




 博主在一场编程竞赛中遭遇挫折,意识到思维敏捷度的重要性。比赛中遇到的难点包括对题目理解不透彻、算法复杂度估算不准确以及未能迅速找到问题关键点。针对这些问题,博主计划通过深入学习组合数学来提高解题能力,期望在下次比赛中取得进步。
博主在一场编程竞赛中遭遇挫折,意识到思维敏捷度的重要性。比赛中遇到的难点包括对题目理解不透彻、算法复杂度估算不准确以及未能迅速找到问题关键点。针对这些问题,博主计划通过深入学习组合数学来提高解题能力,期望在下次比赛中取得进步。
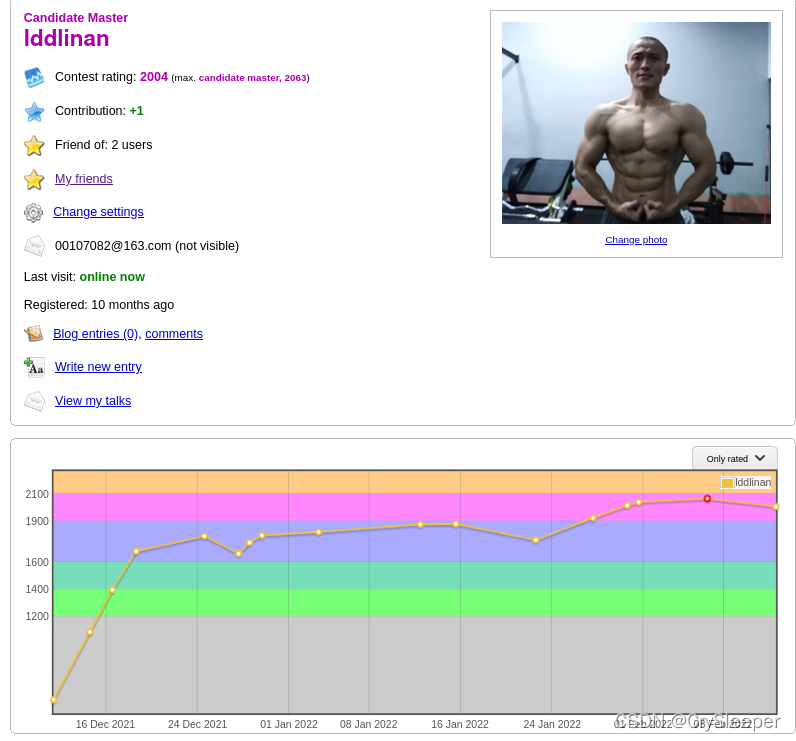
又是掉分的一场比赛,思维的敏捷度还是不行,不太适应CF的题目
rate掉了59,目前2004,属于DIV2的瓶颈阶段,只能完成ABCD,偶尔可以E
而这次比赛感觉思维过于僵化,ACE的简单的突破点都没有抓住,简单复盘以下:
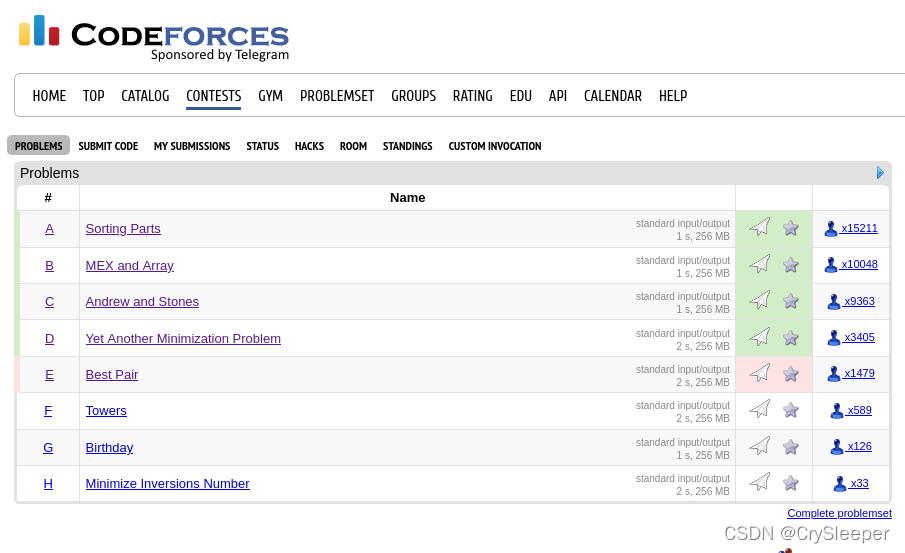
A. 没认真读题,上来就WA了一次,然后整个比赛人就不好了。我的想法是求前缀最大值和后缀最小值;而这题的突破点其实只是是否存在逆序....
B. 数据规模100, 所以朝n**3的复杂度的算法想就基本没大问题
C. 又是想复杂了的题,我的想法是通过从左向右清理然后再从右向左清理来判断是否可以完全清理,但实际上还需要额外一次清理才能确认可以完全清理,还好pretest的测试检测到了,要是等system test,那估计得掉100分;其实只有两种不能清理的情况,如果能分析得精确一点,就会发现完全不需要那么复杂
D. DP,数据规模也很小,100,思路是挺好想的。
E. 比赛是没有发现突破点:频率最多有sqrt(n)个不同的值,这是可以尝试遍历的
最近在研读组合数学,希望能在思路敏捷度上有所提升
下次加油~

















 1584
1584

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









