









 本文介绍了单片机学习中,如何利用指针作为数组在函数中的输入接口。通过proteus虚拟串口的实现,详细讲解了从绘制电路图、编写程序到仿真的全过程,阐述了指针在处理数组数据时的优势。
本文介绍了单片机学习中,如何利用指针作为数组在函数中的输入接口。通过proteus虚拟串口的实现,详细讲解了从绘制电路图、编写程序到仿真的全过程,阐述了指针在处理数组数据时的优势。
proteus虚拟串口的实现:https://mp.youkuaiyun.com/console/editor/html/107251649
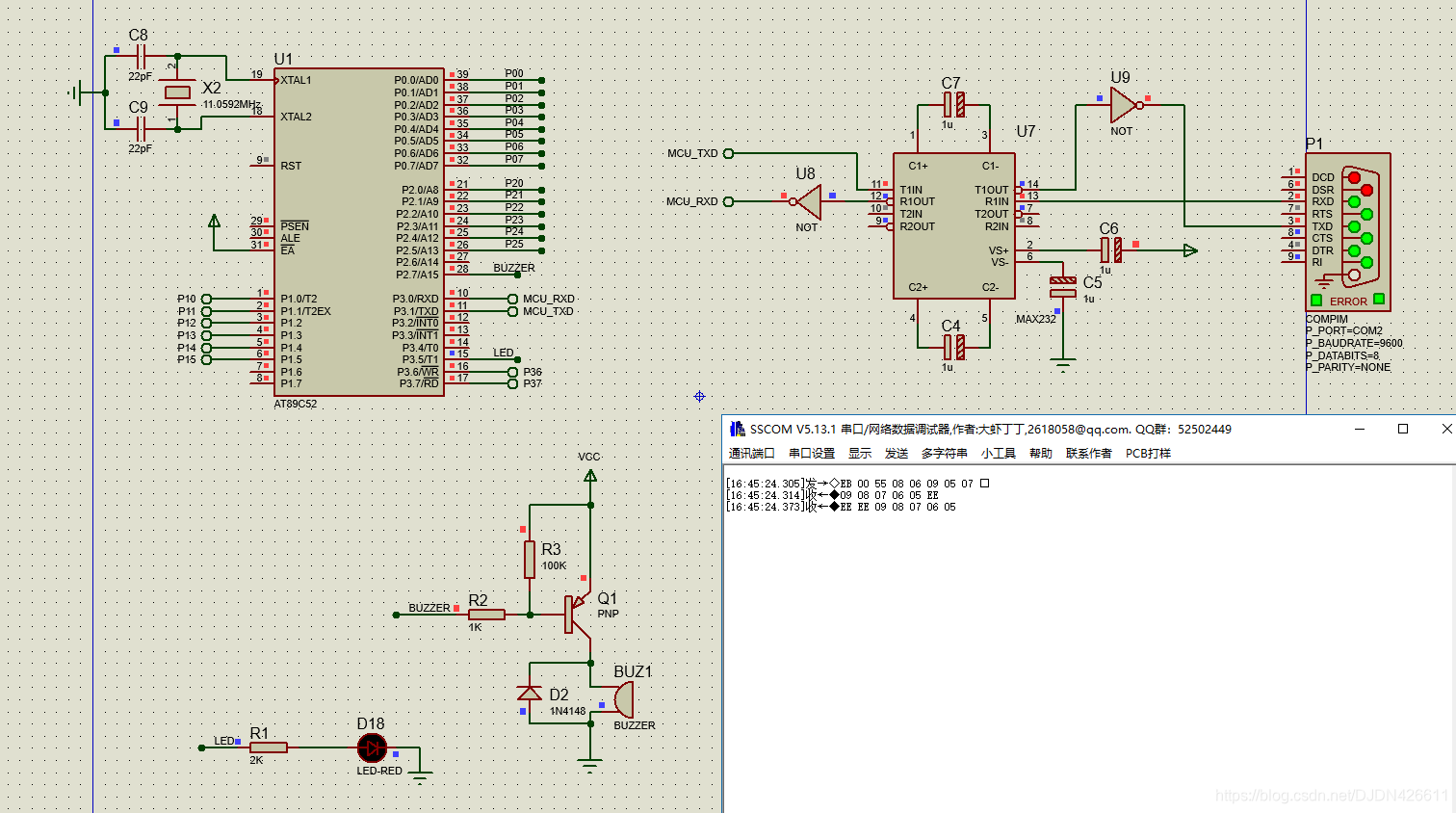
一、使用proteus绘制简单的电路图,用于后续仿真

二、编写程序
/********************************************************************************************************************
---- @Project: Pointer
---- @File: main.c
---- @Edit: ZHQ
---- @Version: V1.0
---- @CreationTime: 20200808
---- @ModifiedTime: 20200808
---- @Description:
---- 波特率是:9600 。
---- 通讯协议:EB 00 55 XX YY
---- 把5个随机数据按从大到小排序,用冒泡法来排序。
---- 通过电脑串口调试助手,往单片机发送EB 00 55 08 06 09 05 07 指令,其中EB 00 55是数据头,08 06 09 05 07 是参与排序的5个随机原始数据。单片机收到指令后就会返回13个数据,最前面5个数据是第1种方法的排序结果,中间3个数据EE EE EE是第1种和第2种的分割线,为了方便观察,没实际意义。最后5个数据是第2种方法的排序结果.
----
---- 比如电脑发送:EB 00 55 08 06 09 05 07
---- 单片机就返回:09 08 07 06 05 EE EE EE 09 08 07 06 05
---- 单片机:AT89C52
********************************************************************************************************************/
#include "reg52.h"
/*——————宏定义——————*/
#define FOSC 11059200L
#define BAUD 9600
#define T1MS (65536-FOSC/12/500) /*0.5ms timer calculation method in 12Tmode*/
#define const_array_size 5 /* 参与排序的数组大小 */
#define const_voice_short 19 /*蜂鸣器短叫的持续时间*/
#define const_rc_size 10 /*接收串口中断数据的缓冲区数组大小*/
#define const_receive_time 5 /*如果超过这个时间没有串口数据过来,就认为一串数据已经全部接收完,这个时间根据实际情况来调整大小*/
/*——————变量函数定义及声明——————*/
/*蜂鸣器的驱动IO口*/
sbit BEEP = P2^7;
/*LED*/
sbit LED = P3^5;
unsigned int uiSendCnt = 0; /*用来识别串口是否接收完一串数据的计时器*/
unsigned char ucSendLock = 1; /*串口服务程序的自锁变量,每次接收完一串数据只处理一次*/
unsigned int uiRcregTotal = 0; /*代表当前缓冲区已经接收了多少个数据*/
unsigned char ucRcregBuf[const_rc_size]; /*接收串口中断数据的缓冲区数组*/
unsigned int uiRcMoveIndex = 0; /*用来解析数据协议的中间变量*/
unsigned int uiVoiceCnt = 0; /*蜂鸣器鸣叫的持续时间计数器*/
unsigned char ucUsartBuffer[const_array_size]; /* 从串口接收到的需要排序的原始数据 */
unsigned char ucGlobalBuffer_1[const_array_size]; /* 第1种方法,参与具体排序算法的全局变量数组 */
unsigned char ucGlobalBuffer_2[const_array_size]; /* 第2种方法,参与具体排序算法的全局变量数组 */
/**
* @brief 定时器0初始化函数
* @param 无
* @retval 初始化T0
**/
void Init_T0(void)
{
TMOD = 0x01; /*set timer0 as mode1 (16-bit)*/
TL0 = T1MS; /*initial timer0 low byte*/
TH0 = T1MS >> 8; /*initial timer0 high byte*/
}
/**
* @brief 串口初始化函数
* @param 无
* @retval 初始化T0
**/
void Init_USART(void)
{
SCON = 0x50;
TMOD = 0x21;
TH1=TL1=-(FOSC/12/32/BAUD);
}
/**
* @brief 外围初始化函数
* @param 无
* @retval 初始化外围
* 让数码管显示的内容转移到以下几个变量接口上,方便以后编写更上一层的窗口程序。
* 只要更改以下对应变量的内容,就可以显示你想显示的数字。
**/
void Init_Peripheral(void)
{
ET0 = 1;/*允许定时中断*/
TR0 = 1;/*启动定时中断*/
TR1 = 1;
ES = 1; /*允许串口中断*/
EA = 1;/*开总中断*/
}
/**
* @brief 初始化函数
* @param 无
* @retval 初始化单片机
**/
void Init(void)
{
LED = 0;
Init_T0();
Init_USART();
}
/**
* @brief 延时函数
* @param 无
* @retval 无
**/
void Delay_Long(unsigned int uiDelayLong)
{
unsigned int i;
unsigned int j;
for(i=0;i<uiDelayLong;i++)
{
for(j=0;j<500;j++) /*内嵌循环的空指令数量*/
{
; /*一个分号相当于执行一条空语句*/
}
}
}
/**
* @brief 延时函数
* @param 无
* @retval 无
**/
void Delay_Short(unsigned int uiDelayShort)
{
unsigned int i;
for(i=0;i<uiDelayShort;i++)
{
; /*一个分号相当于执行一条空语句*/
}
}
/**
* @brief 串口发送函数
* @param unsigned char ucSendData
* @retval 往上位机发送一个字节的函数
**/
void eusart_send(unsigned char ucSendData)
{
ES = 0; /* 关串口中断 */
TI = 0; /* 清零串口发送完成中断请求标志 */
SBUF = ucSendData; /* 发送一个字节 */
Delay_Short(400); /* 每个字节之间的延时,这里非常关键,也是最容易出错的地方。延时的大小请根据实际项目来调整 */
TI = 0; /* 清零串口发送完成中断请求标志 */
ES = 1; /* 允许串口中断 */
}
/**
* @brief 第1种方法
* @param 无
* @retval
* 第1种方法,用不带输入输出接口的空函数,这是最原始的做法,它完全依靠
* 全局变量作为函数的输入和输出口。我们要用到这个函数,就要把参与运算
* 的变量直接赋给对应的输入全局变量,调用一次函数之后,再找到对应的
* 输出全局变量,这些输出全局变量就是我们要的结果。
* 在本函数中,ucGlobalBuffer_1[const_array_size]既是输入全局变量,也是输出全局变量,
* 这种方法的缺点是阅读不直观,封装性不强,没有面对用户的输入输出接口,
**/
void big_to_small_sort_1(void) /* 第1种方法 把一个数组从大小小排序 */
{
unsigned char i;
unsigned char k;
unsigned char ucTemp; /* 在两两交换数据的过程中,用于临时存放交换的某个变量 */
/* 冒泡法 */
for(i = 0; i < (const_array_size - 1); i ++) /* 冒泡的次数是(const_array_size-1)次 */
{
for(k = 0; k < (const_array_size - 1 - i); k ++)
{
if(ucGlobalBuffer_1[const_array_size - 1 - k] > ucGlobalBuffer_1[const_array_size - 1 - 1 - k])
{
ucTemp = ucGlobalBuffer_1[const_array_size - 1 - 1 - k];
ucGlobalBuffer_1[const_array_size - 1 - 1 - k] = ucGlobalBuffer_1[const_array_size - 1 - k];
ucGlobalBuffer_1[const_array_size - 1 - k] = ucTemp;
}
}
}
}
/**
* @brief 第2种方法
* @param 无
* @retval
* 第2种方法,为了改进第1种方法的用户体验,用指针为函数增加一个输入接口。
* 为什么要用指针?因为C语言的函数中,数组不能直接用来做函数的形参,只能用指针作为数组的形参。
* 比如,你不能这样写一个函数void big_to_small_sort_2(unsigned char a[5]),否则编译就会出错不通过。
* 在本函数中,*p_ucInputBuffer指针就是输入接口,而输出接口仍然是全局变量数组ucGlobalBuffer_2。
* 这种方法由于为函数多增加了一个数组输入接口,已经比第1种方法更加直观了。
**/
void big_to_small_sort_2(unsigned char *p_ucInputBuffer)
{
unsigned char i;
unsigned char k;
unsigned char ucTemp; /* 在两两交换数据的过程中,用于临时存放交换的某个变量 */
for(i = 0; i < const_array_size; i ++) /* 参与排序算法之前,先把输入接口的数据全部搬移到全局变量数组中。 */
{
ucGlobalBuffer_2[i] = p_ucInputBuffer[i];
}
/* 冒泡法 */
for(i = 0; i < (const_array_size - 1); i ++) /* 冒泡的次数是(const_array_size-1)次 */
{
for(k = 0; k < (const_array_size - 1 - i); k ++)
{
if(ucGlobalBuffer_2[const_array_size - 1 - k] > ucGlobalBuffer_2[const_array_size - 1 - 1 - k])
{
ucTemp = ucGlobalBuffer_2[const_array_size - 1 - 1 - k];
ucGlobalBuffer_2[const_array_size - 1 - 1 - k] = ucGlobalBuffer_2[const_array_size - 1 - k];
ucGlobalBuffer_2[const_array_size - 1 - k] = ucTemp;
}
}
}
}
/**
* @brief 串口服务程序
* @param 无
* @retval
* 以下函数说明了,在空函数里,可以插入很多个return语句。
* 用return语句非常便于后续程序的升级修改。
**/
void usart_service(void)
{
unsigned char i = 0;
// /*如果超过了一定的时间内,再也没有新数据从串口来*/
// if(uiSendCnt >= const_receive_time && ucSendLock == 1)
// {
// 原来的语句,现在被两个return语句替代了
if(uiSendCnt < const_receive_time) /* 延时还没超过规定时间,直接退出本程序,不执行return后的任何语句。 */
{
return; /* 强行退出本子程序,不执行以下任何语句 */
}
if(ucSendLock == 0) /* 不是最新一次接收到串口数据,直接退出本程序,不执行return后的任何语句。 */
{
return; /* 强行退出本子程序,不执行以下任何语句 */
}
/*
* 以上两条return语句就相当于原来的一条if(uiSendCnt>=const_receive_time&&ucSendLock==1)语句。
* 用了return语句后,就明显减少了一个if嵌套。
*/
ucSendLock = 0; /*处理一次就锁起来,不用每次都进来,除非有新接收的数据*/
/*下面的代码进入数据协议解析和数据处理的阶段*/
uiRcMoveIndex = 0; /*由于是判断数据头,所以下标移动变量从数组的0开始向最尾端移动*/
// /*
// * 判断数据头,进入循环解析数据协议必须满足两个条件:
// * 第一:最大接收缓冲数据必须大于一串数据的长度(这里是5。包括2个有效数据,3个数据头)
// * 第二:游标uiRcMoveIndex必须小于等于最大接收缓冲数据减去一串数据的长度(这里是5。包括2个有效数据,3个数据头)
// */
// while(uiRcregTotal >= 5 && uiRcMoveIndex <= (uiRcregTotal - 5))
// {
// 原来的语句,现在被两个return语句替代了
while(1) /* 死循环可以被以下return或者break语句中断,return本身已经包含了break语句功能。 */
{
if(uiRcregTotal < 5) /* 串口接收到的数据太少 */
{
uiRcregTotal = 0; /*清空缓冲的下标,方便下次重新从0下标开始接受新数据*/
return; /* 强行退出while(1)循环嵌套,直接退出本程序,不执行以下任何语句 */
}
if(uiRcMoveIndex > (uiRcregTotal - 5)) /* 数组缓冲区的数据已经处理完 */
{
uiRcregTotal = 0; /*清空缓冲的下标,方便下次重新从0下标开始接受新数据*/
return; /* 强行退出while(1)循环嵌套,直接退出本程序,不执行以下任何语句 */
}
/*
* 以上两条return语句就相当于原来的一条while(uiRcregTotal>=5&&uiRcMoveIndex<=(uiRcregTotal-5))语句。
* 以上两个return语句的用法,同时说明了return本身已经包含了break语句功能,不管当前处于几层的内部循环嵌套,
* 都可以强行退出循环,并且直接退出本程序。
*/
if(ucRcregBuf[uiRcMoveIndex + 0] == 0xeb && ucRcregBuf[uiRcMoveIndex + 1] == 0x00 && ucRcregBuf[uiRcMoveIndex + 2] == 0x55)
{
for(i = 0; i < const_array_size; i ++) /* 从串口接收到的需要被排序的原始数据 */
{
ucUsartBuffer[i] = ucRcregBuf[uiRcMoveIndex+3+i];
}
/* 第1种运算方法,依靠全局变量 */
for(i = 0; i < const_array_size; i ++) /* 把需要被排列的数据放进输入全局变量数组 */
{
ucGlobalBuffer_1[i] = ucUsartBuffer[i];
}
big_to_small_sort_1(); /* 调用一次空函数就出结果了,结果还是保存在ucGlobalBuffer_1全局变量数组中 */
for(i = 0; i < const_array_size; i ++)
{
eusart_send(ucGlobalBuffer_1[i]); /* 把用第1种方法排序后的结果返回给上位机观察 */
}
/* 为了方便上位机观察,多发送3个字节ee ee ee作为第1种方法与第2种方法的分割线 */
eusart_send(0xee);
eusart_send(0xee);
eusart_send(0xee);
/* 第2种运算方法,依靠指针为函数增加一个数组的输入接口 */
/* 通过指针输入接口,直接把ucUsartBuffer数组的首地址传址进去,排序后输出的结果还是保存在ucGlobalBuffer_2全局变量数组中 */
big_to_small_sort_2(ucUsartBuffer);
for(i = 0; i < const_array_size; i ++)
{
eusart_send(ucGlobalBuffer_2[i]); /* 把用第2种方法排序后的结果返回给上位机观察 */
}
break; /*退出while(1)循环*/
}
uiRcMoveIndex ++; /*因为是判断数据头,游标向着数组最尾端的方向移动*/
}
// }
uiRcregTotal = 0; /*清空缓冲的下标,方便下次重新从0下标开始接受新数据*/
// }
}
/**
* @brief 定时器0中断函数
* @param 无
* @retval 无
**/
void ISR_T0(void) interrupt 1
{
TF0 = 0; /*清除中断标志*/
TR0 = 0; /*关中断*/
if(uiSendCnt < const_receive_time) /*如果超过这个时间没有串口数据过来,就认为一串数据已经全部接收完*/
{
uiSendCnt ++; /*表面上这个数据不断累加,但是在串口中断里,每接收一个字节它都会被清零,除非这个中间没有串口数据过来*/
ucSendLock = 1; /*开自锁标志*/
}
if(uiVoiceCnt != 0)
{
uiVoiceCnt --;
BEEP = 0;
}
else
{
;
BEEP = 1;
}
TL0 = T1MS; /*initial timer0 low byte*/
TH0 = T1MS >> 8; /*initial timer0 high byte*/
TR0 = 1; /*开中断*/
}
/**
* @brief 串口接收数据中断
* @param 无
* @retval 无
**/
void usart_receive(void) interrupt 4
{
if(RI == 1)
{
RI = 0;
++ uiRcregTotal;
if(uiRcregTotal > const_rc_size)
{
uiRcregTotal = const_rc_size;
}
ucRcregBuf[uiRcregTotal - 1] = SBUF; /*将串口接收到的数据缓存到接收缓冲区里*/
uiSendCnt = 0; /*及时喂狗,虽然main函数那边不断在累加,但是只要串口的数据还没发送完毕,那么它永远也长不大,因为每个中断都被清零。*/
}
else
{
TI = 0;
}
}
/*————————————主函数————————————*/
/**
* @brief 主函数
* @param 无
* @retval 实现LED灯闪烁
**/
void main()
{
/*单片机初始化*/
Init();
/*延时,延时时间一般是0.3秒到2秒之间,等待外围芯片和模块上电稳定*/
Delay_Long(100);
/*单片机外围初始化*/
Init_Peripheral();
while(1)
{
usart_service();
}
}
三、仿真实现
指针的第二大好处,指针作为数组在函数中的输入接口


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









