



作者 | 天南 来源 | 天南AI
点击下方卡片,关注“自动驾驶之心”公众号
>>自动驾驶前沿信息获取→自动驾驶之心知识星球
本文只做学术分享,如有侵权,联系删文
在今天,他们发布了自己的首款轮式+灵巧手产品,G1-D。

这不仅仅是战略补位。而且,
训练完全的一条龙服务,你就提供叠衣服数据就完事了。
非常的easy,你甚至都不需要懂代码,门槛几乎降低到了0,对于想要骗天使轮的团队而言,简直是晴天霹雳。
# 先补一点知识
跳舞和双手操作在市场上一直都是两个流派。
以特斯拉、FigureAI为代表,这些都是死磕AI自主操作,也就是双手能力。
而以宇树为代表,更多是死磕运动控制,也就体现在双足能力。
那 双手操作 + 双足后空翻 都玩得好的机器人产品有吗?
一个都没有。
这两个行业现在可以说是在并行发展,双手自主沿着模仿学习VLA进行,后空翻是沿着强化学习进行。
不过从公司的发展角度,我们可以看到一些互相跨界的趋势。
拿智元产品线来举例子。
灵犀(小尺寸人形)开始后空翻了,精灵(轮式)开始卷灵巧手操作了,智元是每一个方向都不想放弃。

当然,智元这也跟每个产品线的老大有关系(高工机器人年会上,王闯曾提到,智元产品线老大针对自己产品线的发展具备绝对决策权。)
在聊回宇树。
宇树这次明确的战略补位,补上了自己最缺的灵巧操作的一环。
并且还把这个行业的门槛降低几乎为0的状态。
# 相比于G1哪里变了
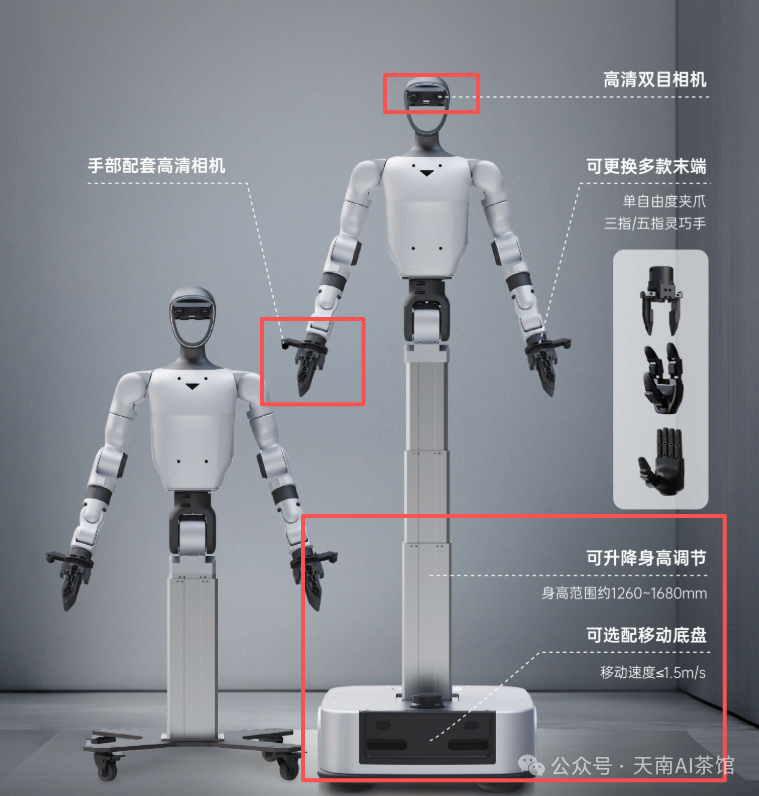
整体变得不多,砍掉了G1的双腿,手部从假手套换成了配备高清相机的夹爪,而且增加了高清双目相机。
相比于原来的G1,最主要多的就是高清摄像头。
这里面是有点意思。
因为目前科研界也是分为两个流派,一个是使用Franka机械臂+手臂摄像头来进行灵巧操作;一个是使用G1本体进行运动控制。
而且目前几天Gen0使用的27万小时的数据,全部都是使用夹爪+手臂摄像头完成的。
宇树这复刻G1运动控制的道路的野心,已经再也藏不住了。
那为什么要砍掉双足呢?
因为双足 + 双手的同时控制很难,并且现在除了特斯拉和FigureAI,很少有公司愿意同时探索这两条路线。
或者说这大概是两拨人。
而改成了轮式后,又能够保证安全性,又容易简单控制。
轮式+双手,大概率是接下来专攻大脑的公司的下一步计划。
宇树甚至贴心的帮你准备了选配方案,如果你没钱又想探索灵巧操作的话,那就可以不选配移动底盘。
# G1-D会卖给谁?
市场上有不少二道贩子,专门买了G1来做租赁,做跳舞表演,各大商场巡回演出,主要是满足用户的好奇心。

这部分人肯定是用不到上了。
这次的G1-D对于他们相当“无聊”,不能后空翻,只能双手能动,还要极强的开发能力才能实现自主操作。
G1-D这次的目标用户非常明确:
就是想要做灵巧操作的科研者还有着急在AI场景落地机器人的创业公司。
# 宇树的野心
这次不仅仅是提供一个轮式本体,更是提供了一整套的解决方案,从数据采集,到模型训练一条龙服务。

就比如我是个人开发者,我现在买台G1-D回家,就自己在家通过遥控采集数据,采集完了以后,宇树居然还提供现成的模型还有训练平台!
这意味着你连GPU都不用租,就直接用宇树自己的集群和工具就能训练。
合着你就采集了一波自己数据 + 点点配置。

快的话,几天吧,就可以有一个加载全球顶尖开源模型,的轮式双足机器人可以在家给你擦桌子,洗碗了。
这让之前复杂的开发成本降低了好几个数量级。
不过对于想要混天使轮的团队而言,简直是晴天霹雳。创业公司想要仅仅叠个衣服,拿个饮料就能融资,难上加难了。
放在25年底,你拿个叠衣服的VLA demo出来,根本拿不出手,更不用说,现在门槛降低0的情况了。
# 写在最后
2025年的发展简直太快了,一旦大家愿意投入精力和资金。这个行业的发展一天一个样。
拿双足控制而言,
春晚的时候,宇树H1那木讷的样子大家都觉得很厉害。
到了25年底,跟着小姐姐学跳舞和连续后空翻,大家都觉得理所应当了。
灵巧操作这边也一样,
年初的时候,叠个衣服,拿个快递已经被夸上天。
现在随着π0.5、gen0出来,你会发现大家早就不满足看叠衣服了,要看你连续规划的能力,看你自主对话并做出肢体反馈的能力。
一年而已,天翻地覆。
这个行业就是需要更多的关注度和资金涌进,才能持续的热下去。
所以,2026年,你是打算投钱、投人、还是就投个关注度呢?
自动驾驶之心
论文辅导来啦

自驾交流群来啦!
自动驾驶之心创建了近百个技术交流群,涉及大模型、VLA、端到端、数据闭环、自动标注、BEV、Occupancy、多模态融合感知、传感器标定、3DGS、世界模型、在线地图、轨迹预测、规划控制等方向!欢迎添加小助理微信邀请进群。

知识星球交流社区
近4000人的交流社区,近300+自动驾驶公司与科研结构加入!涉及30+自动驾驶技术栈学习路线,从0到一带你入门自动驾驶感知(大模型、端到端自动驾驶、世界模型、仿真闭环、3D检测、车道线、BEV感知、Occupancy、多传感器融合、多传感器标定、目标跟踪)、自动驾驶定位建图(SLAM、高精地图、局部在线地图)、自动驾驶规划控制/轨迹预测等领域技术方案、大模型,更有行业动态和岗位发布!欢迎加入。

独家专业课程
端到端自动驾驶、大模型、VLA、仿真测试、自动驾驶C++、BEV感知、BEV模型部署、BEV目标跟踪、毫米波雷达视觉融合、多传感器标定、多传感器融合、多模态3D目标检测、车道线检测、轨迹预测、在线高精地图、世界模型、点云3D目标检测、目标跟踪、Occupancy、CUDA与TensorRT模型部署、大模型与自动驾驶、NeRF、语义分割、自动驾驶仿真、传感器部署、决策规划、轨迹预测等多个方向学习视频
学习官网:www.zdjszx.com

















 3万+
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









