



点击下方卡片,关注“自动驾驶之心”公众号
研究背景与核心挑战
端到端自动驾驶模型的闭环仿真强化学习训练正受到广泛关注。相比仅依赖专家演示的模仿学习,闭环强化学习能让模型与环境互动,提升在多样场景中的鲁棒性和适应性。但现有方法面临两大核心挑战:
仿真环境真实性不足:游戏引擎仿真器缺乏传感器级真实感,而现实世界闭环训练成本高、风险大;基于场景重建的方法虽能构建逼真数字孪生,但受限于训练数据分布,仅能在记录的相机轨迹范围内生成高质量传感器数据,难以处理突发刹车等极端场景。
训练数据分布不均:现有数据多偏向简单直线运动,缺乏复杂轨迹和极端场景样本,导致模型泛化能力受限。
本文内容均出自『自动驾驶之心知识星球』,更多自动驾驶行业、技术和求职信息,欢迎扫码加入~

核心框架:ReconDreamer-RL的三层设计
该框架通过整合视频扩散先验与场景重建,构建了包含三个核心组件的强化学习增强方案,分两阶段优化自动驾驶策略:模仿学习阶段通过行为克隆初始化规划,强化学习阶段通过闭环试错优化策略。
1. ReconSimulator:高逼真度仿真环境
作为强化学习的交互基础,其核心是结合外观建模与物理建模,缩小sim2real差距:
外观建模:先通过3D高斯 splatting(3DGS)重建驾驶场景并渲染新轨迹,再用DriveRestorer修正渲染视频中的伪影,迭代优化重建模型以支持多视角高质量渲染(流程见figure 2)。其中,DriveRestorer基于视频扩散模型微调,扩散损失公式为:
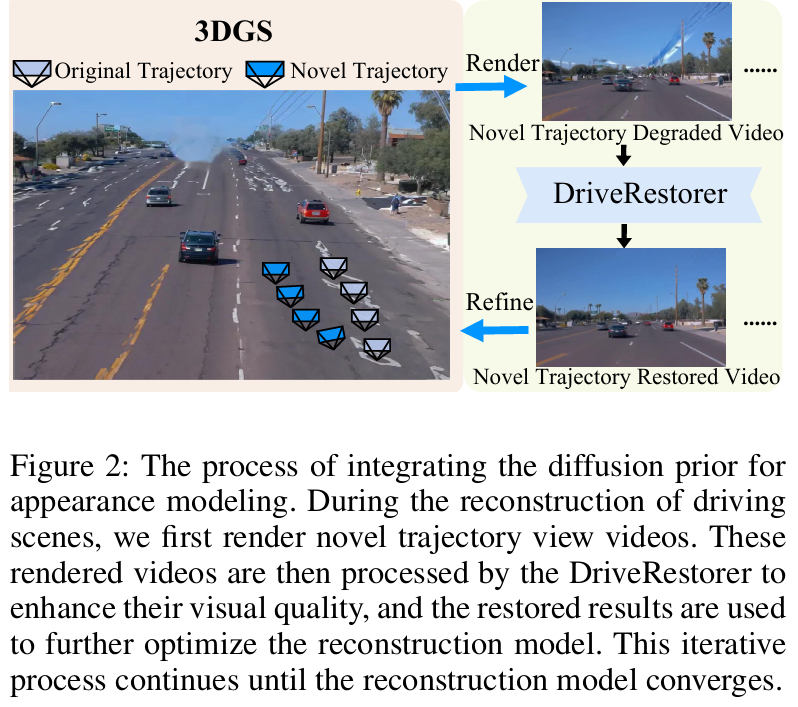
式中, 为时间步 的随机噪声, 为去噪网络, 为带噪 latent 变量, 包含退化视频 、3D边界框和高清地图等控制条件。
物理建模:采用运动学自行车模型确保车辆轨迹的物理可行性。车辆在世界坐标系中的位姿 ( 为旋转矩阵, 为位置)通过线速度 和转向角 更新,位置和方向更新公式分别为:
其中 为 导出的前进方向向量, ( 为轴距), 为绕z轴的旋转矩阵。
2. Dynamic Adversary Agent(DAA):极端场景生成器
为解决训练中极端场景缺失问题,DAA通过控制周围车辆轨迹自动生成切入、急刹等复杂交互场景(如figure 3、figure 4):

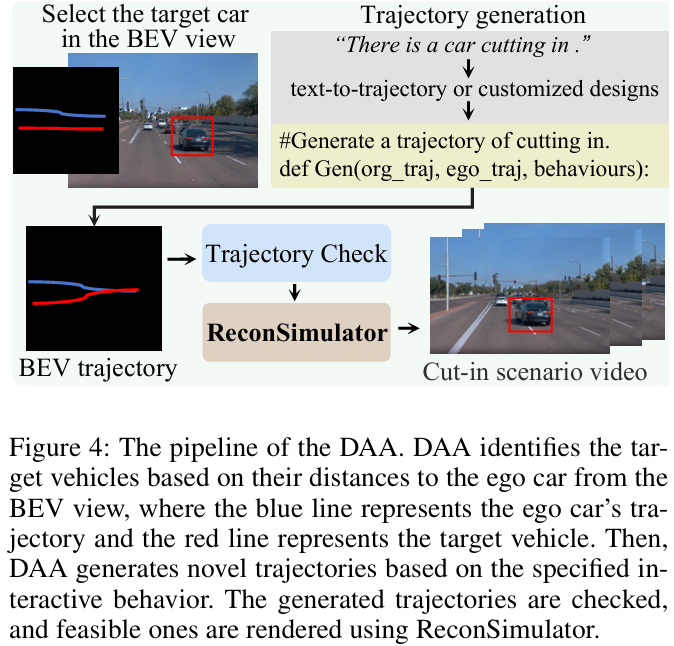
从BEV中根据与自车的距离筛选目标车辆,基于自车轨迹 和预设交互行为 ,通过函数 (如text-to-trajectory方法)生成新轨迹 。
生成的轨迹需通过可行性检查:确保在可行驶区域内、与其他车辆保持最小距离( ),且符合运动学模型约束。
同时用于模仿学习和强化学习阶段:前者生成离线避撞轨迹数据,后者动态调整目标车辆速度等参数增加训练难度。
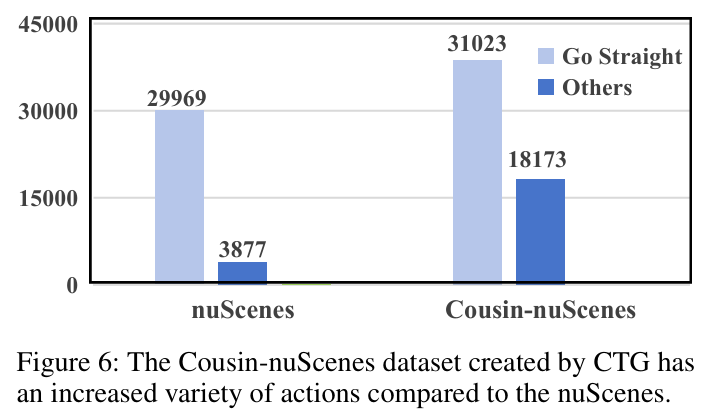
3. Cousin Trajectory Generator(CTG):轨迹多样性增强器
针对训练数据偏向直线运动的问题,CTG通过轨迹扩展和插值生成多样化轨迹,构建Cousin-nuScenes数据集(如figure 5、figure 6):
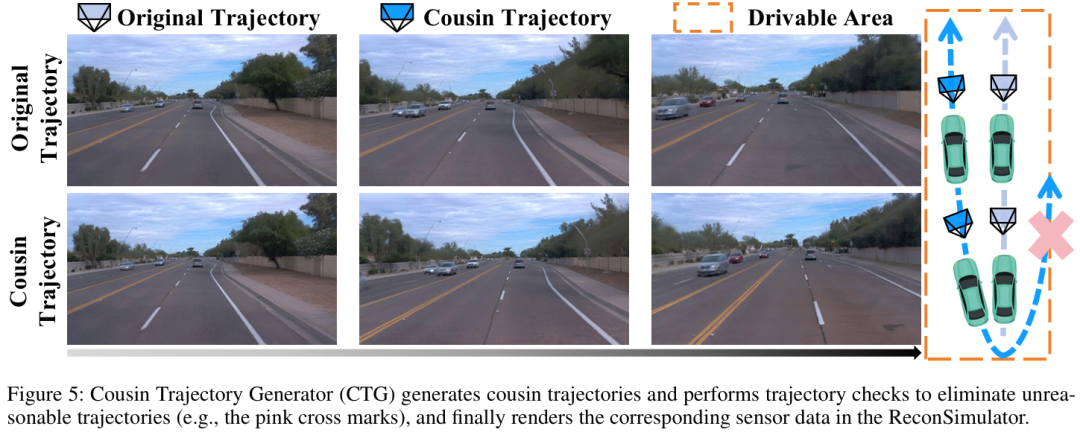
轨迹扩展:生成车道变更、急转等新轨迹,检查其物理可行性和避撞性。
轨迹插值:对专家轨迹 在时间步 与 间线性插值,插值点 为:
其中 ( , 为插值点数),同时调整周围车辆位置以保持真实交互关系。
实验验证:性能与优势
实验在基于nuScenes和Waymo数据集重建的3DGS环境中展开,对比了VAD、GenAD、RAD等基线方法,验证了该框架的有效性。
1. 整体性能提升
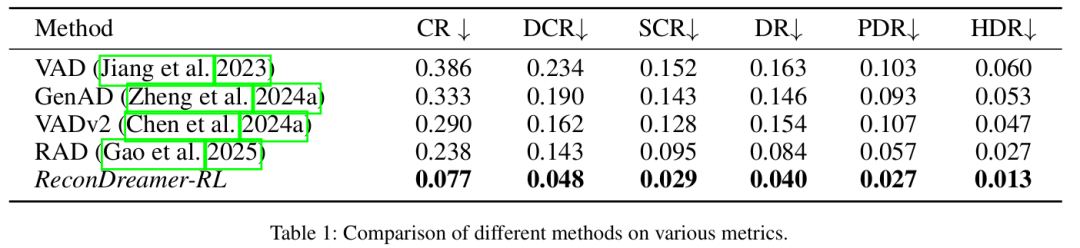
table 1显示,相比模仿学习方法(如VAD的碰撞率0.386)和强化学习方法RAD(0.238),该框架的碰撞率降至0.077,降低约5倍;位置和方向偏差总和(DR)也从RAD的0.084降至0.040,轨迹贴合度显著提升。
2. 极端场景表现
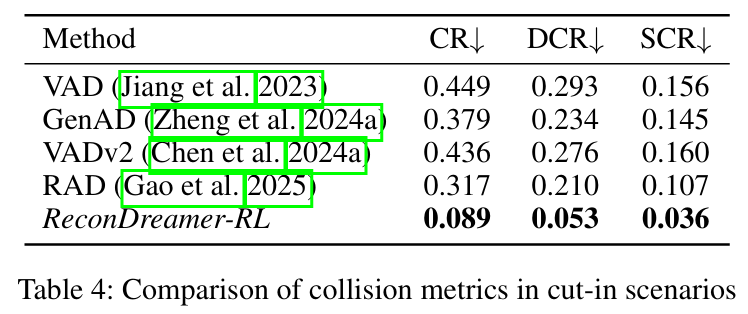
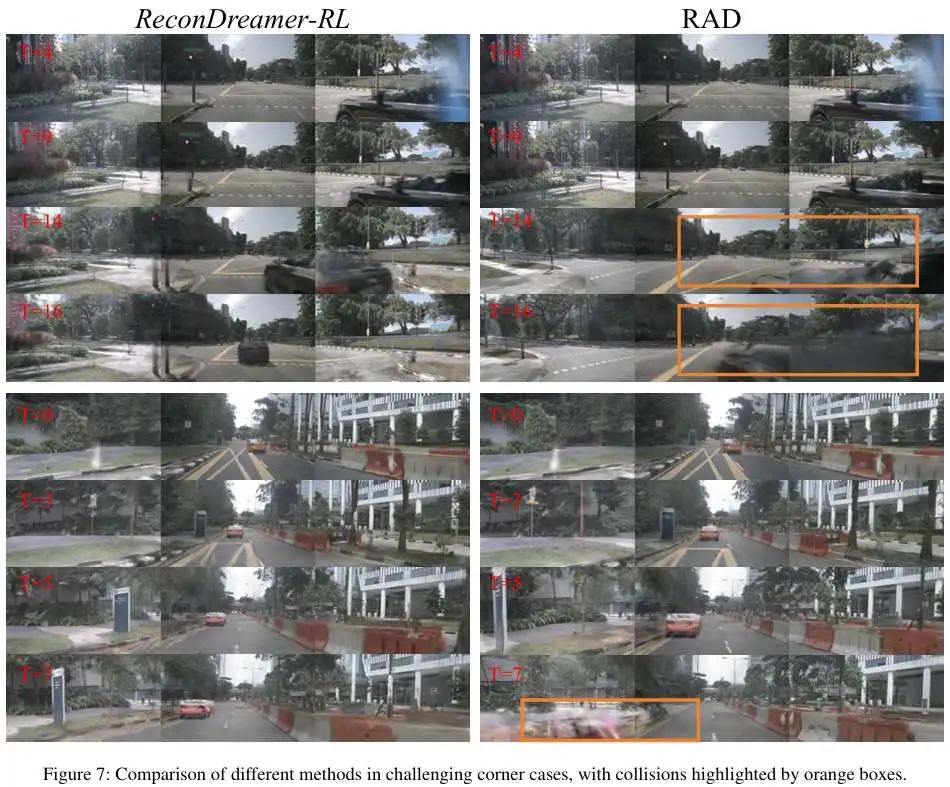
在切入场景中(table 4),模仿学习方法动态碰撞率极高(如VAD为0.293),RAD虽有改进(0.210),但该框架将其降至0.053,碰撞率较模仿学习提升404.5%。定性结果(figure 7)显示,面对右侧车辆快速切入及切入后急刹场景,该框架能成功避撞,而RAD因反应不足或操控不当导致碰撞。
3. 组件有效性
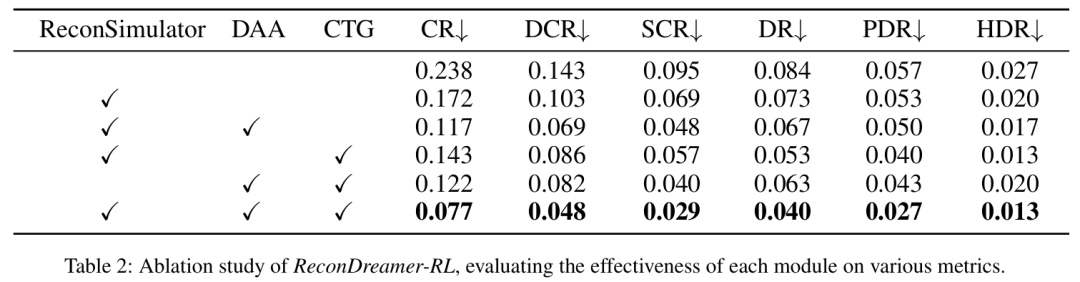
消融实验(table 2)表明:
移除ReconSimulator后,碰撞率从0.077升至0.238,验证了逼真仿真环境的必要性;
DAA将碰撞率从0.172降至0.117,证明极端场景生成的价值;
CTG通过优化数据分布,将偏差率从0.073降至0.053。
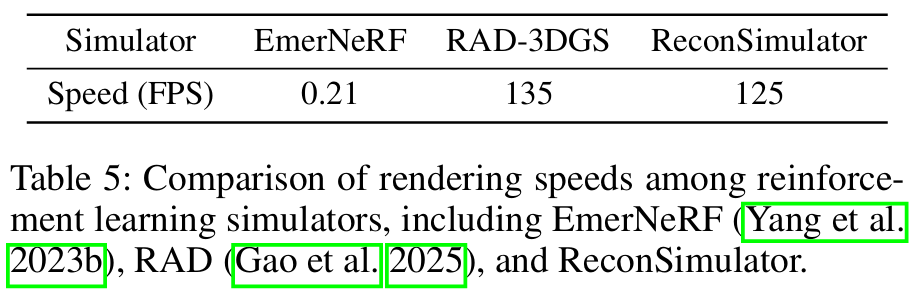
4. 渲染效率
table 5显示,ReconSimulator的渲染速度达125 FPS,远超EmerNeRF的0.21 FPS,满足强化学习实时交互需求。
参考
[1]ReconDreamer-RL: Enhancing Reinforcement Learning via Diffusion-based Scene Reconstruction
自动驾驶之心
论文辅导来啦

自驾交流群来啦!
自动驾驶之心创建了近百个技术交流群,涉及大模型、VLA、端到端、数据闭环、自动标注、BEV、Occupancy、多模态融合感知、传感器标定、3DGS、世界模型、在线地图、轨迹预测、规划控制等方向!欢迎添加小助理微信邀请进群。

知识星球交流社区
近4000人的交流社区,近300+自动驾驶公司与科研结构加入!涉及30+自动驾驶技术栈学习路线,从0到一带你入门自动驾驶感知(大模型、端到端自动驾驶、世界模型、仿真闭环、3D检测、车道线、BEV感知、Occupancy、多传感器融合、多传感器标定、目标跟踪)、自动驾驶定位建图(SLAM、高精地图、局部在线地图)、自动驾驶规划控制/轨迹预测等领域技术方案、大模型,更有行业动态和岗位发布!欢迎加入。

独家专业课程
端到端自动驾驶、大模型、VLA、仿真测试、自动驾驶C++、BEV感知、BEV模型部署、BEV目标跟踪、毫米波雷达视觉融合、多传感器标定、多传感器融合、多模态3D目标检测、车道线检测、轨迹预测、在线高精地图、世界模型、点云3D目标检测、目标跟踪、Occupancy、CUDA与TensorRT模型部署、大模型与自动驾驶、NeRF、语义分割、自动驾驶仿真、传感器部署、决策规划、轨迹预测等多个方向学习视频
学习官网:www.zdjszx.com

















 6602
6602

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









