



点击下方卡片,关注“自动驾驶之心”公众号
>>自动驾驶前沿信息获取→自动驾驶之心知识星球
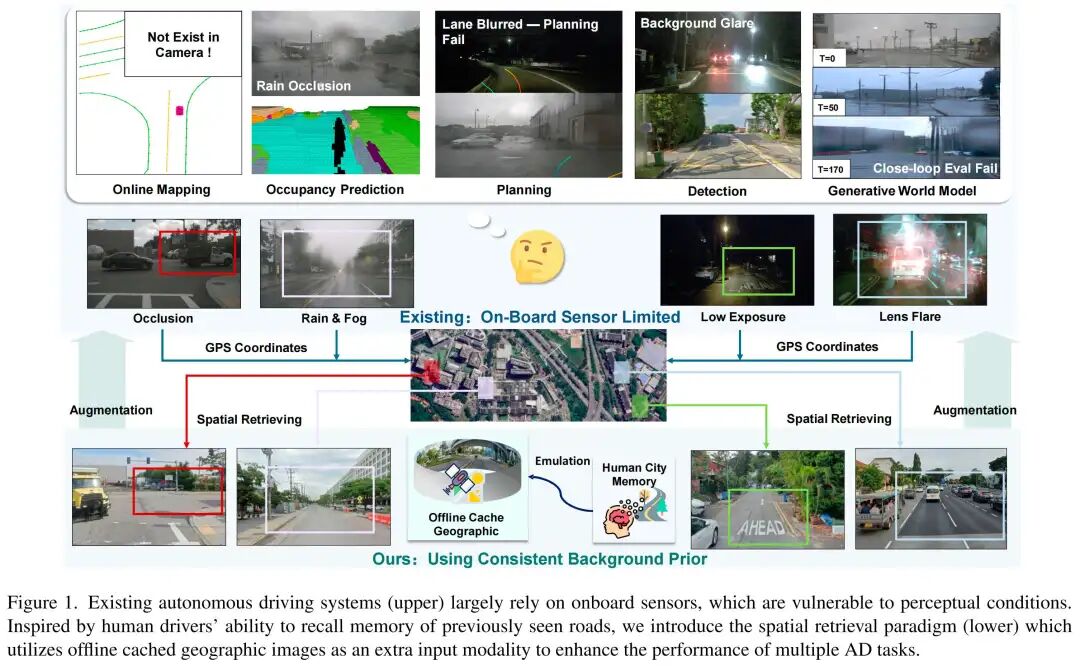
现有自动驾驶系统非常依赖车载传感器进行实时精确的环境感知。然而,这种模式受行驶过程中的感知范围限制,在视野受限、遮挡或黑暗、降雨等极端条件下常出现性能失效。相比之下,人类驾驶员即使在能见度不佳的情况下,仍能回忆起道路结构。为了让模型具备这种“回忆”能力,针对这个特点,复旦可信具身智能和上交等合作,将离线检索的地理图像作为额外输入引入系统。这些图像可从离线缓存(如谷歌地图或已存储的自动驾驶数据集)中轻松获取,无需额外传感器,是现有自动驾驶任务的即插即用型扩展方案。
在实验中,首先通过谷歌地图API检索地理图像,扩展了nuScenes数据集,并将新数据与自车轨迹对齐。并在五个核心自动驾驶任务上建立了基准:目标检测、在线建图、占用预测、端到端规划和生成式世界模型。其中在线建图mAP提升13.4%,占用预测静态类mIoU +2.57%,夜间规划碰撞率从0.55%降至0.48%,为复杂场景自动驾驶提供低成本、高鲁棒的感知增强方案。大量实验表明,该扩展模态能够提升部分任务的性能。我们将开源数据集构建代码、数据及基准测试,为这一新自动驾驶范式的后续研究提供支持。
论文标题:Spatial Retrieval Augmented Autonomous Driving
论文链接:https://arxiv.org/abs/2512.06865
项目主页:https://spatialretrievalad.github.io/
自动驾驶之心非常荣幸邀请到复旦大学可信具身智能研究院的贾萧松教授,为大家分享这篇最新的工作。周三晚上七点半锁定自动驾驶之心直播间~


















 799
799

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









