




 该文章介绍了如何在一个已排序的整数数组中使用O(logn)时间复杂度的二分查找算法,找到目标值的插入位置,以便保持数组的有序性。通过不断比较中间元素与目标值,确定目标值在左侧、右侧或插入位置。
该文章介绍了如何在一个已排序的整数数组中使用O(logn)时间复杂度的二分查找算法,找到目标值的插入位置,以便保持数组的有序性。通过不断比较中间元素与目标值,确定目标值在左侧、右侧或插入位置。
给定一个排序数组和一个目标值,在数组中找到目标值,并返回其索引。如果目标值不存在于数组中,返回它将会被按顺序插入的位置。
请必须使用时间复杂度为 O(log n) 的算法。
示例1: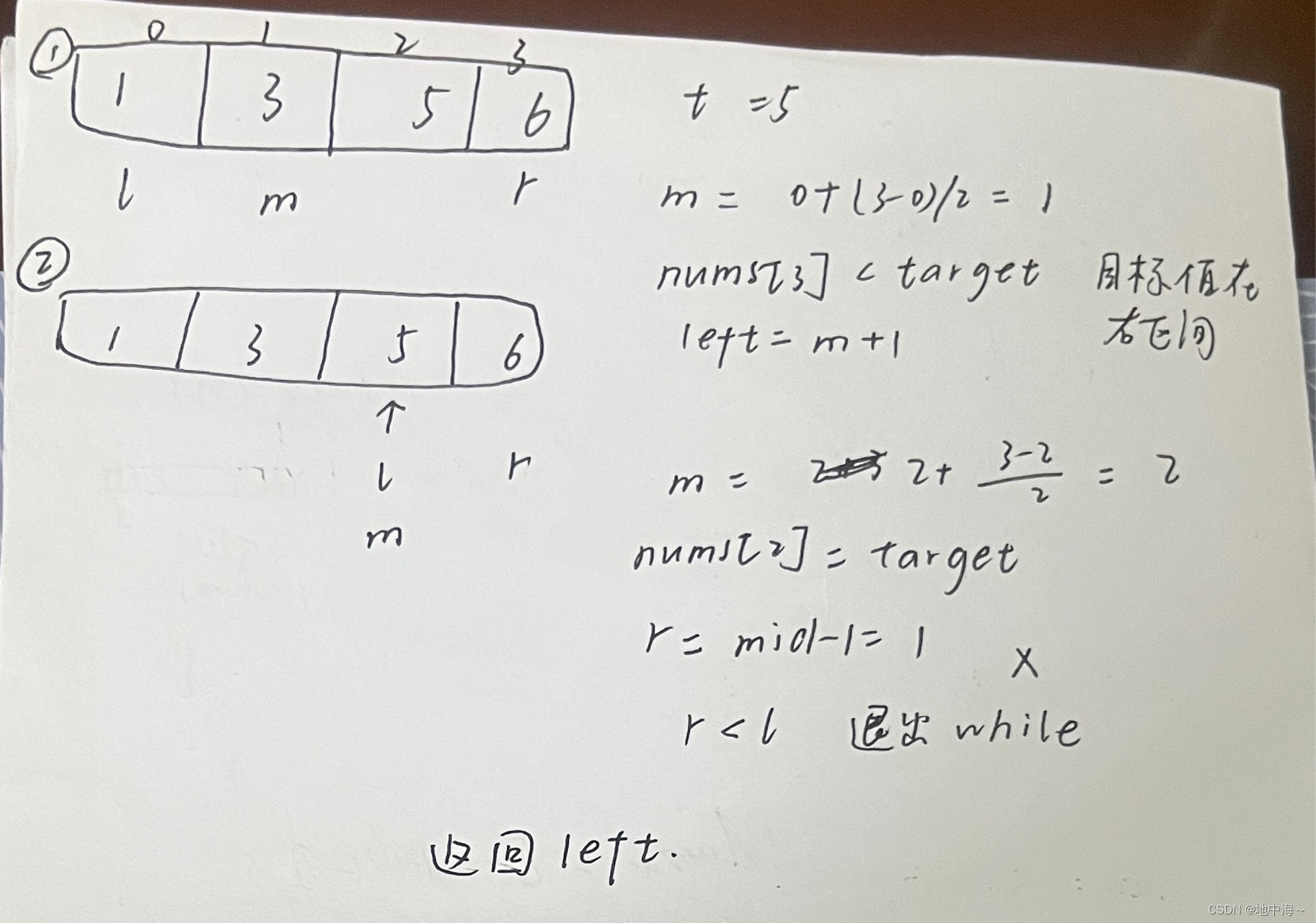
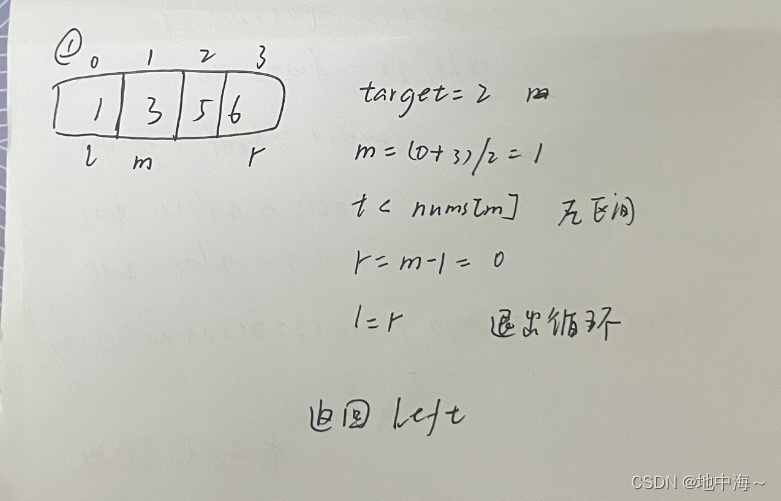
示例2:
int searchInsert(int* nums, int numsSize, int target) {
int right = numsSize - 1, left = 0, mid = 0;
while(left <= right){
mid = left + (right-left) / 2;
if(nums[mid] < target)//目标值在右区间
left = mid + 1;
else //存在:目标值在左区间或mid处,不存在:左区间或者left处
right = mid - 1;
}
return left;//找到目标值或没找到直接在mid出插入
}

















 2608
2608

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









