




点击下方卡片,关注“自动驾驶之心”公众号
今天自动驾驶之心为大家分享南开大学团队ICCV'25中稿的最新工作!AD-GS:自监督自动驾驶高质量闭环仿真,PSNR暴涨2个点!如果您有相关工作需要分享,请在文末联系我们!
自动驾驶课程学习与技术交流群事宜,也欢迎添加小助理微信AIDriver004做进一步咨询
>>自动驾驶前沿信息获取→自动驾驶之心知识星球
论文作者 | Jiawei Xu等
编辑 | 自动驾驶之心
背景与挑战
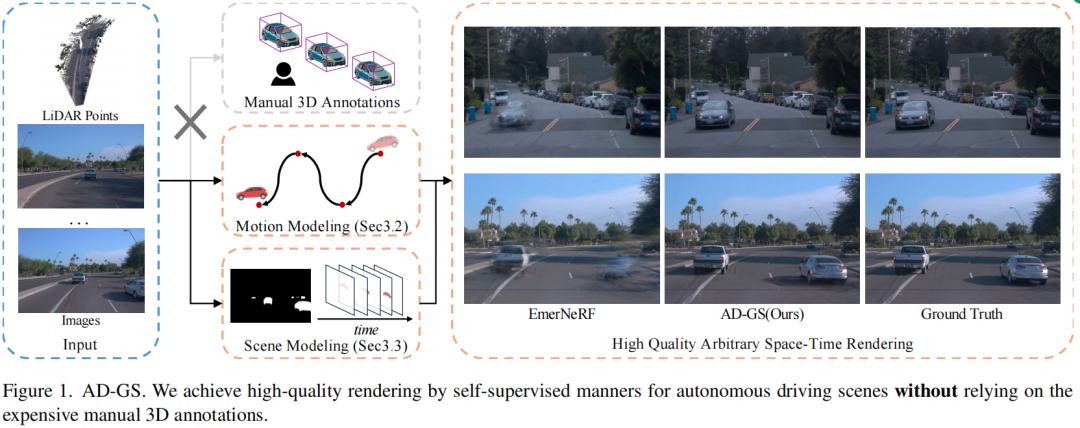
自动驾驶场景的动态建模与渲染对仿真系统至关重要,但现有方法存在明显局限:依赖人工3D标注的方法成本高昂,难以大规模应用;自监督方法则面临动态物体运动捕捉不准确、场景分解粗糙导致渲染伪影等问题。
动态城市驾驶场景的高质量渲染需要精准捕捉车辆、行人等动态物体的运动,同时实现场景的有效分解。传统自监督方法中,神经网络建模运动计算量大且局部细节捕捉不足,仅用三角函数等预定义函数虽提升速度却难以处理局部运动;场景分解依赖复杂语义标注,噪声干扰严重,导致重建质量下降。
核心创新
AD-GS提出一种全新自监督框架,基于高斯splatting实现自动驾驶场景的高质量自由视角渲染,核心突破体现在三方面:
运动建模:融合局部感知的B-Spline曲线与全局感知的三角函数,实现灵活且精准的动态物体运动建模;
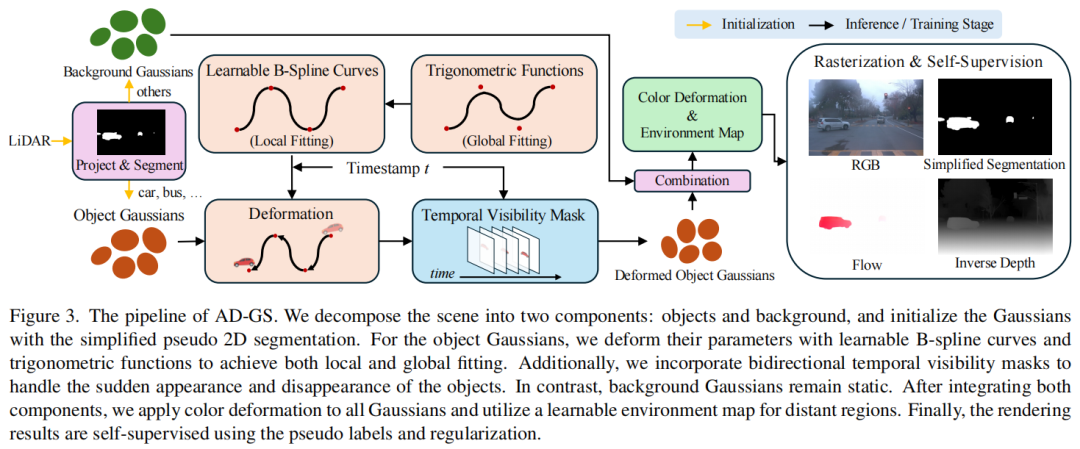
场景分解:通过简化的伪2D分割将场景自动分为物体与背景,物体用动态高斯与双向时间可见性掩码表示,提升噪声鲁棒性;
正则化设计:引入可见性与物理刚性正则化,避免模型陷入混沌状态,增强稳定性。
整体框架通过自监督方式实现高质量时空渲染,无需昂贵手动3D标注(Figure 1)。
核心方法细节
整体框架
基于高斯splatting,将场景表示为大量3D高斯,每个高斯由位置 、缩放 、旋转 、不透明度 和颜色 (球面谐波系数)定义。框架将高斯分为物体高斯 与背景高斯 :
物体高斯:通过B-Spline曲线与三角函数实现位置和旋转的时间变形,结合双向时间可见性掩码处理突然出现/消失;
背景高斯:保持静止,不随时间变形;
所有高斯的颜色通过三角函数进行时间变形,远处天空等区域用可学习球面环境贴图表示。
整体流程如Figure 3所示,通过自监督与正则化训练,实现动态场景的精准重建。
B-Spline运动曲线:全局与局部运动拟合
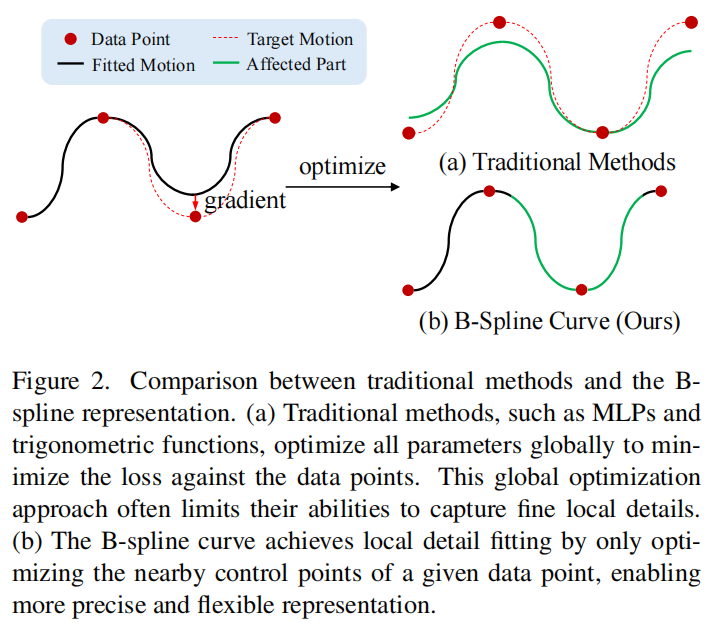
传统方法(如MLP、三角函数)通过全局优化所有参数拟合运动,难以捕捉局部细节;B-Spline曲线仅优化数据点附近的控制点,实现更精准的局部拟合(Figure 2)。
可学习B-Spline曲线
给定 个控制点 , 阶B-Spline曲线定义为:
其中 为基函数,仅在特定区间非零,通过矩阵形式(Equation 5)高效计算,控制点为可学习参数。
为结合全局拟合能力,运动模型融入三角函数:
实现局部细节(B-Spline)与全局趋势(三角函数)的协同建模。
可学习B-Spline四元数曲线
标准B-Spline难以处理单位四元数(旋转参数)的插值,因此采用B-Spline四元数曲线:
其中 , 由基函数累加得到,确保旋转参数的平滑变形。
物体感知Splatting与时间掩码
基于简化2D分割的场景分解
将场景分割简化为“物体”与“背景”两类(运动可能性高的类别为物体,其余为背景),基于SAM生成的伪2D分割结果初始化高斯分类。通过渲染物体掩码并结合二元交叉熵损失 优化,确保物体与背景高斯的正确分布:
其中 为高斯不透明度, 为指示函数。
双向时间可见性掩码
针对物体突然出现/消失,引入时间掩码调整物体高斯的不透明度:
其中 为LiDAR点的采集时间戳(固定值), 为可学习参数。通过扩展正则化损失 防止掩码过窄( 为平均帧间隔)。
自监督与正则化
多源监督信号
光流监督:利用CoTracker3生成伪标签,通过投影3D位置与光流点的差异损失 约束运动轨迹;
逆深度监督:直接渲染逆深度图 ,结合DPTv2生成的伪标签与尺度偏移损失 优化;
天空监督:通过SAM生成天空掩码,用二元交叉熵损失 约束天空区域渲染。
刚性正则化
为保证物体高斯的变形一致性,引入正则化损失 ,约束邻近高斯(KNN选取)在位置、三角函数参数、时间掩码等方面的方差:
每10次迭代更新KNN结果以平衡效率与性能。
总损失函数
其中 和 为渲染图像与真值的损失, 为各损失权重。
实验验证
数据集与基线
在KITTI、Waymo、nuScenes三个数据集上评估,对比SUDS、EmerNeRF、PVG等自监督方法,以及4DGF、StreetGS等依赖标注的方法。
性能对比
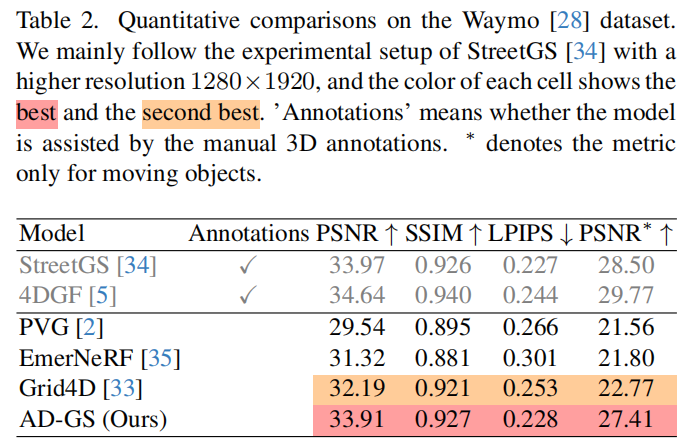
自监督方法:在所有数据集上,AD-GS的PSNR、SSIM均显著优于基线,LPIPS更低。例如KITTI-75%设置中,AD-GS的PSNR达29.16,远超PVG的27.13(Table 1);Waymo数据集上,物体区域PSNR∗达27.41,远超PVG的21.56(Table 2)。
与标注依赖方法对比:AD-GS在无标注情况下性能接近4DGF等方法,如Waymo上PSNR达33.91,接近StreetGS的33.97(Table 2)。
消融实验
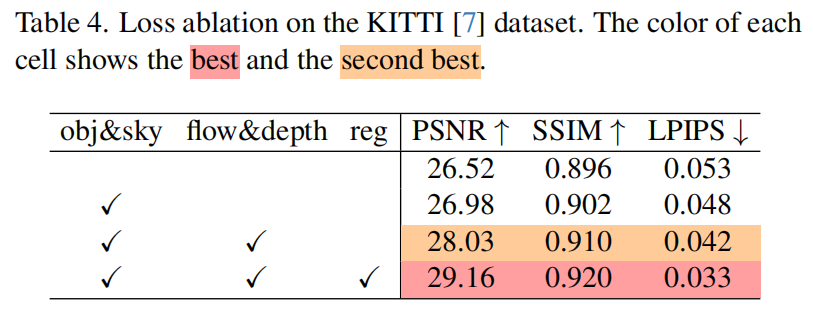
损失函数:逐步加入 、 、 后,PSNR从26.52提升至29.16,验证各监督项的有效性(Table 4);
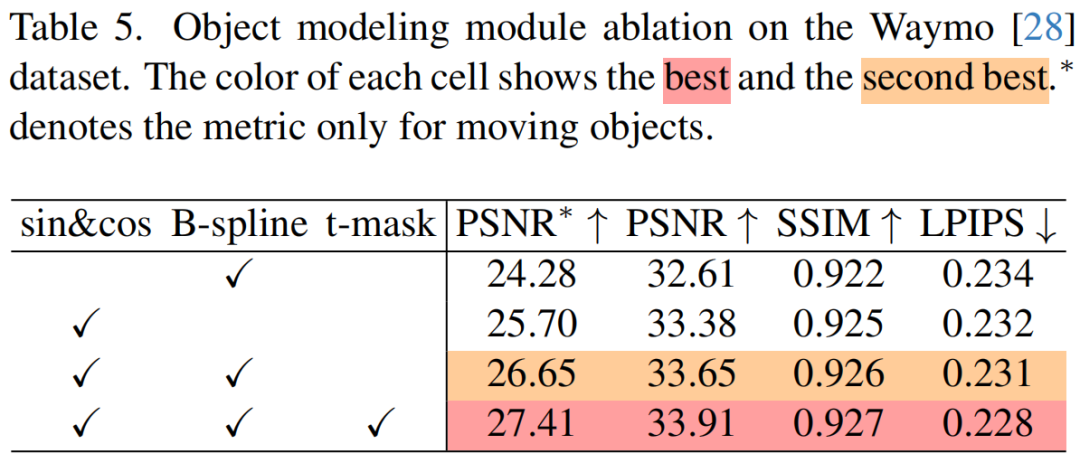
模块有效性:B-Spline曲线(局部拟合)与时间掩码(处理出现/消失)的加入,使Waymo数据集上物体PSNR∗从24.28提升至27.41(Table 5),Figure 8可见动态物体渲染质量显著提升。

结论与局限
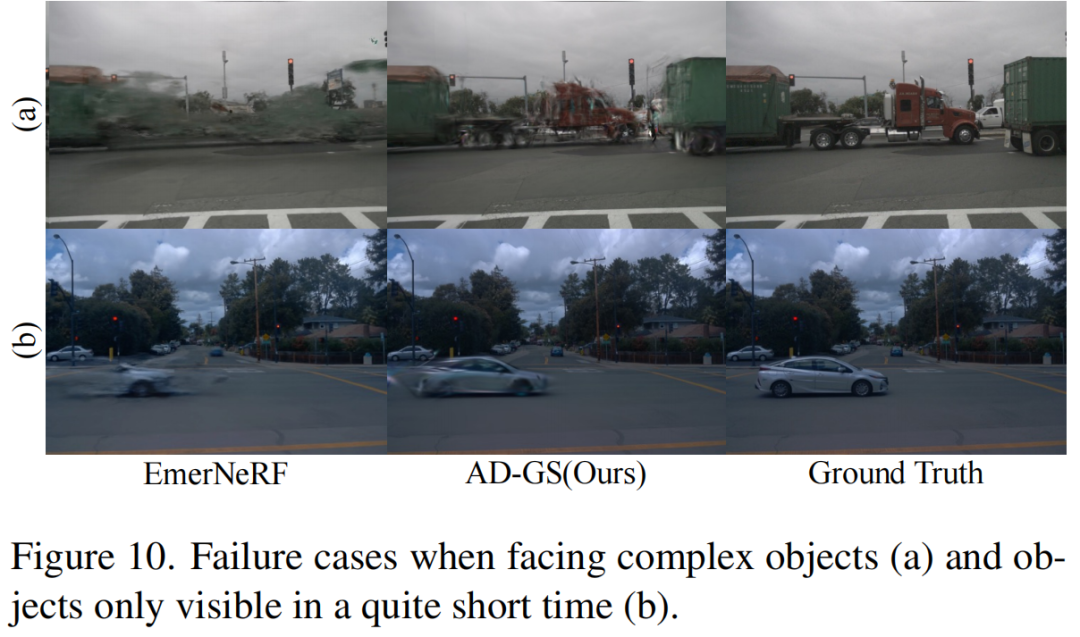
AD-GS通过B-Spline与三角函数的融合运动建模、简化场景分解、刚性正则化,实现了无标注情况下自动驾驶场景的高质量渲染,显著超越现有自监督方法,且性能接近标注依赖方法。但在复杂动态物体重建仍有挑战;物体可见时间过短(如仅10帧)时渲染质量下降;伪标签质量低会引入伪影(Figure 10)。
参考
[1]AD-GS: Object-Aware B-Spline Gaussian Splatting for Self-Supervised Autonomous Driving
自动驾驶之心
论文辅导来啦

知识星球交流社区
近4000人的交流社区,近300+自动驾驶公司与科研结构加入!涉及30+自动驾驶技术栈学习路线,从0到一带你入门自动驾驶感知(大模型、端到端自动驾驶、世界模型、仿真闭环、3D检测、车道线、BEV感知、Occupancy、多传感器融合、多传感器标定、目标跟踪)、自动驾驶定位建图(SLAM、高精地图、局部在线地图)、自动驾驶规划控制/轨迹预测等领域技术方案、大模型,更有行业动态和岗位发布!欢迎加入。

独家专业课程
端到端自动驾驶、大模型、VLA、仿真测试、自动驾驶C++、BEV感知、BEV模型部署、BEV目标跟踪、毫米波雷达视觉融合、多传感器标定、多传感器融合、多模态3D目标检测、车道线检测、轨迹预测、在线高精地图、世界模型、点云3D目标检测、目标跟踪、Occupancy、CUDA与TensorRT模型部署、大模型与自动驾驶、NeRF、语义分割、自动驾驶仿真、传感器部署、决策规划、轨迹预测等多个方向学习视频
学习官网:www.zdjszx.com

















 2984
2984

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









