




 本文详细介绍了摄像头中ImageSensor的两种主要类型——YUVSensor和RawSensor,包括它们的数据格式、处理流程及优缺点。此外,还讲解了硬件接口中的并行与串行接口,特别是mipi接口的工作原理。同时,阐述了相机中的关键概念如三路电压、I2C信号、lane数量、数据格式、时钟信号和mipi信号等,帮助读者深入理解摄像头技术。
本文详细介绍了摄像头中ImageSensor的两种主要类型——YUVSensor和RawSensor,包括它们的数据格式、处理流程及优缺点。此外,还讲解了硬件接口中的并行与串行接口,特别是mipi接口的工作原理。同时,阐述了相机中的关键概念如三路电压、I2C信号、lane数量、数据格式、时钟信号和mipi信号等,帮助读者深入理解摄像头技术。
1,Image Sensor类型
a) YUV Sensor
YUV Sensor输出的Data格式为YUV,图像的效果处理使用Sensor内部的ISP,BB端接收YUV格式的data后只进行格式的转换,效果方面不进行处理,由于Sensor内部的ISP处理能力有限,且YUV Sensor的数据量比较大(YUV422的格式1个pixel2个byte),一般Size都比较小,常见的YUV sensor都是5M以下
b) Raw Sensor
Raw Sensor输出的Data格式为Raw,图像的效果处理使用BB端的ISP,BB端接收Raw data后进行一系列的图像处理(OB,Shading,AWB,Gamma,EE,ANR等),效果方面由BB端控制,需要针对不同的模组进行效果调试,Raw sensor是目前的主流,数据量比YUV Sensor小(RAW10 格式的sensor 1个pixel 10个bit)使用平台ISP处理,能支持较大的size
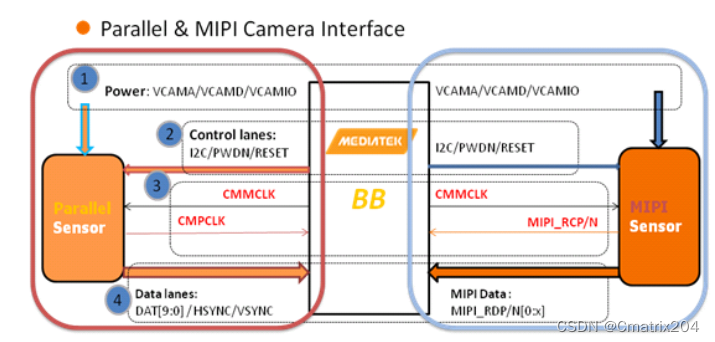
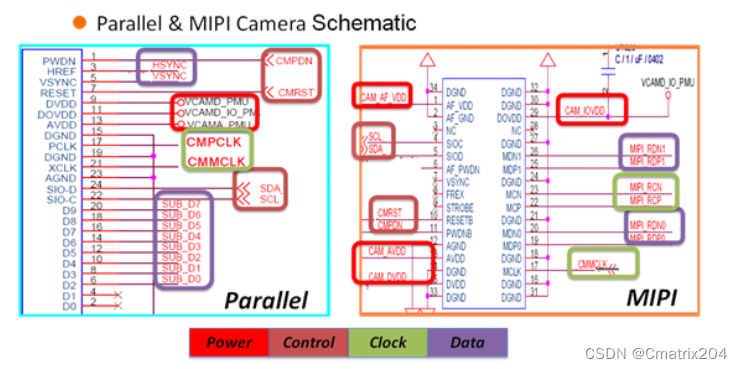
2,硬件接口
简单说来,Camera的接口分为并行和串行两种方式,而目前我们平台主要支持的串行方式为mipi接口,Parallel接口和mipi接口的介绍可以参考下图
3,常见基本概念
a) 三路电压
camera包含的三路电压为模拟电压(VCAMA),数字电压(VCAMD),IO口电压(VCAMIO)
b) I2C信号
BB与Sensor端通过I2C来通信(读写寄存器),包括SCL(I2C Clock) SDA(I2C Data)信号
c) mipi几条lane
mipi data是成对的差分信号,MIPI_RDN和MIPI_RDP,有几对这样的pin脚,则说明是几条lane,同一颗sensor由于register setting不同,输出的信号有可能是2 lane或者4lane等
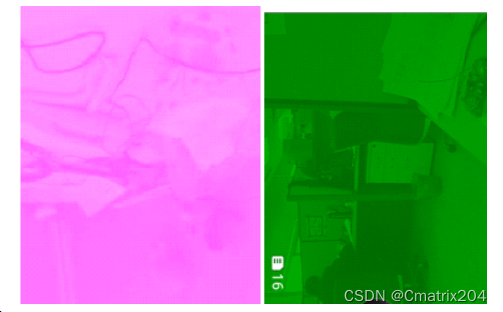
d) parallel高低八位
Parallel接口一般Data有10根pin,分别叫做Data0~Data9,Parallel sensor输出的data信号是8根pin时,这八根pin接到的是Data0~Data7还是Data2~Data9,需要配置正确,叫做接到高八位或者低八位,接错了可能产生如下现象
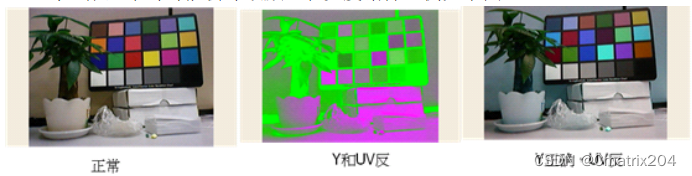
e) Data Format
Sensor输出的数据格式,对于YUV Sensor来说,Data Fomat一般有YUYV,YVYU,UYVY等,配置不对可能会导致颜色和亮度错掉,例如下图
对于Raw Sensor来说,Data Format就是First Pixel的颜色,分为R,Gr,Gb,B,配置不对会导致颜色错误
f) MCLK
BB提供给Sensor的外部clock
g) PCLK
Parallel接口的Sensor输出的clock,该clock变化一次,data更新一次
h) mipi 信号
mipi信号包括mipi clock和mipi data,该信号是高速信号,用来传输mipi数据包

















 2726
2726

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









