



A655SC搜索不到IP
1.卸载当前电脑所用的ebus驱动程序(例如eBus Player for JAI)
2.关闭防火墙,关闭网络,关闭杀毒软件
3.重启电脑
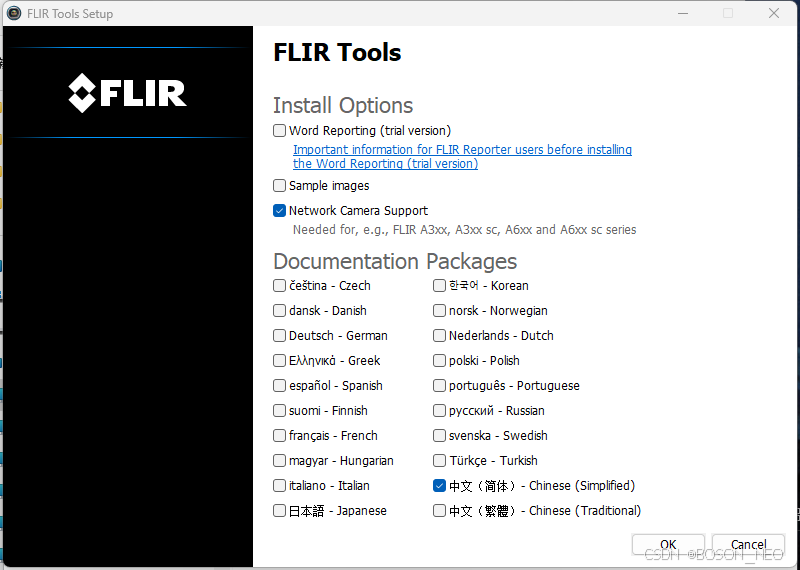
3.下载FLIR Tools (5.7)版本 (安装时仅勾选NETWORK),ResearchIR
4.重启电脑
A70外部报警触发
通过A70后端12pin电源供电(DC48V,1白负,2棕正),然后链接数字输入端子(9DIGIN1,12DIGIN_RTN接地),通过网页端链接热成像仪,通过北京触发盒软件(端子3接入9DIGIN1,端子11接入12DIGIN_RTN),触发信号
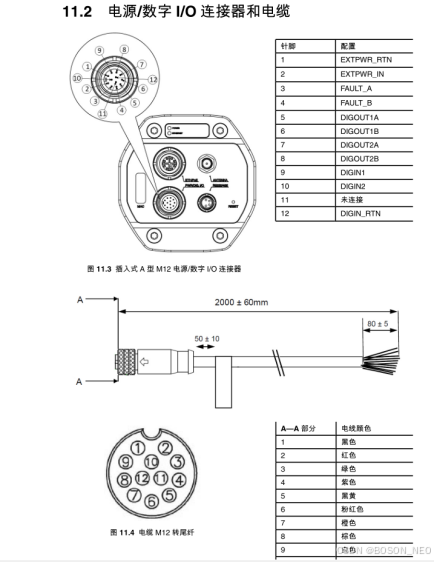
A700接线定义:
1白色 2棕色 3绿色 4黄色 5灰色 6粉色 7蓝色 8红色 9黑色 10紫色 11灰橙色 12红蓝色 外壳接地粗黑色
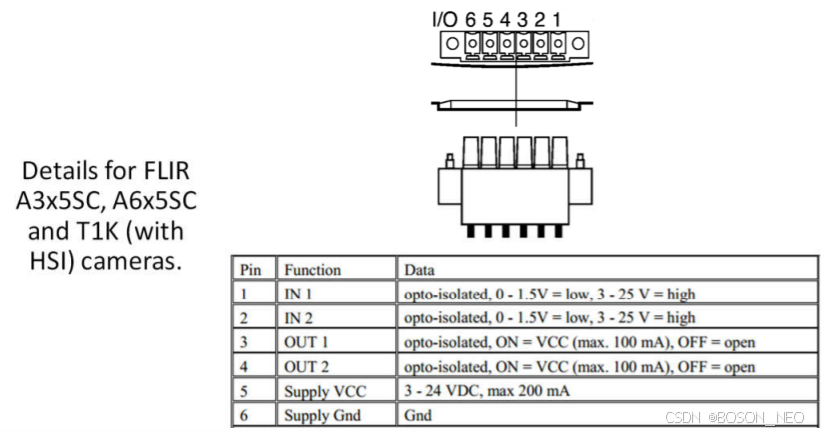
A600外部报警触发
通过A70后端自身电源供电(DC24V),然后链接数字输入端子(6Gnd接地,1DIGIN),通过FLIR Thermal Studio端链接热成像仪,通过北京触发盒软件(端子1接入1DIGIN,端子3接入6Gnd),触发信号
AX8(卡片机)常见IP序列 169.254.81.XX
A6XX(在线式)常见IP序列 192.168.1.XX

















 738
738

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









