



作者 | 梦想成真 编辑 | 自动驾驶之心
原文链接:https://zhuanlan.zhihu.com/p/12081484294
点击下方卡片,关注“自动驾驶之心”公众号
戳我-> 领取自动驾驶近15个方向学习路线
本文只做学术分享,如有侵权,联系删文
前言
每一个网络都有下采样倍数,那么输入的图像尺寸按理说应该是他的整数倍,能保证刚好被整除。以qwen2vl(vision backbone 下采样 28 倍)为例,动态分辨率核心要考虑三个点
图像在resize的时候,既需要考虑图像尺寸是 28 的整数倍
也需要考虑尽可能的保证图像resize不失真,也就是保持宽高比。比如512x512的图像,如果resize 到了128x2048,那么图像就会严重失真。
其次就是训练的泛化性,推理的时候输入更小/大的图像(尤其视频帧),模型能不能外推。
一个冷知识:mac上显示和实际图像大小可能不一致,猜测这是因为mac显示的时候也做了动态分辨率的resize,保证显示效果。
实际测试发现,mac 上看详情,图像尺寸 1224x926,pil 读入的size是1232x924,size不一致。image save到本地后再看尺寸还是1224x926。
qwen2vl动态分辨率逻辑
qwen 对图像有三层处理逻辑:
# 第一步 resize
if do_resize:
resized_height, resized_width = smart_resize(
height,
width,
factor=self.patch_size * self.merge_size,
min_pixels=self.min_pixels,
max_pixels=self.max_pixels,
)
image = resize(
image, size=(resized_height, resized_width), resample=resample, input_data_format=input_data_format
)
# 第二步 rescale
if do_rescale:
image = self.rescale(image, scale=rescale_factor, input_data_format=input_data_format)
# 第三步 normalize
if do_normalize:
image = self.normalize(
image=image, mean=image_mean, std=image_std, input_data_format=input_data_format
)
# 第四步 堆叠...因为qwen2vl vit的后面有一个MLP做的pooling(x2),加上vit本身的降采样(x14),总共图像在 宽、高上会降采样2x14=28倍。
第一步 smart resize
smart resize 分为两步:
1、算宽高 28的整数倍最接近的数值
h_bar = round(height / factor) * factor
w_bar = round(width / factor) * factor2、统一放缩。这里有两个关键的参数min_pixels和max_pixels。这两个关键参数用来计量总的像素数,pixels = hxw。如果超过了max_pixels,那么就会统一resize到 min_pixels 和 max_pixels之间。
if h_bar * w_bar > max_pixels:
beta = math.sqrt((height * width) / max_pixels)
h_bar = math.floor(height / beta / factor) * factor
w_bar = math.floor(width / beta / factor) * factor第二步 rescale
这一步有一个关键的参数,rescale_factor。qwen2vl 默认取 0.00392156862745098(其实就是1/255),得到的结果就是 rescale_factor 逐元素相乘 image。
image = self.rescale(image, scale=rescale_factor, input_data_format=input_data_format)第三步 normalize
很传统的按照mean,std归一化。
第四步 堆叠 凑时间步
因为qwen的vit最开始的embed方式是一个2x3x3的conv,所以需要把单图copy成2份,比如对于(1, 3, 924, 1232) 的图像就变成了(2, 3, 924, 1232)。
patches = np.tile(patches, (self.temporal_patch_size, 1, 1, 1))训练泛化性讨论
根据qwen2vl提供的7B叙述,min_pixel是3136,max_pixel是12845056,如何h和w一样大的话,大概可以兼容从 56* 56 到 3584x3584的图像输入。但是对于video的每帧,考虑到多帧情况,最大是16384。并且由于scale到了min_pixels 和 max_pixels之间,所以泛化性不是问题。实际训练中也发现了,调整小max_pixel,对性能影响不大(不过这个也看啥任务)。
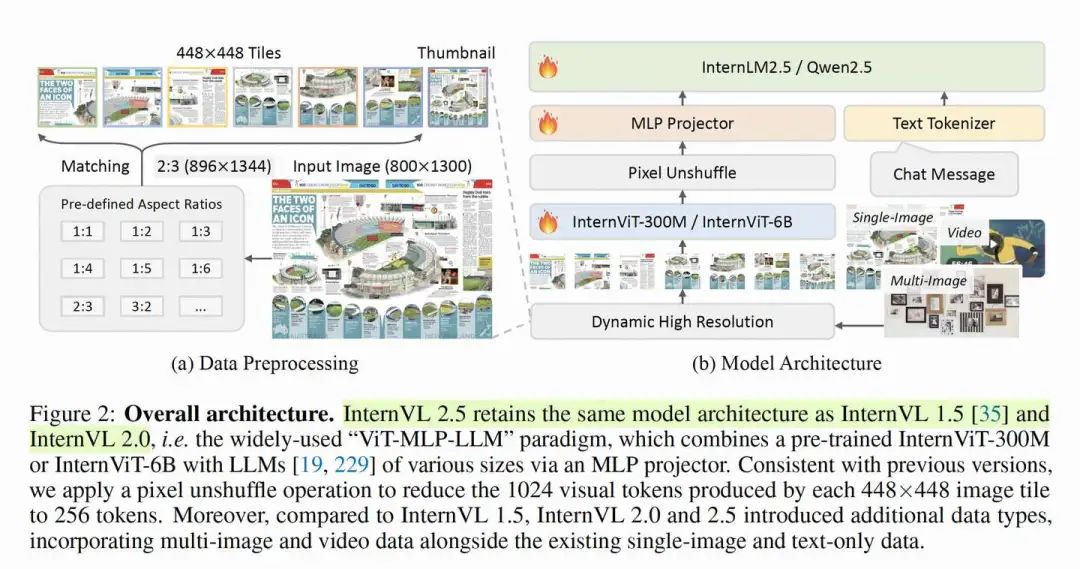
internvl2动态分辨率逻辑
总的来说,internvl的逻辑更加复杂一些。以最新的internvl2.5来看,internvl的处理逻辑基本没有变化。相比于qwen的动态分辨率,internvl2的逻辑更加高清一些,所以名字起的也很好,叫dynamic high resolution。
代码如下,最重要的就是dynamic_preprocess这个函数。
def load_image(image_file, input_size=448, max_num=12):
image = Image.open(image_file).convert('RGB')
# 第一步 transform
transform = build_transform(input_size=input_size)
# 第二步 动态分辨率
images = dynamic_preprocess(image, image_size=input_size, use_thumbnail=True, max_num=max_num)
pixel_values = [transform(image) for image in images]
# 第三步 堆叠
pixel_values = torch.stack(pixel_values)
return pixel_values第一步 transform
常规操作,直接绕过
IMAGENET_MEAN = (0.485, 0.456, 0.406)
IMAGENET_STD = (0.229, 0.224, 0.225)
def build_transform(input_size):
MEAN, STD = IMAGENET_MEAN, IMAGENET_STD
transform = T.Compose([
T.Lambda(lambda img: img.convert('RGB') if img.mode != 'RGB' else img),
T.Resize((input_size, input_size), interpolation=InterpolationMode.BICUBIC),
T.ToTensor(),
T.Normalize(mean=MEAN, std=STD)
])
return transform第二步 dynamic_preprocess
dynamic_preprocess 的默认参数如下,image_size 448是因为internvl需要把图像拆分成patch,训练/测试都是448,use_thumbnail 是指用一个缩略的头图保持整体的全局信息,max_num表示一个patch的最大数目。
dynamic_preprocess(
image,
image_size=448,
use_thumbnail=True,
max_num=12)同样是从宽高比下手
aspect_ratio = orig_width / orig_height他会根据max_num 拆解成35组不同的宽高比,最极限的就是 1:max_num。
[(1, 1), (1, 2), (2, 1), (3, 1), (1, 3), (2, 2), (4, 1), (1, 4), (5, 1), (1, 5), (1, 6), (6, 1), (3, 2), (2, 3), (7, 1), (1, 7), (4, 2), (2, 4), (1, 8), (8, 1), (1, 9), (3, 3), (9, 1), (2, 5), (5, 2), (10, 1), (1, 10), (11, 1), (1, 11), (12, 1), (3, 4), (4, 3), (1, 12), (6, 2), (2, 6)]然后会通过逻辑代码的对比,找到一个失真最小的宽高比
target_aspect_ratio = find_closest_aspect_ratio(
aspect_ratio, target_ratios, orig_width, orig_height, image_size)由于base_size = 448,得到 image最接近的宽高比之后,需要相乘变成最后的图像大小。
target_width = image_size * target_aspect_ratio[0]
target_height = image_size * target_aspect_ratio[1]
blocks = target_aspect_ratio[0] * target_aspect_ratio[1]比如对于我们输入的图像尺寸是(w, h) = (1224, 926),最合适的宽高比是 (4, 3)。
target_width:1792 = 448 * 4
target_height:1344 = 448 * 3
接着就到了crop patch了。还是上面的例子 ,internvl会得到没有overlap的crop成 448x448的基础块。当然最后还有一个头图是直接把图像resize到448。
# 第0个patch (0, 0, 448, 448)
# 第1个patch (448, 0, 896, 448)
# 第2个patch (896, 0, 1344, 448)
# 第3个patch (1344, 0, 1792, 448)
# 第4个patch (0, 448, 448, 896)
# 第5个patch (448, 448, 896, 896)
# 第6个patch (896, 448, 1344, 896)
# 第7个patch (1344, 448, 1792, 896)
# 第8个patch (0, 896, 448, 1344)
# 第9个patch (448, 896, 896, 1344)
# 第10个patch (896, 896, 1344, 1344)
# 第11个patch (1344, 896, 1792, 1344)第三步 堆叠
还是上面这个case,就会得到 pixel_value,尺寸是 。
训练泛化性讨论
不同于qwen 的 整张图 resize,internvl 的crop patch输入是一种sliding window的方式。之前做分割的时候,或者low-level 任务,很多都是sliding window 然后merge。光通过建模方式也无法说qwen的好,还是internvl2.5的动态分辨率效果更好。我的感觉是视觉encoder架构出发,比如vit g的感受野已经很大了,无论哪种方式网络都能看全图像了,不论是patch化还是整张图,所以区分度不是很大,反而qwen2vl的实现更加简单一些。
token 数横向对比
除此之外,我们可以讨论下qwen2vl和internvl2.5对于相同图像的token花费,判断这种image tokenizer的性价比。还是 (w, h) = (1224, 926) 这张图像拿来讨论吧。
qwen2vl
图像的输入是 (2, 3, 924, 1232) ,qwen2vl需要 reshape成 如下格式喂给视觉编码器。reshape 过程太长,忽略。图像最后reshap的尺寸是 (5808, 1176) 。
grid_t * grid_h * grid_w, \
channel * self.temporal_patch_size * self.patch_size * self.patch_sizeqwen2vl vision encoder最后一个block的结构是
PatchMerger(
(ln_q): LayerNorm((1280,), eps=1e-06, elementwise_affine=True)
(mlp): Sequential(
(0): Linear(in_features=5120, out_features=5120, bias=True)
(1): GELU(approximate='none')
(2): Linear(in_features=5120, out_features=3584, bias=True)
)
)最后vision encoder 部分输出1452,3584这样一个 embedding,我们可以简单乘一下 算下这个embedding占用大小 1452x3584=5,203,968
internvl2
internvl 采用了自己研发的 InternVisionModel,最后的特征融合层会把特征转化为 896维度的向量
(mlp1): Sequential(
(0): LayerNorm((4096,), eps=1e-05, elementwise_affine=True)
(1): Linear(in_features=4096, out_features=896, bias=True)
(2): GELU(approximate='none')
(3): Linear(in_features=896, out_features=896, bias=True)
)所以,internvl会把13,3,448,448的patch块变成13,256,896的向量,原本448的空间维度首先下采样16倍,变成28,然后28x28的空间维度会一起变成256。所以一张 (w, h) = (1224, 926) 的图像会变成13x256=3328个token,token的维度是896。
当然,vlm还需要 eos 等符号,internvl 是 IMG_START_TOKEN + IMG_CONTEXT_TOKEN * self.num_image_token * num_patches + IMG_END_TOKEN。其他的
这样的标志符我们就忽略计算了,因为这些token很少。
最后的embedding大小是2,981,888。
讨论
对于 (w, h) = (1224, 926) 的图像,按照默认参数,internvl2.5的embedding大小是2,981,888,而qwen2vl是5,203,968,居然更大!这有些反直觉,因为qwen2vl只输入了一张图,但是internvl2.5crop 了12个patch堆叠输入。分析原因发现主要就是qwen vision encoder 输出的channel 维度(3584)太大了,并且internvl系列 patch之间没有overlap,只是多了个一个缩略图的patch额外计算。
但是能不能说qwen2vl就不行呐?qwen2vl可以调整max_pixel,实际在我的case中,我在缩小max_pixel 到1/2,1/4的时候,并没有发现qwen2vl的性能有明显下降,甚至1/2变得更好了一点点...
所以综上,目前来看,条条大路通罗马。对于默认设置,其实internvl2.5需要的image token embedding 更小,但是qwen2vl再调整max_pixel之后也不会造成明显的性能降低,仁者见仁了。peace
① 2025中国国际新能源技术展会
自动驾驶之心联合主办中国国际新能源汽车技术、零部件及服务展会。展会将于2025年2月21日至24日在北京新国展二期举行,展览面积达到2万平方米,预计吸引来自世界各地的400多家参展商和2万名专业观众。作为新能源汽车领域的专业展,它将全面展示新能源汽车行业的最新成果和发展趋势,同期围绕个各关键板块举办论坛,欢迎报名参加。

② 国内首个自动驾驶学习社区
『自动驾驶之心知识星球』近4000人的交流社区,已得到大多数自动驾驶公司的认可!涉及30+自动驾驶技术栈学习路线,从0到一带你入门自动驾驶感知(端到端自动驾驶、世界模型、仿真闭环、2D/3D检测、语义分割、车道线、BEV感知、Occupancy、多传感器融合、多传感器标定、目标跟踪)、自动驾驶定位建图(SLAM、高精地图、局部在线地图)、自动驾驶规划控制/轨迹预测等领域技术方案、大模型,更有行业动态和岗位发布!欢迎扫描加入

③全网独家视频课程
端到端自动驾驶、仿真测试、自动驾驶C++、BEV感知、BEV模型部署、BEV目标跟踪、毫米波雷达视觉融合、多传感器标定、多传感器融合、多模态3D目标检测、车道线检测、轨迹预测、在线高精地图、世界模型、点云3D目标检测、目标跟踪、Occupancy、CUDA与TensorRT模型部署、大模型与自动驾驶、NeRF、语义分割、自动驾驶仿真、传感器部署、决策规划、轨迹预测等多个方向学习视频(扫码即可学习)

④【自动驾驶之心】全平台矩阵


















 958
958

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









