



碛口古镇,位于山西省吕梁市临县,是一座历史悠久、文化底蕴深厚的古镇。以下是关于碛口古镇的详细介绍:
一、基本信息
- 地理位置:碛口镇位于吕梁山西麓,黄河之滨,临县之南端,距临县城约50千米,南临柳林县孟门镇,东与林家坪镇相连,北与丛罗峪镇接壤,西与陕西吴堡县隔河相望。
- 面积:全镇面积约为108.45平方公里(或根据最新数据为108.78平方公里)。
- 行政归属:隶属于山西省吕梁市临县。
二、历史背景
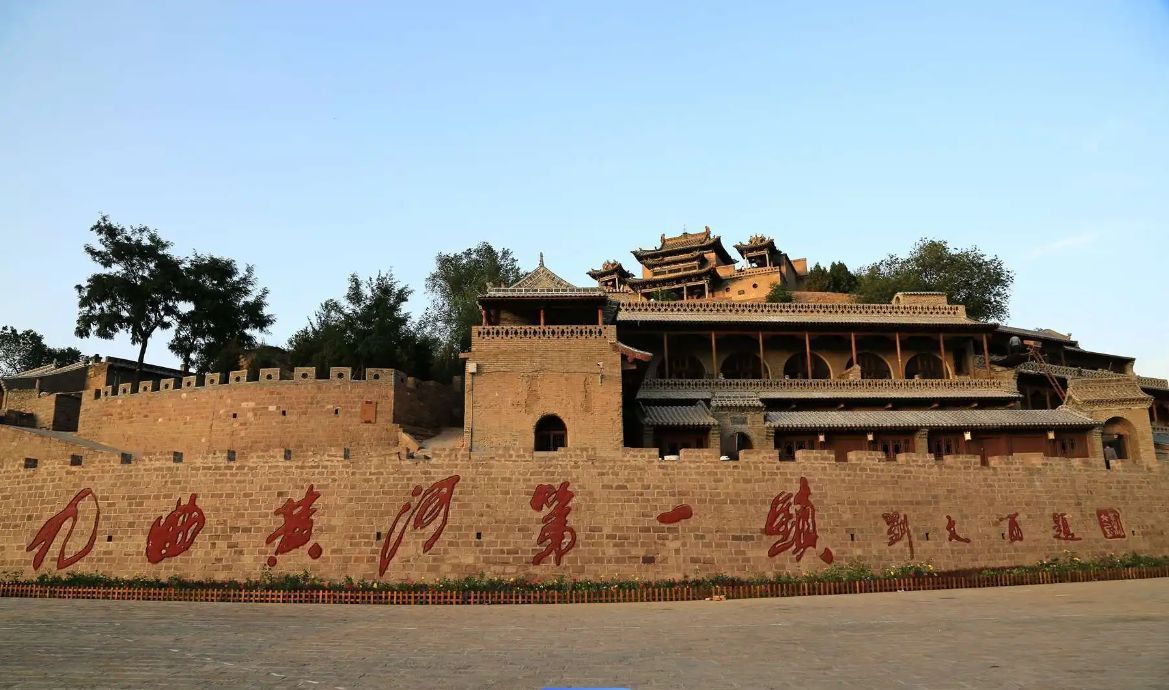
- 碛口古镇在明清至民国年间,凭借黄河水运一跃成为北方商贸重镇,享有“九曲黄河第一镇”之美誉,是晋商发祥地之一。
- 古镇的繁荣得益于黄河大同碛的惊险,大同碛号称“黄河第二碛”,水急浪高,船筏难以通行,使得碛口成为黄河北干流上水运航道的中转站。
- 在鼎盛时期,碛口码头每天来往的船只有150艘之多,各类服务型店肆多达300多家。
三、景点介绍
- 古镇街道:碛口古镇的街道保存了大量的明清时期建筑,包括货栈、票号、当铺等商业性建筑和庙宇、民居、码头等。
- 黑龙庙:位于古镇内,是商人们祈求平安的吉祥路标,也是古镇的标志性建筑之一。
- 西湾村:镇内的西湾村是中国历史文化名村,拥有明清时期古建筑群,与黄土高原相映成趣。
- 其他景点:还包括古渡口、二碛、黄河漂流、红枣园林等,以及以“西湾民居”为代表的一批具有黄土高原建筑特色的晋商“老宅院”。

四、特色美食
- 碛口古镇的美食也很有名,如碗秃、碛口红枣等,都是游客们不可错过的美味。
五、旅游信息
- 开放时间:全年全天开放。
- 交通:碛口古镇交通便利,可通过公路、水路等多种方式到达。
- 住宿:古镇内提供住宿服务,游客可以选择住在窑洞宾馆等特色住宿中体验当地风情。
六、荣誉称号
碛口古镇凭借其独特的地理位置、丰富的历史文化和自然风光,获得了省级风景名胜区、首批省级地质公园、首个省级旅游扶贫试验区等称号,并成为了国内外游客争相前往的旅游胜地。
综上所述,碛口古镇是一座集历史、文化、自然风光于一体的古镇,具有很高的旅游价值和文化意义。

















 7607
7607

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









