



>>更多直播内容速戳👉🏻『自动驾驶之心知识星球』
在线高精地图是当下无图NOA的算法核心,而现有的算法在大感知范围下的表现依然较差。
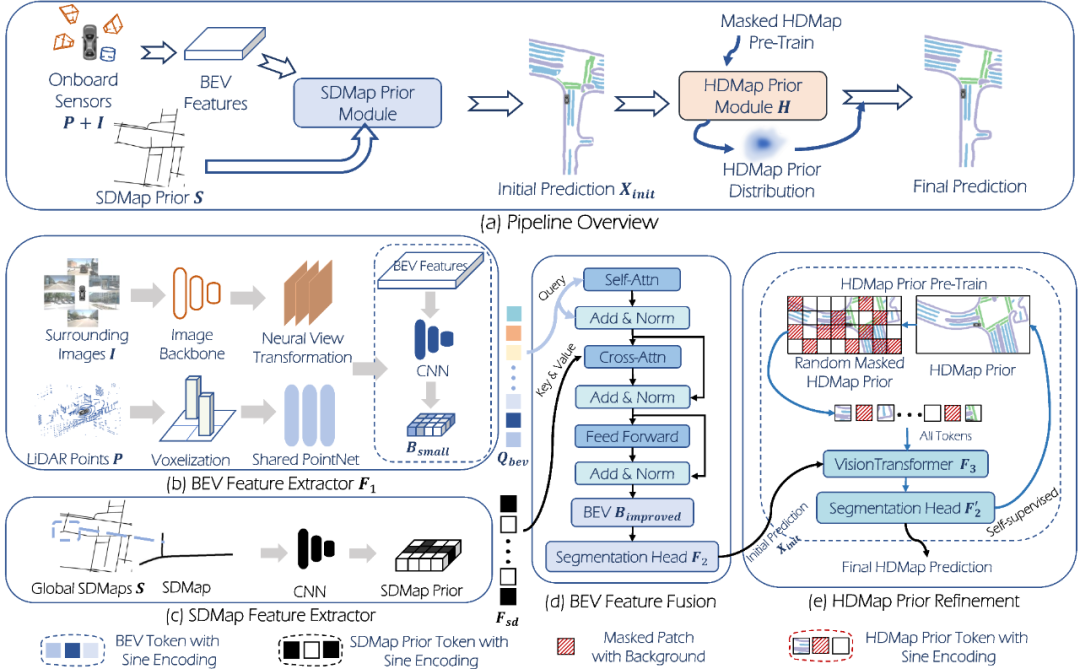
P-MapNet PipeLine
为此北理工&清华提出了P-MapNet,其中的“P”强调我们专注于融合地图先验以提高模型性能。具体来说,我们利用了SDMap和HDMap中的先验信息:一方面,我们从OpenStreetMap中提取了弱对齐的SDMap数据,并将其编码为单独的条件分支输入。尽管改输入与实际HD Map存在弱对齐的问题,我们基于Cross-attention机制的架构能够自适应地关注SDMap骨架,并带来显著的性能提升;另一方面,我们提出了一种用MAE来捕捉HDMap的先验分布的refine模块,该模块有助于让生成的HD Map更符合实际Map的分布,有助于减小遮挡、伪影等影响。
论文链接:https://arxiv.org/abs/2403.10521v3
代码链接:https://jike5.github.io/P-MapNet/
结果表明,P-Mapnet在nuScenes和Argoverse2数据集上取得了相当不错的效果,尤其是在240 x 60m的超大感知范围上表现惊艳!

国内首个自动驾驶学习社区
『自动驾驶之心知识星球』近4000人的交流社区,已得到大多数自动驾驶公司的认可!涉及30+自动驾驶技术栈学习路线,从0到一带你入门自动驾驶感知(端到端自动驾驶、世界模型、仿真闭环、2D/3D检测、语义分割、车道线、BEV感知、Occupancy、多传感器融合、多传感器标定、目标跟踪)、自动驾驶定位建图(SLAM、高精地图、局部在线地图)、自动驾驶规划控制/轨迹预测等领域技术方案、大模型,更有行业动态和岗位发布!欢迎扫描加入

点击下方卡片,关注“自动驾驶之心”公众号
ADAS巨卷干货,即可获取

















 1467
1467

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









