 ICCV 2025人机交互研讨会与挑战赛征稿
ICCV 2025人机交互研讨会与挑战赛征稿




点击下方卡片,关注“自动驾驶之心”公众号
ICCV 2025 “人机场景交互与协作”研讨会&挑战赛将于2025年10月20日下午(UTC-10)在夏威夷檀香山举行。

-------------------------研讨会简介--------------------------
智能机器人正以前所未有的速度融入我们的生活场景——从家庭、医院到工厂和学校,它们将逐渐成为人类的伙伴与助手。如何让这些具身智能体更安全、更智能、更自然地与人类协作,并适应不断变化的环境?这正是本次研讨会希望与您共同探索的核心议题。
本次研讨会将聚焦以下前沿方向,诚邀您的参与:
✨ 知识迁移创新:从人与人以及人与场景的交互和协作中转移知识,为人形和其他具身智能体的开发提供信息(例如,通过重定向)。
✨ 视觉表征突破:探索不同的方法来提取视觉表征信息,以捕获与人机协作相关的对象属性、动态和可供性。
✨ 意图预测革命:研究对人类意图进行建模和预测的方法,使机器人能够预测行动并安全做出反应。
✨ 场景融合实践:将机器人集成到交互式环境中,以促进无缝且有效的团队合作。
✨ 评估体系构建:建立有意义的基准和指标来衡量人机场景交互和协作的进步。
研讨会主页链接:https://human-robot-scene.github.io/
🌐 Invited Speakers
论文征稿
本次研讨会投稿论文内容包含但不限于:
视觉表征(Visual Representations):开发提取视觉表征的方法,以捕获与人机协作相关的对象属性、动力学特性和功能语义。
场景理解(Scene Understanding):增强理解和解释动态环境的能力,包括对物体、动作和交互的识别。
动作捕捉和人类交互建模(Motion Capture and Human Interaction Modeling):先进的人类运动和交互捕捉和建模技术。
知识迁移(Knowledge Transfer):利用人与人和人与场景交互的知识,为人形和其他具身智能体的开发提供思路,例如通过运动重定向技术。
意图建模(Intention Modeling):研究建模和预测人类意图的方法,使机器人能够预测行动并安全做出反应。
人机协作(Human-Robot Collaboration):探索将机器人集成到交互环境中的策略,以促进无缝且有效的团队合作。
基准测试和指标(Benchmarking and Metrics):建立有意义的基准和指标来评估人机场景交互和协作的进步。
我们欢迎提交涉及人机场景交互和协作主题的长论文(最多8页,不含参考文献)和短论文(最多4页,不含参考文献)。投稿须遵循ICCV 2025格式规范。录用论文将以海报形式展示,部分优秀论文将获选进行口头报告。有意投稿者请于8月15日前通过投稿系统提交。
如果您对提交的内容是否符合研讨会的重点有任何疑问,请随时与gujy1@shanghaitech.edu.cn联系。
格式规范:https://iccv.thecvf.com/Conferences/2025/AuthorGuidelines
投稿系统:https://openreview.net/group?id=thecvf.com/ICCV/2025/Workshop/HRSIC
论文提交截止时间:2025.08.15
论文录用情况通知时间:2025.08.29
最终版本提交:2025.09.05
研讨会时间:2025.10.20
------------------------------挑战赛----------------------------
为激励人形机器人与场景交互的进步,我们还将与研讨会同时举办“多地形人形运动挑战赛”和“人形-物体交互挑战赛”。
多地形人形运动挑战赛
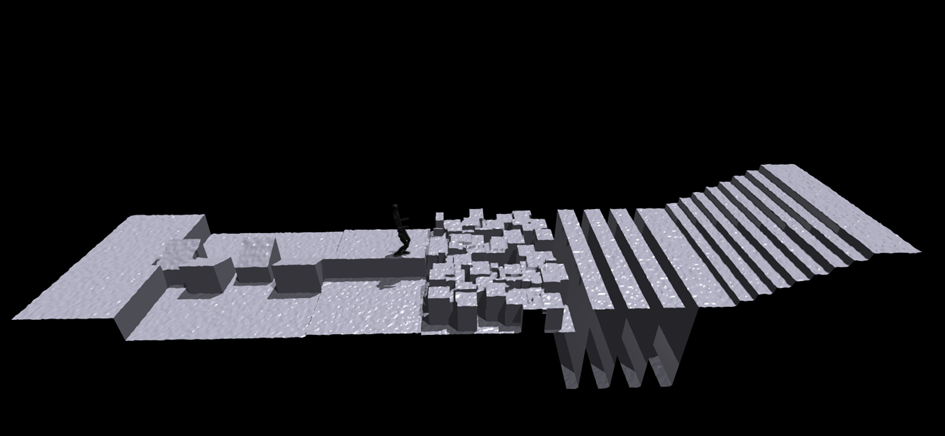
本次竞赛聚焦人形机器人运动控制算法的突破性创新,致力于解决复杂非结构化地形下的自主导航难题——这一核心能力将直接推动家庭服务、灾难救援及野外勘探等实际场景的机器人应用。
奖项:
✓ 一等奖:1000 美元
✓ 二等奖:500 美元
✓ 三等奖:300 美元
注册截止时间:2025.09.14
提交截止时间:2025.09.21
获奖公布时间:2025.09.23
挑战赛网站链接:https://human-robot-scene.github.io/Terrain-Challenge/
人形-物体交互挑战赛
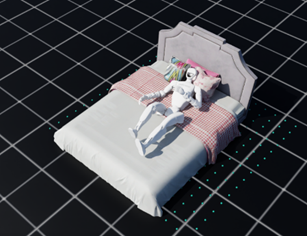
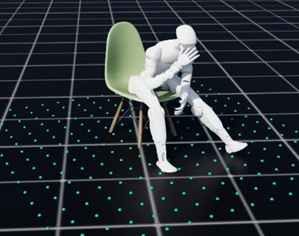

人形-物体交互挑战赛要求参赛者开发能够感知、推理并与日常物体进行物理交互的模拟人形智能体,使其在逼真的室内场景中完成复杂任务。与单纯的运动控制不同,参赛方案需整合接触密集型操作、交互式感知和语义推理能力,以执行诸如躺卧上床、推移冰箱、抓取盒子、坐椅子等需要多模态协调的高级交互任务。
奖项:
✓ 一等奖:1000 美元
✓ 二等奖:500 美元
✓ 三等奖:300 美元
注册截止时间:2025.09.14
提交截止时间:2025.09.21
获奖公布时间:2025.09.23
挑战赛网站链接:https://hyangwork01.github.io/Humanoid-Object-Interaction-Bench/
-------------------------组织委员会--------------------------


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









