 自动驾驶的竞争新格局
自动驾驶的竞争新格局




作者 | BigBite 来源 | BigBite思维随笔
点击下方卡片,关注“自动驾驶之心”公众号
>>自动驾驶前沿信息获取→自动驾驶之心知识星球
本文只做学术分享,如有侵权,联系删文
(下面仅作者戏言,各位读者权当图一乐就好)
自动驾驶行业正步入一个类似从“春秋”迈向“战国”的关键转折期。
在春秋时代,诸侯争霸仍讲究“名分”,战争多以迫使对方承认为目的,并未意图完全吞并。而到了战国,周天子权威彻底瓦解,战争目标转变为彻底的领土兼并和天下统一,小诸侯陆续被消灭,最终形成“七雄”对峙、秦灭六国的局面。
当前的行业态势与之高度相似。随着Tesla不再公开技术细节,各家的技术路线必然走向分化。落后企业不仅面临技术差距,更可能因路线错误而彻底掉队。正如战国时期,各国通过深度变法强化实力,法家助力秦国打造成高效的战争机器,最终实现一统。
如今,自动驾驶领域的竞争已不再是梯队间的“排位赛”,而是一场生死之战。输家将失去持续研发的资格与资源,最终只有头部玩家能够存活壮大,第二梯队及之后的参与者,难逃被整合或淘汰的命运。
技术路线之争
2022年的Tesla AI Day II虽成绝唱,但其提出的BEV、Occ等感知理念,至今仍深刻影响着自动驾驶技术的发展方向。随着主流厂商逐步掌握这些基础能力,为在下一阶段竞争中突围,探索差异化技术路线已成为必然选择。
一时间,行业技术路径呈现显著分化:曾经被认为是国内企业相比Tesla的优势传感器LiDAR被一些团队放弃,转而选择了纯视觉方案;在地图使用方面,有的公司仍旧坚持探索众包地图方案作为自动驾驶的先验信息,有的公司则开始了强感知的无图方向,将功能推向了全国都能开的阶段;
在规控层面,头部公司逐渐利用时空联合规划算法取代了传统分离式规划算法,部分团队开始探索端到端自动驾驶设计,但也有观点认为,保留中间结构化输出的“两段式端到端”是更务实的过渡方案。与此同时,多模态大模型被寄望于破解长尾场景难题,可微分渲染技术为场景重建与数据生成带来新可能,强化学习也再度走入视野,成为应对决策逻辑困境的探索方向。
技术名词层出不穷,甚至出现概念对立的叙事——例如VLA与World Model本不存在技术方案上的矛盾,完全可以兼容并济,却被渲染为路线之争。然而喧嚣背后,新技术成熟度尚待打磨。尽管创新词汇有助于品牌占位,实际用户体验仍受限于大量规则代码与兜底策略,进入一段体验提升的平缓期。
供应商模式的反击
当技术体验进入平台期,头部自动驾驶团队之间的差距正逐渐缩小。曾经只有少数新势力车企才具备的高阶智驾功能,随着顶级供应商方案的成熟,已开始下放至更多入门车型。当网约车也普遍搭载智能驾驶功能时,这项技术的光环随之褪去,“科技溢价”逐渐消失,汽车行业的竞争被拉回地面,陷入以价格战为核心的贴身肉搏。
在这一背景下,规模庞大的自研智驾团队面临沉重的成本压力。如果技术迭代难以带来显著的体验优势,维持高薪研发团队并承担高昂的NV税成本,对多数车企而言将是难以持续的重负。相比之下,供应商方案仅需少量对接人员,即可提供市场上成熟的一线智驾能力。对于自研能力尚未进入第一梯队的车企而言,切换至供应商方案不仅是降本之举,甚至可能是产品力的直接提升。
这笔账清晰而残酷。在生存压力空前的当下,越来越多传统车企与二三线品牌难以拒绝“交出灵魂”的选择。毕竟,若连“身体”都已难保,“灵魂”又将何存?这样的趋势持续下去,甚至头部新锐车企最近都发生了自动驾驶团队高层更迭,淡出的情况。
数据壁垒是局面反转的关键
当前自动驾驶技术陷入平台期,核心原因在于数据驱动的新方案尚未完全成熟,系统仍严重依赖规则算法作为核心保障。然而,规则系统的性能天花板早已被行业探明,其对所有玩家一视同仁——今天制约头部团队的问题,终将同样阻碍追赶者,最终拖慢整个行业的发展速度。
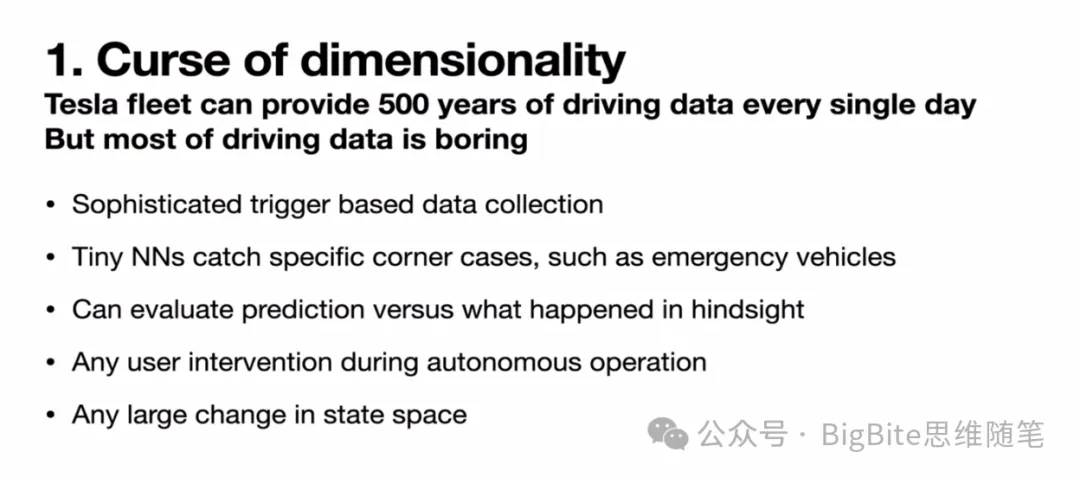
而突破行业发展瓶颈的方法其实大家也都清楚,就是进一步拥抱自动驾驶数据驱动和模型化。现如今随着各大头部供应商水平迎头赶上,行业里似乎对于数据壁垒的笃定再次动摇了起来。既然顶级供应商可以通过间接收集和大量采集车采集可以追上头部企业,而大量以面向二级市场甚至VC作为商业模式的自动驾驶供应商可以暂时忽略毛利率和净利率的影响,专心抢占自动驾驶市场份额,如果头部车企数据壁垒不再,必然会在巨大的盈利压力下陷入被动。那么曾经是头部量产车企最引以为傲的大量丰富,高度传感器一致性的真实世界数据到底是不是自动驾驶行业制胜的关键?
Tesla FSD V14的发布实际上进一步给自动驾驶技术进步指明了方向。在刚刚公布的Tesla ICCV技术分享FSD V14的技术突破——ICCV Ashok技术分享解析中,Tesla基于FeedForward 3D Gaussian重建技术和生成式世界模型技术为我们展现仿真数据生成效果十分惊艳,然而我们发现无论Tesla在重建和生成式上技术有多么成熟,大量丰富的真实世界数据仍旧是Tesla认为他们提升自动驾驶AI水平最关键的要素!原因无他,即使如今生成式AI异常强大,其细节的真实性距离真实世界采集数据仍旧有着显著的差别,而且就算仿真数据在拟真度上已经和真实数据难分伯仲,目前以及可见的未来仿真数据也无法在丰富多样性上达到真实世界的水平,因为我们坐在办公室里永远无法想象现实世界会有多么离奇的Corner Case出现。
因此,不是数据壁垒不存在,而是当下新技术还没有办法成熟完善的今天,如果我们不能减轻对规则算法的依赖,就没有办法突破自动驾驶技术发展的平台期,没有办法使用数据驱动的范式将自动驾驶体验再提高一个台阶。
自动驾驶之心
论文辅导来啦

自驾交流群来啦!
自动驾驶之心创建了近百个技术交流群,涉及大模型、VLA、端到端、数据闭环、自动标注、BEV、Occupancy、多模态融合感知、传感器标定、3DGS、世界模型、在线地图、轨迹预测、规划控制等方向!欢迎添加小助理微信邀请进群。

知识星球交流社区
近4000人的交流社区,近300+自动驾驶公司与科研结构加入!涉及30+自动驾驶技术栈学习路线,从0到一带你入门自动驾驶感知(大模型、端到端自动驾驶、世界模型、仿真闭环、3D检测、车道线、BEV感知、Occupancy、多传感器融合、多传感器标定、目标跟踪)、自动驾驶定位建图(SLAM、高精地图、局部在线地图)、自动驾驶规划控制/轨迹预测等领域技术方案、大模型,更有行业动态和岗位发布!欢迎加入。

独家专业课程
端到端自动驾驶、大模型、VLA、仿真测试、自动驾驶C++、BEV感知、BEV模型部署、BEV目标跟踪、毫米波雷达视觉融合、多传感器标定、多传感器融合、多模态3D目标检测、车道线检测、轨迹预测、在线高精地图、世界模型、点云3D目标检测、目标跟踪、Occupancy、CUDA与TensorRT模型部署、大模型与自动驾驶、NeRF、语义分割、自动驾驶仿真、传感器部署、决策规划、轨迹预测等多个方向学习视频
学习官网:www.zdjszx.com


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









