



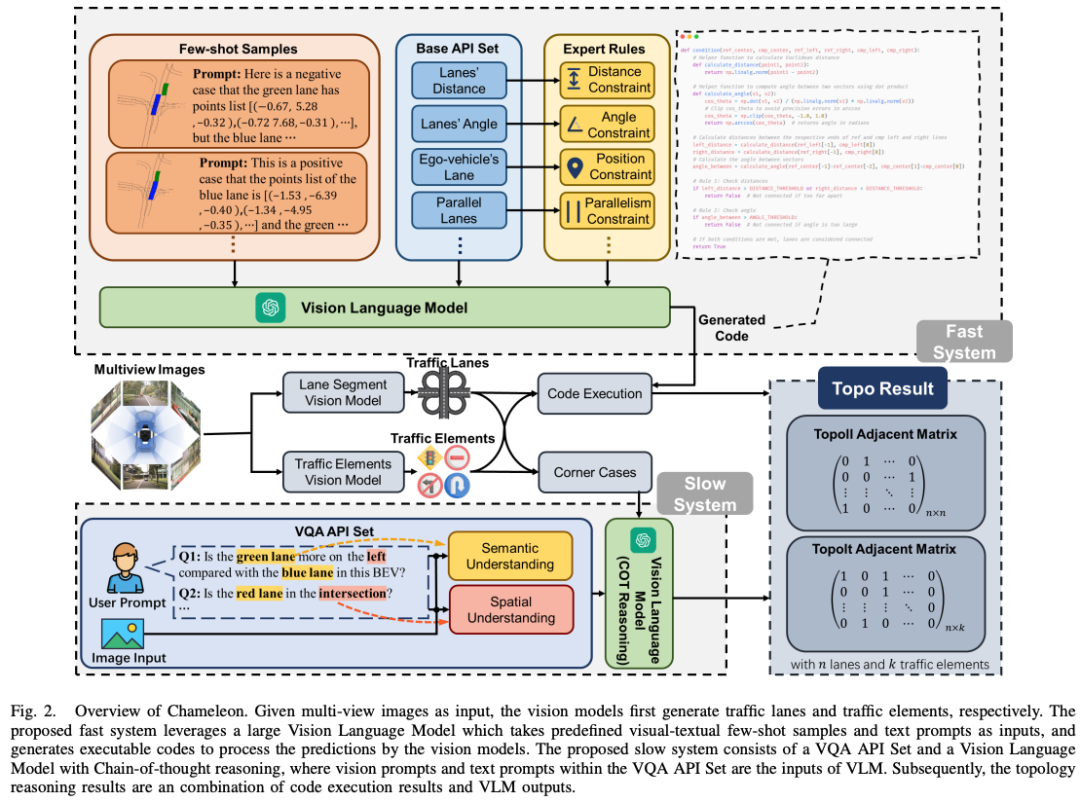
在自动驾驶技术中,车道拓扑提取是实现无地图导航的核心任务之一。它要求系统不仅能检测出车道和交通元素(如交通灯、标志),还要理解它们之间的复杂关系。例如,判断车辆是否可以左转进入某条车道,就需要综合考虑交通规则、车道布局和信号灯状态等多种因素。然而,现有的解决方案存在明显局限性。一方面,密集视觉提示方法虽然准确,但计算成本高昂,且在实时处理中效率低下,难以应用于实际场景。另一方面,神经符号推理方法虽然效率较高,但在处理复杂场景(如交叉路口)时,常常因为缺乏视觉信息而无法做出准确判断。
为了解决这一难题,清华大学与博世中央研究院RIX联合提出了一个创新的解决方案——Chameleon。它通过一种快慢系统交替的神经符号方法,成功平衡了效率与性能,为自动驾驶领域带来了新的突破。
论文链接:https://arxiv.org/pdf/2503.07485
开源地址:https://github.com/XR-Lee/neural-symbolic
今天自动驾驶之心很荣幸邀请到纽卡斯尔大学在读博士生李昕润和博世研究院科学家王磊臣,为大家分享这篇最新的工作Chameleon,今晚七点半锁定自动驾驶之心直播间~
>>直播和内容获取转到→自动驾驶之心知识星球

国内首个自动驾驶学习社区
『自动驾驶之心知识星球』近4000人的交流社区,已得到300+自动驾驶公司与科研机构的认可!涉及30+自动驾驶技术栈学习路线,从0到一带你入门自动驾驶感知(大模型、端到端自动驾驶、世界模型、仿真闭环、3D检测、语义分割、车道线、BEV感知、Occupancy、多传感器融合、多传感器标定、目标跟踪)、自动驾驶定位建图(SLAM、高精地图、局部在线地图)、自动驾驶规划控制/轨迹预测等领域技术方案,更有行业动态和岗位发布!欢迎扫描加入

【自动驾驶之心】技术交流群
自动驾驶之心是国内领先的技术交流平台,关注自动驾驶前沿技术与行业、职场成长等。我们成立了一系列的技术交流群,涉及:端到端自动驾驶、大模型、车道线检测、2D/3D目标跟踪、2D/3D目标检测、BEV感知、多模态感知、Occupancy、多传感器融合、transformer、点云处理、在线地图、SLAM、光流估计、深度估计、轨迹预测、高精地图、NeRF、Gaussian Splatting、规划控制、模型部署落地、自动驾驶仿真测试、产品经理、硬件配置、AI求职交流等多个方向!
备注:学校/公司+方向+昵称(快速入群方式)

点击下方卡片,关注“自动驾驶之心”公众号
ADAS巨卷干货,即可获取


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









