



 本文介绍了一个天车自动监测与报警系统的设计,旨在防止天车碰撞。系统利用传感器进行距离检测,当天车间距离小于5米时发出声光报警,小于2米时切断电源并启动制动,同时具备2-8米的检测范围和0.1米的精度。设计中还包括了通信部分和软件控制系统,允许进一步的二次开发。
本文介绍了一个天车自动监测与报警系统的设计,旨在防止天车碰撞。系统利用传感器进行距离检测,当天车间距离小于5米时发出声光报警,小于2米时切断电源并启动制动,同时具备2-8米的检测范围和0.1米的精度。设计中还包括了通信部分和软件控制系统,允许进一步的二次开发。
该设计主要完成对天车距离的自动监测与报警。包括传感器与测量电路设计、报警电路设计、主机及扩展部分设计、通信部分和系统软件设计
技术要求
(1)天车行进不能碰撞
(2)当天车之间的距离小于5米时,提出声光报警当距离小于2米时,切断天车的电源、并启动制动装置,同时继续报警,只有当天车启动反向运动时才能重新开启天车
(3)距离检测范围:2m-8m,检测精度:0.1m:当距离小于5m时,控制人车减速,并以低速运行,防止因天车商速行进并瞬间急停造成吊钩的摆动检测目标距并显小在液品屏上
注:可以在此基础上修改二次开发。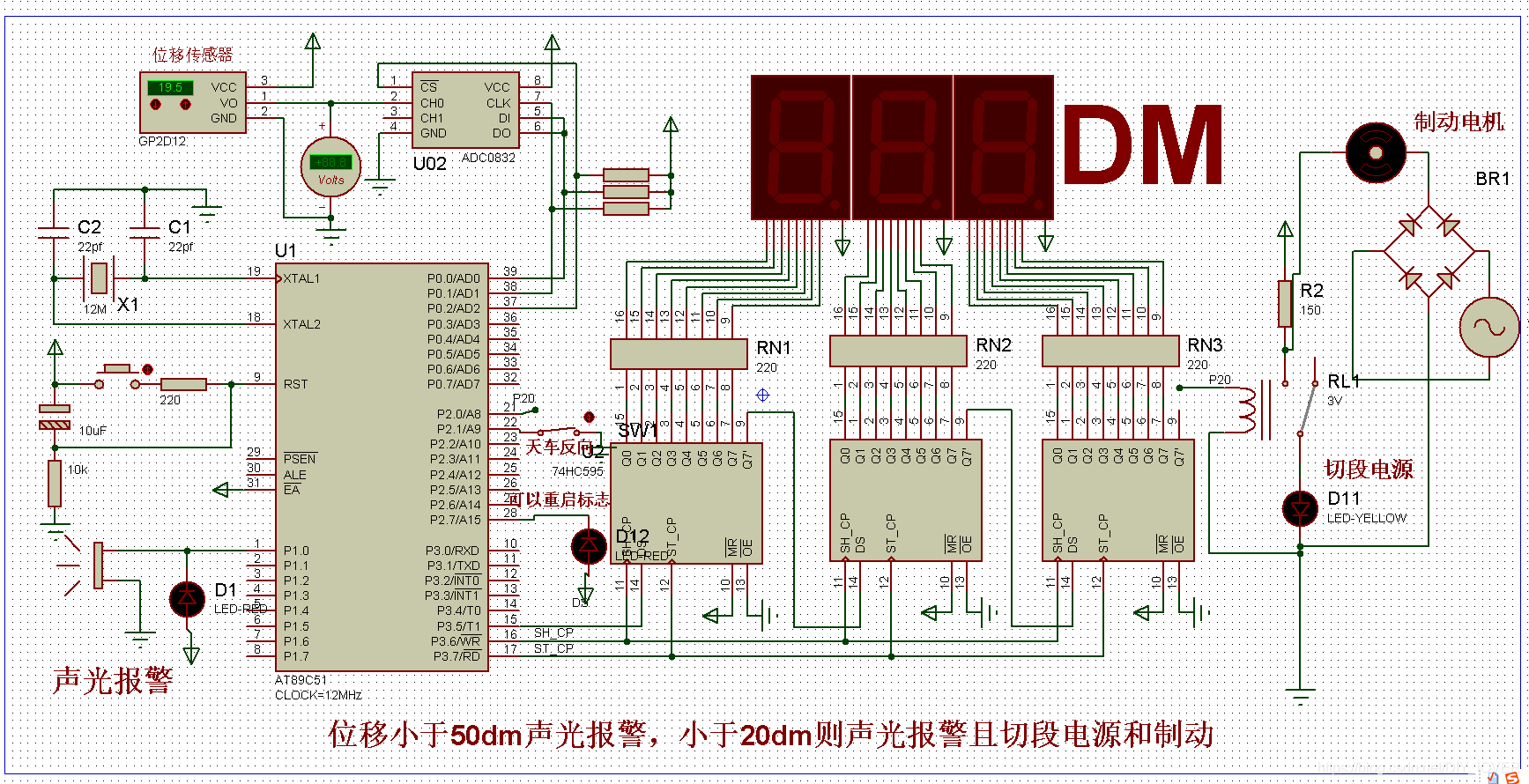
#include <reg51.h>
#include <intrins.h>
#include <stdio.h>
#include <math.h>
#define INT8U unsigned char
#define INT16U unsigned int
#define INT32U unsigned long
sbit DIO = P0 ^ 0; /* 数据线 */
sbit CLK = P0 ^ 1; /* 时钟钟线 */
sbit CS = P0 ^ 2; /* 片选线 */
sbit STOP = P2 ^ 0;
sbit DIR = P2 ^ 1;
sbit TIAN = P2 ^ 7;
sbit TING = P1 ^ 7;
/*
* -----------------------------------------------------------------
* 获取指定通道的A/D转换结果
* -----------------------------------------------------------------
*/
INT8U Get_CHx_AD_Value( INT8U ch )
{
INT8U i, dat1 = 0, dat2 = 0;
/* 使能ADC0832,时钟线初始置低电平 */
CS = 0; CLK = 0;
/* 第1个时钟脉冲上升沿之前置DIO为1,表示Start Bit */
DIO = 1; _nop_(); _nop_();
CLK = 1; _nop_(); _nop_();
/*
* 第2个时钟脉冲上升沿之前,通过DIO选择模式
* 设DI=1选择单端(SGL)设DI=0选择差分(DIF)


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









