯会在“较亮”、“很亮”切换;发送指令“C”,灯灭。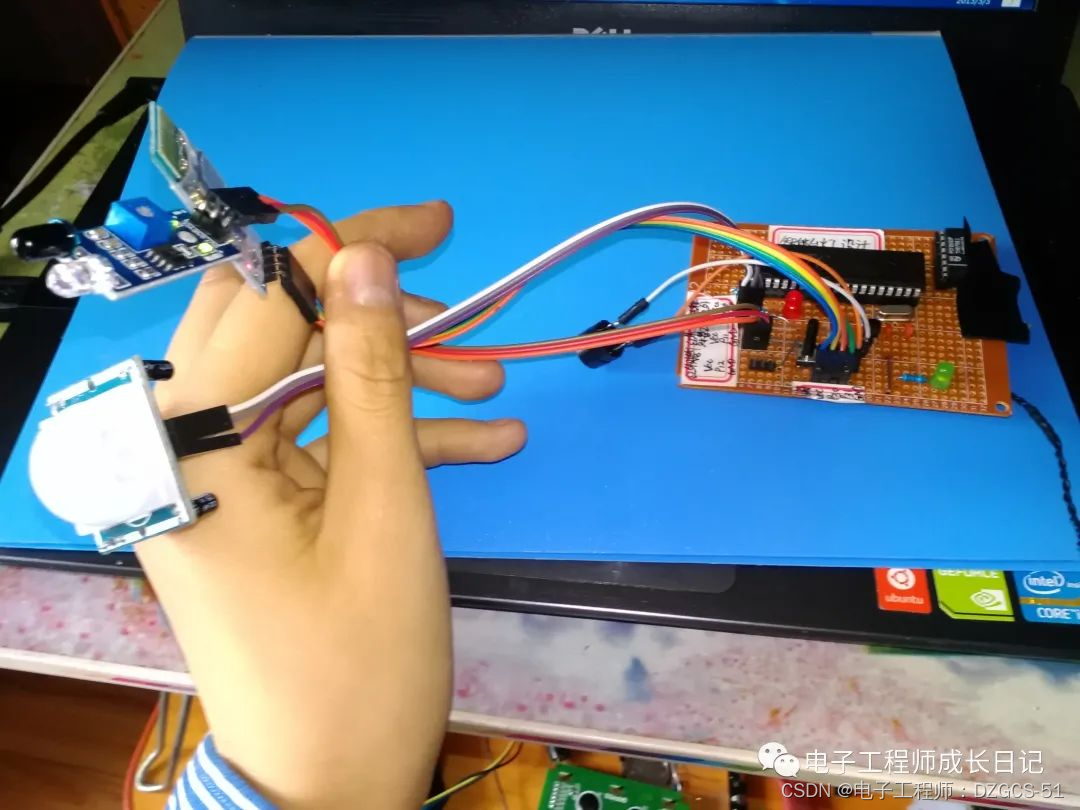
设计介绍
51单片机简介
51单片是一种低功耗、高性能CMOS-8位微控制器,具有8K可编程Flash存储器,使得其为众多嵌入式控制应用系统提供高灵活、超有效的解决方案。
51系列单片机具有以下标准功能:
8k字节Flash,512字节RAM,
32位I/O口线,看门狗定时器,
内置4KB EEPROM,
MAX810复位电路,
三个16位定时器/计数器,
一个6向量2级中断结构,
全双工串行口。
另外, 51系列在空闲模式下,CPU停止工作,允许RAM、定时器/计数器、串口、中断继续工作。掉电保护方式下,RAM内容被保存,振荡器被冻结,单片机停止工作,直到下一个中断或硬件复位为止。本设计所使用的芯片可兼容以下所有的51系列单片机(包括AT系列和STC系列)。
设计思路
文献研究法:搜集整理相关研究资料,阅读文献,为研究做准备;
调查研究法:通过调查、分析、具体实验等方法,发现相关存在问题和解决办法;
比较分析法:比较不同设计的具体原理,以及同一类传感器性能的区别,分析系统的研究现状与发展前景;
软硬件设计法:通过软硬件设计实现硬件,最后测试各项功能是否满足要求。
设计内容
原理图(AD19)
本系统原理图设计采用Altium Designer19,具体如图。

程序(Keil5)
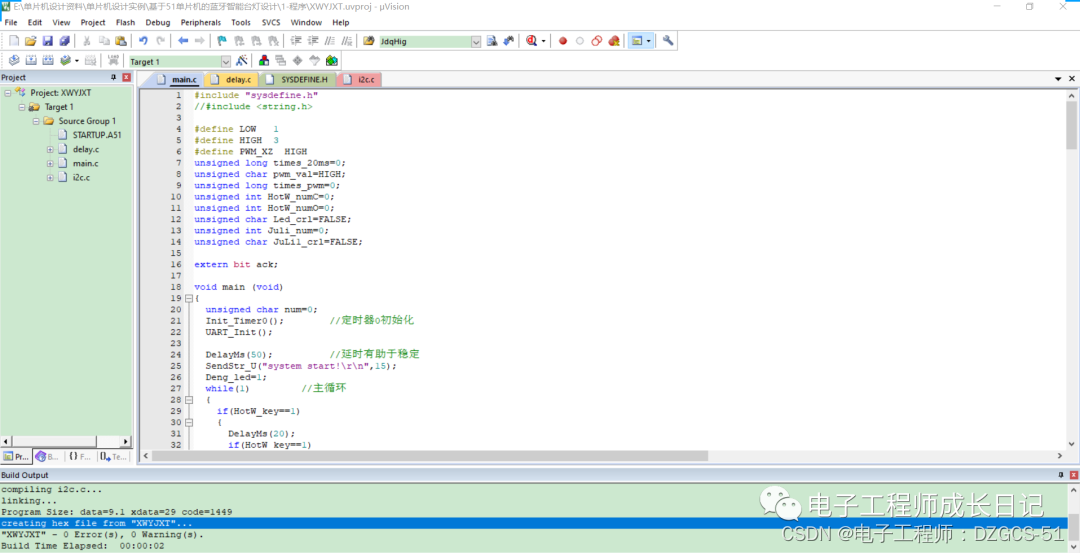
本设计利用KEIL5软件实现程序设计,主函数如下:
void main (void)
{
unsigned char num=0;
Init_Timer0(); //定时器0初始化
UART_Init();
DelayMs(50); //延时有助于稳定
SendStr_U("system start!\r\n",15);
Deng_led=1;
while(1) //主循环
{
if(HotW_key==1)
{
DelayMs(20);
if(HotW_key==1)
{
HotW_numC=0;
HotW_numO++;
if(HotW_numO>=80)//2S时间 有人
{
num=ReadADC(0); //读取AD检测到的 光敏地值
if(num>=210)
{}
else
{
Led_crl=FALSE;
}
HotW_numO=0;
}
}
}
else if(HotW_key==0)
{
HotW_numO=0;
HotW_numC++;
DelayMs(2);
if(HotW_numC>=800)//2S
{
HotW_numC=0;
Led_crl=FALSE;
}
}
if(JuLi1_key==0)
{
DelayMs(20);
if(JuLi1_key==0)
{
Juli_num++;
if(Juli_num>=50) //1s
{
buzzer=0;
if(Juli_num>=450) //10S
{
JuLi1_crl=TRUE;
}
}
}
}
else
{
JuLi1_crl=FALSE;
buzzer=1;
Juli_num=0;
}
}
}代码运行截图:
全部资料
全部资料包括程序(KEIL5)、AD原理图(AD19)、参考论文(仅供参考)、任务书、实物图等,具体如图,全网最全!!

资料获取:
https://docs.qq.com/doc/DSVh3aVBKd25yS0V4

















 1408
1408

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









