



主要了解慢衰减模式与快衰减模式的区别,这些名称的由来,以及它们如何影响电机减速。
本文探讨了慢衰减模式和快衰减模式的区别,这些名称的由来以及它们如何影响电机减速。
我对衰减模式的个人介绍
在今年初的一个 PCB 设计项目中,我需要为一个无刷直流电机(BLDC)实现双向旋转控制(顺时针与逆时针)。虽然理论上可以通过分立的功率 MOSFET、续流二极管以及微控制器的 GPIO 引脚手动构建 H 桥来实现方向控制,我也确实倾向于尝试这种自定义方案,但在评估器件时,我发现了德州仪器(TI)推出的集成式电机驱动芯片 DRV8801PWPR,它极大地简化了我的设计流程。
DRV8801 是一款高度集成的 H 桥电机驱动器,内置功率 MOSFET,支持多种工作模式,包括慢衰减(slow decay)和快衰减(fast decay)电流调节模式。此外,该器件还具备低功耗睡眠模式,非常适合电池供电等对能耗敏感的应用场景。
值得一提的是,像 Maxim Integrated 的 MAX14870 这类器件也集成了 H 桥结构,并曾在我们的 C-BISCUIT 项目中用作电机控制器。然而,也有一些驱动 IC 并不集成功率 FET,而是作为栅极驱动器使用,允许设计者根据系统需求选择外部 MOSFET。例如,Diodes Incorporated 推出的 DGD0506 就是一款适用于此类应用的双通道栅极驱动 IC。
在深入探讨不同电流衰减模式对电机性能的影响之前,有必要先回顾一下 H 桥的基本工作原理。这将有助于理解这些模式如何影响电机动态响应、效率及能量回馈特性,从而为后续优化控制策略提供理论基础。
H 桥——简短回顾
H 桥是一个相当简单的电路。它包含四个独立控制的 MOSFET(或 BJT,但现在更常用 MOSFET)作为开关元件,用于将电流引导通过负载——通常是感性负载,如电机。下图 1 显示了 H 桥中的"H"。
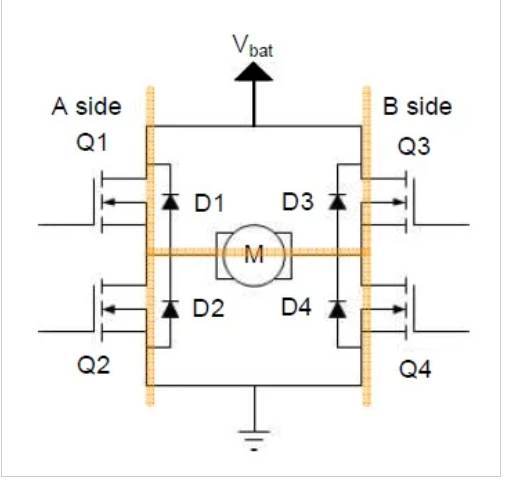
图 1. H 桥电路图;两条电流路径共同构成了字母"H"的形状。
外部二极管——通常称为自由轮二极管或反激二极管——并不总是包含在 H 桥电路中,因为 FET 的体二极管可以替代它们。
使用 H 桥时需注意:切勿同时打开同一侧的两个 FET,即 Q1 和 Q2,或 Q3 和 Q4。这样做会在正极轨和地之间形成极低阻抗的路径,由此产生的高电流——通常称为"直通"——可能会损坏 FET。
快速衰减模式
我之前提到的直流电机项目要求电机在关闭时能快速停在一个特定位置。因此,基于这个需求,我最初确信使用快速衰减模式是必要的。可以合理地假设“快速衰减”对应于快速减速。我错了。在查阅相关资料后,我意识到“ 慢衰减 ”和“ 快衰减 ”这两个术语与电感中的电流流动有关,而与直流电机的行为没有直接关系。
总结这一点:不要认为快速衰减会快速停止电机,因为实际情况恰恰相反。
“快速衰减模式”的名称指的是这种模式允许电机的线圈电流非常快速地衰减到零。下图 2 描绘了电流从 Vbat 开始,经过 Q1、电机绕组,再经过 Q4 到达地节点的电流流动。在这种情况下,电机被通电并正常运转。
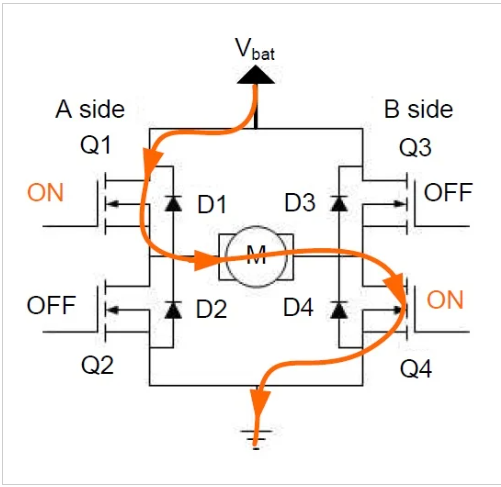
图 2。 电机通电正常运转。
众所周知,电感中的电流与电容两端的电压一样,不能发生突变。当 Q1 和 Q4 被关断时,电感电流仍需维持其流通路径,因此它将通过反激二极管或 MOSFET 的体二极管继续流动,该电流将在流经电路寄生电阻的过程中逐渐衰减至零。
快速衰减模式是一种通过启用特定的 FET(而非依赖二极管)为感性电流提供续流路径的技术,从而加速电流的衰减过程。如图 3 所示,在此模式下,Q2 和 Q3 被导通,而 Q1 和 Q4 均处于关断状态。这种方式能够有效提升电流衰减速度,适用于对响应时间和动态性能有较高要求的应用场景。
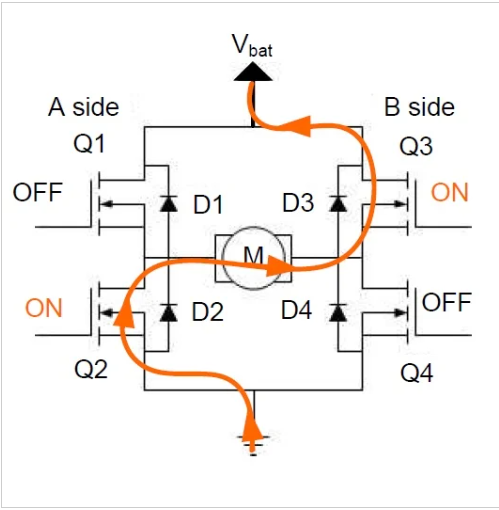
图 3。Q2 和 Q3 启用(快速衰减模式)。 通过同时导通 Q2 和 Q3,我们再次将电源电压施加于电感之上,但此时电压的极性与电流方向相反,从而促使电感中的电流加速衰减。
需要特别注意的是,**直通(shoot-through)是一种绝对禁止的操作状态**。为了避免上下桥臂同时导通造成短路,在切换 FET 状态时,必须遵循“先断后通”的原则——即在开启一个 FET 之前,必须确保对应的互补 FET 已完全关断。幸运的是,使用如 DRV8801 等集成电机驱动芯片时,这种时序控制由芯片内部自动完成,无需用户手动干预。
在实际应用中,是否启用快速衰减模式取决于具体需求。如果不选择快速衰减,也可以依靠反馈二极管(或驱动器内部的寄生体二极管)来实现电流续流。然而,这些二极管的导通时刻具有不确定性,可能对某些应用产生影响。
根据德州仪器(TI)社区支持页面的说明:“通常情况下,快速衰减模式对于高电感电机、高速运行或高分辨率微步进控制尤为重要,因为这些应用场景要求电流能够快速变化。**”此外,当 FET 的导通压降不足以驱动二极管正向导通时,采用快速衰减模式还可以有效降低系统功耗。
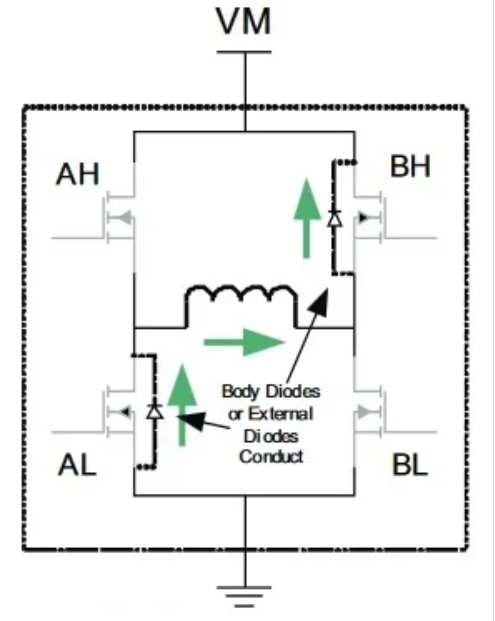
图 4。 作为快速衰减模式的替代方案,您可以使用内部二极管或外部续流二极管为衰减的感性电流提供一条路径。图片由 TI 的 SLVA321 应用笔记(图 3) 提供。
慢速衰减模式
让我们重新回到图 2,其中电机正常运行。现在,我们不会像快速衰减模式那样(图 3)关闭 Q1 和 Q4,然后打开 Q2 和 Q3,而是将 Q1 禁用并启用 Q2(见下文图 5)。
***注意:慢衰减模式可以使用低边 FET 或高边 FET。
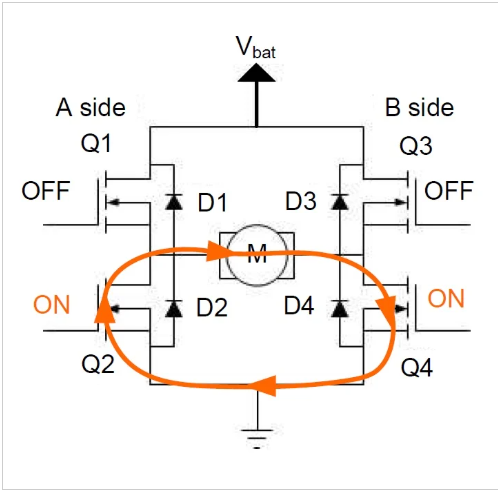
图 5。Q2 和 Q4 启用(慢衰减模式)。
当电流通过 Q2 和 Q4 以循环方式流经电感时,该电流将逐渐减小至零。在此过程中,并无外加电压促使电流快速衰减;相反,电流主要在流经电感本身的寄生电阻以及两个 FET 的导通电阻(Rds(on))时,以焦耳热的形式被耗散。
虽然这种电流衰减过程相对较慢,但它能够更迅速地降低电机的转速。当直流电机旋转时,其内部会产生反电动势(Back EMF),可以视为电机惯性运动或动能储存的表现形式。在所谓的“快衰减模式”下,尽管电流迅速下降,但电机仍会依靠其存储的动能继续滑行,直至角速度缓慢降至零。
当我们导通 Q2 和 Q4 时,在两个电机端子之间建立了一条低阻抗路径,实质上是将电机绕组短路。这一操作有效地将反电动势短接,从而加速了电机中储存能量的释放。由此带来的结果是电机转速迅速下降,甚至出现明显的制动效果。因此,“快衰减模式”与电机的制动行为密切相关。
需要注意的是,“慢衰减”和“快衰减”这两个术语,描述的是电感性负载(如电机绕组)中电流的衰减速率,而非直接反映电机角速度的变化速率。
。
总结
快速衰减模式会导致电感电流迅速减少,并使电机滑行至零速度。慢速衰减模式会导致电感电流较慢地减少,但会产生快速减速。
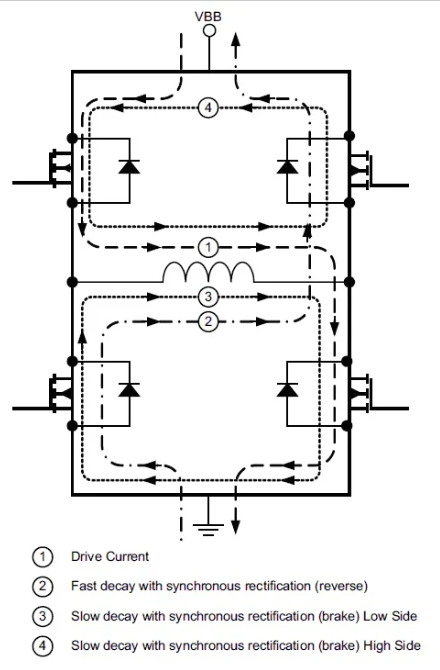
下图6总结了这两种衰减模式的电流路径。


















 8101
8101

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









