



点击下方卡片,关注“自动驾驶之心”公众号
>>自动驾驶前沿信息获取→自动驾驶之心知识星球
论文作者 | Tianyi Tan等
编辑 | 自动驾驶之心
本文介绍了清华大学AIR研究院联合中科院自动化所、香港中文大学等单位在NeurIPS 2025发表的最新研究成果——Flow Matching-Based Autonomous Driving Planning with Advanced Interactive Behavior Modeling。该工作基于Diffusion Planner进一步改进,提出了全新的自动驾驶决策算法框架—Flow Planner。在高密度车流中的多车博弈、行人突发横穿、狭窄道路的会车与让行,以及插入与并线等激烈竞争场景下,Flow Planner能够像经验丰富的驾驶员一样,动态感知周围意图变化,精准预测潜在风险,并生成自然、流畅、类人的规划轨迹。实验结果显示,Flow Planner在nuPlan闭环评测及新设立的interPlan高交互基准上均取得了学习型算法的SOTA性能。在高密度交通、频繁交互和非结构化场景下,其决策成功率和轨迹质量均显著超越现有扩散模型规划方法,展现了该框架在闭环规划领域的巨大潜力。
论文标题:Flow Matching-Based Autonomous Driving Planning with Advanced Interactive Behavior Modeling
论文链接:https://arxiv.org/abs/2510.11083
项目主页:https://github.com/DiffusionAD/Flow-Planner
背景介绍
自动驾驶规划的核心挑战之一在于:如何在多车密集、行为多样的交通场景中,实现安全、可靠、类人的决策。传统基于规则的规划方法依赖人工定义的行为准则,虽然可解释性强,但在动态、复杂的交通博弈中缺乏泛化能力;而基于学习的规划方法试图直接从海量驾驶数据中学习策略,提升模型的适应性与可扩展性。然而,当前学习型规划方法仍面临两大核心挑战:
博弈行为建模不足——简单地增大模型参数量难以有效捕捉场景中的博弈关系,反而容易导致模型过拟合,出现呆板的驾驶行为。为了有效建模博弈行为而引入的过多人工结构设计,又会显著增大模型复杂度,不利于模型的扩展;
高质量博弈数据稀缺——高密度、强博弈的场景在训练数据中呈现显著的长尾分布,模型难以通过模仿学习在相对有限的训练数据中准确捕捉专家策略的驾驶意图,从而在实际测试中难以做出准确、迅速的决策。
本文希望解决的核心问题是:能否在不引入额外先验知识的情况下,通过模型自身的学习能力,从有限的数据中提升博弈能力? 自动驾驶决策任务通常被建模为一个轨迹生成任务,因此,要想生成高质量的轨迹,需要更加灵活的轨迹建模策略。同时,博弈场景涉及自车与周围环境的复杂时空交互关系。例如,当车辆需要在密集车流中变道时,模型必须同时关注当前车道及目标车道中前后方车辆的行为。这要求模型具备高效且自适应的特征整合与处理能力,能够快速识别并聚焦关键交通参与者的动作与意图。最后,为了能够在与周围交通参与者的博弈过程中作出准确的反应,模型在轨迹生成阶段需要充分考虑周围交通参与者的行为对自车当前和未来状态的影响。
基于此,本文提出了Flow Planner框架。它利用Flow Matching生成式模型强大而高效的多模态数据建模能力,从轨迹表征、模型架构到生成机制三方面协同改进,全面提升规划模型在复杂博弈场景下的理解与反应能力。接下来,我们将分别就这三点关键创新展开介绍。
技术细节
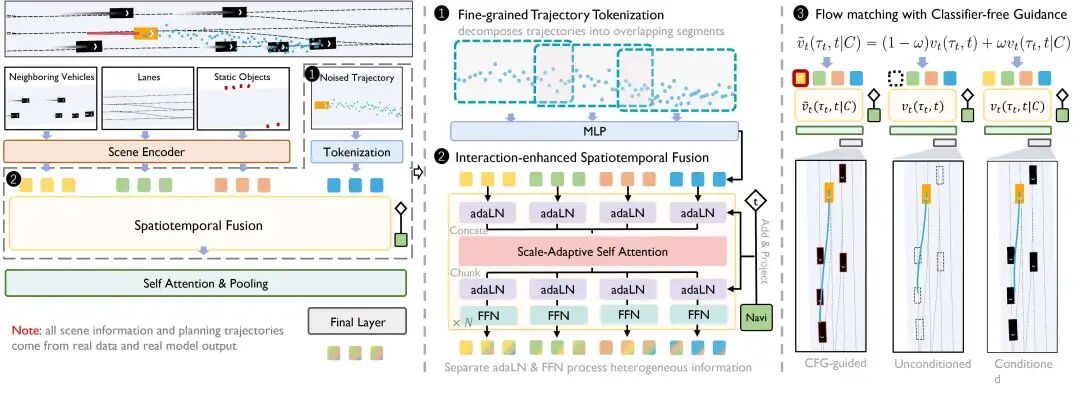
细粒度轨迹分段表示(Fine-grained Trajectory Tokenization)
传统方法往往用一个整体token表示完整轨迹,导致时序信息被过度压缩;Flow Planner将轨迹划分为多个重叠的片段,并为每个片段建立局部token表示,使模型能够:
保持运动学连续性;
精确捕捉不同时间段的交互模式;
提升多模态驾驶行为的可表达性。
这种局部建模+全局拼接的策略兼顾了表达力与平滑性,有效改善了规划轨迹的连贯性与多样性;配合下游的交互时空增强融合机制能够更加全面高效地捕捉到场景中的关键信息,提升规划模型对场景的理解能力。
博弈增强时空融合机制(Interaction-Enhanced Spatiotemporal Fusion)
自动驾驶场景中的博弈通常涉及到自车与多个不同的交通参与者在不同的时空位置进行交互。基于此,Flow Planner设计了基于尺度自适应注意力的特征融合模块,该模块:
在统一的特征空间中同时处理车道、自车与周车轨迹信息;
基于具体场景动态调整每个token的感受野大小,使模型能自动聚焦于关键交互对象;
通过独立的Adaptive LayerNorm与FFN模块,优化异构信息融合,避免不同模态特征互相干扰。
这使得模型能够同步融合处理自车轨迹特征、道路信息和周车、行人信息等异构特征,在保留各模态原有特征结构的同时,实现未来轨迹时序信息与周围环境空间信息的高效融合;帮助模型在复杂交通场景中高效捕捉空间交互依赖与时序一致性,实现类人化的博弈场景理解。
基于无分类器引导(Classifier-free Guidance)的周车增强轨迹生成
流匹配生成式模型的无分类器引导(Classifier-free Guidance)生成策略能够在推理时(inference-time)灵活地对模型采样的分布进行调整。利用这一机制,Flow Planner能够通过调整周车信息、道路信息等生成条件在模型采样的分布中的权重,放大其对轨迹规划与生成的影响,引导模型生成超越数据的驾驶行为与策略。同时,推理时可调的权重能够帮助模型平衡保守与激进的策略,在交互密集场景中生成更加自然、可控的驾驶行为,提升多模态驾驶行为生成能力。
实验结果
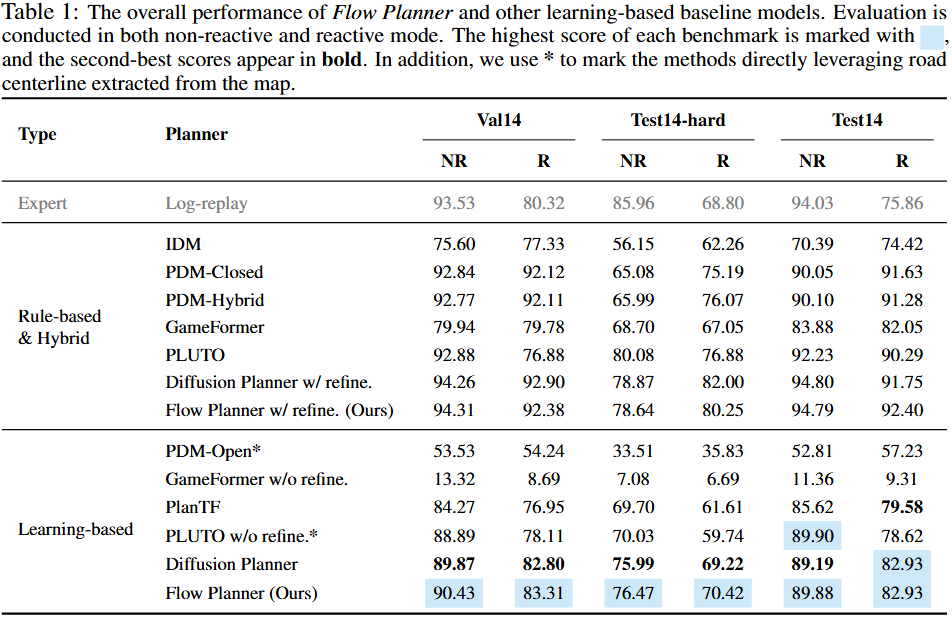
nuPlan 闭环仿真结果
Flow Planner在大规模真实世界规划基准 nuPlan 上实现了学习型方法的SOTA性能,在Val14基准上首次突破90分大关,且不依赖任何规则先验或后处理模块;在引入同样的基于规则的后处理模块后,Flow Planner的表现与最优的混合式方法相当甚至更优。
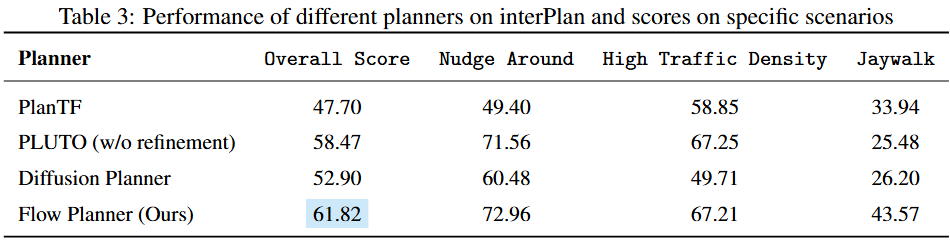
interPlan 高交互基准结果
在全新提出的interPlan高交互场景测试集中,Flow Planner在多种复杂情境下均显著优于Diffusion Planner及其他基线方法,整体性能提升8.9分;在“高密度交通”“行人横穿”等极端交互情境下展现出卓越的反应策略,并在部分分布外(Out-of-distribution)场景中展现出出色的泛化能力。
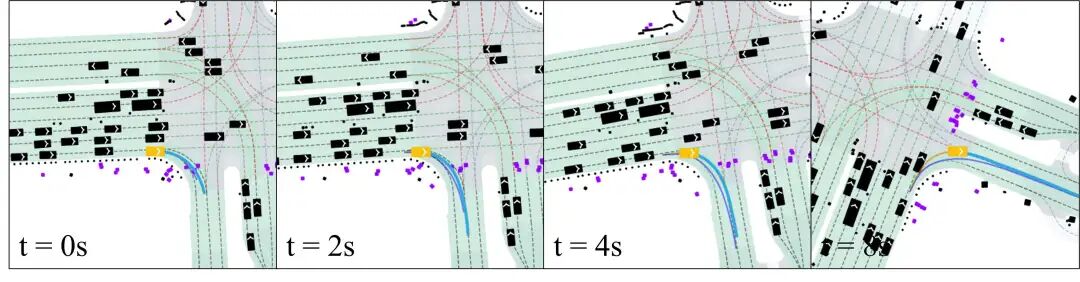
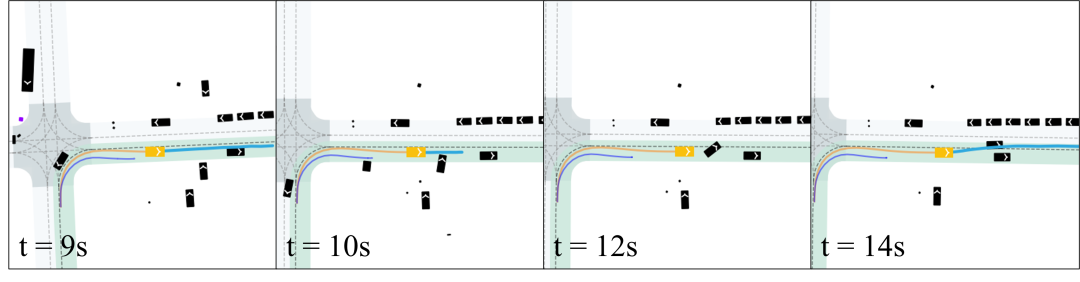
闭环可视化
Flow Planner在nuPlan的闭环测试中展现出充分的环境理解能力,能够在与周车、行人的复杂博弈场景中展现出灵活的轨迹规划与生成能力:无论是路口人行横道,还是路边他车无保护驶出,Flow Planner都能够准确判断其他交通参与者的行为意图,并作出快速精准的反应。
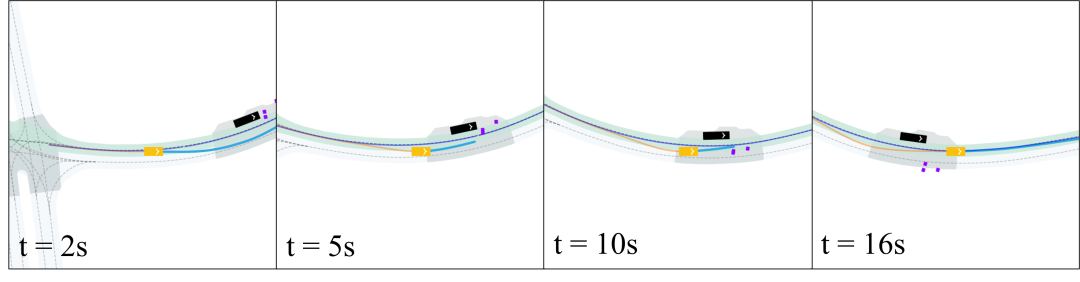
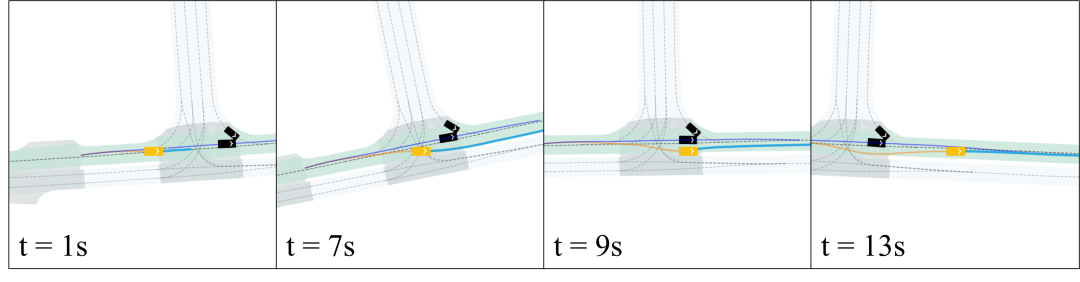
同时,我们在针对于博弈行为设计的interPlan上进一步测试了模型的能力。面对前车遮挡形成的视角盲区横穿行人,Flow Planner能够及时刹停让行;对于在训练数据中从未出现过的“前车撞车”场景,Flow Planner能够对路况做出准确判断,并采取绕行策略安全通行。
总结
本文提出的Flow Planner通过在数轨迹表征、模型架构与生成机制上的三重创新,显著提升了自动驾驶系统在复杂交通交互中的决策表现。该方法:
通过细粒度轨迹分段实现更精确的行为建模;
通过交互增强时空融合机制提升场景理解与响应能力;
结合Flow Matching + Classifier-Free Guidance实现高效且灵活的多模态生成。
Flow Planner在nuPlan与interPlan两个闭环基准上均取得SOTA级表现,展示了其在复杂交互建模与多场景适应性方面的强大潜力。
自动驾驶之心
论文辅导来啦

自驾交流群来啦!
自动驾驶之心创建了近百个技术交流群,涉及大模型、VLA、端到端、数据闭环、自动标注、BEV、Occupancy、多模态融合感知、传感器标定、3DGS、世界模型、在线地图、轨迹预测、规划控制等方向!欢迎添加小助理微信邀请进群。

知识星球交流社区
近4000人的交流社区,近300+自动驾驶公司与科研结构加入!涉及30+自动驾驶技术栈学习路线,从0到一带你入门自动驾驶感知(大模型、端到端自动驾驶、世界模型、仿真闭环、3D检测、车道线、BEV感知、Occupancy、多传感器融合、多传感器标定、目标跟踪)、自动驾驶定位建图(SLAM、高精地图、局部在线地图)、自动驾驶规划控制/轨迹预测等领域技术方案、大模型,更有行业动态和岗位发布!欢迎加入。

独家专业课程
端到端自动驾驶、大模型、VLA、仿真测试、自动驾驶C++、BEV感知、BEV模型部署、BEV目标跟踪、毫米波雷达视觉融合、多传感器标定、多传感器融合、多模态3D目标检测、车道线检测、轨迹预测、在线高精地图、世界模型、点云3D目标检测、目标跟踪、Occupancy、CUDA与TensorRT模型部署、大模型与自动驾驶、NeRF、语义分割、自动驾驶仿真、传感器部署、决策规划、轨迹预测等多个方向学习视频
学习官网:www.zdjszx.com

















 884
884

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









