



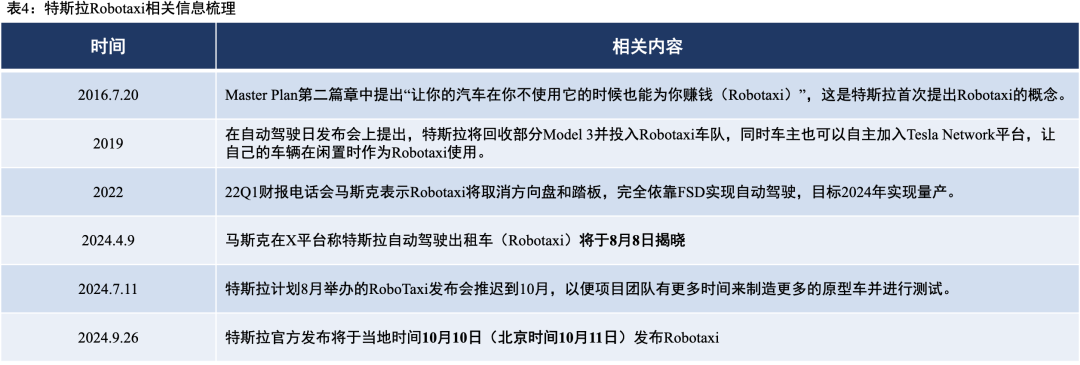
10月11日,特斯拉We Robot大会上发布了Robotaxi产品——Cybercap,完全去掉了方向盘和踏板,仅仅依靠中控屏幕完成乘客和车的指令交互。马斯克宣布未来的自动驾驶成本将会降低5倍到0.2美元每英里,而车本身的价格将不超过3万美元。

一起回顾下特斯拉的Robotaxi产品相关信息:
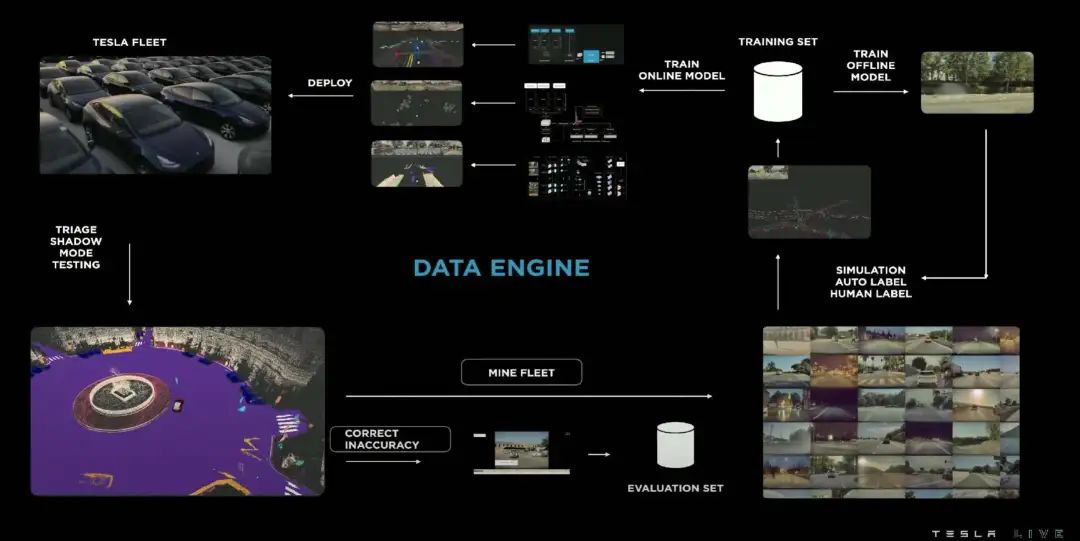
这个不得不提到FSD v12的升级,端到端的全新架构,让全自动驾驶和Robotaxi得到一种阶跃式改善。主要的更新如下:
算法端:采用全新端到端架构,优化了30万行C++代码,实现了数据收集、处理、规划到反应的自动化,成功避免了数据损失等风险。
硬件端:公司采用自研FSD2.0芯片构建HW4.0平台,实现纯视觉化解决方案。
数据端:公司构建自动标注下的数据训练闭环,目前拥有超过180万辆车辆和13亿英里的驾驶数据,实现训练数据上的遥遥领先。
算力端:公司采用自研Dojo集群,算力大幅提升,预计24年10月可达100E FLOPS。
FSD版本迭代一览:

前几年,特斯拉AI Day上透漏的技术方案,引领了整个自动驾驶行业的发展(包括BEV、OCC、数据闭环、无图、端到端等)。近两年,国内厂商的自动驾驶技术飞速发展,现在已经达到领先阶段。
据统计,新能源汽车的销售仍是特斯拉利润的最主要来源,2024年第二季度的财务显示,公司实现了总收入255亿美元,其中汽车销售收入199亿美元。中国是特斯拉model 3 和model Y的销售大国,特斯拉9月5日在X平台上发布路线图,预计2025年第一季度在中国和欧洲推出全自动驾驶(Full Self-Driving,FSD)系统,但仍有待监管批准。
中国的监管环境相对复杂,特别是在高精度地图和数据安全方面,中国政府对自动驾驶技术的要求非常严格。特斯拉需要与中国的本土企业合作,确保其自动驾驶系统符合中国的法规要求。为此,特斯拉已经与百度合作,获得了车道级的导航地图,以支持其FSD在中国的落地。随着FSD系统进入中国市场,预计将推动国内智能驾驶技术与产业链的快速发展,而地大华魔百将遇到强劲对手,从智驾算法到Robotaxi产品。
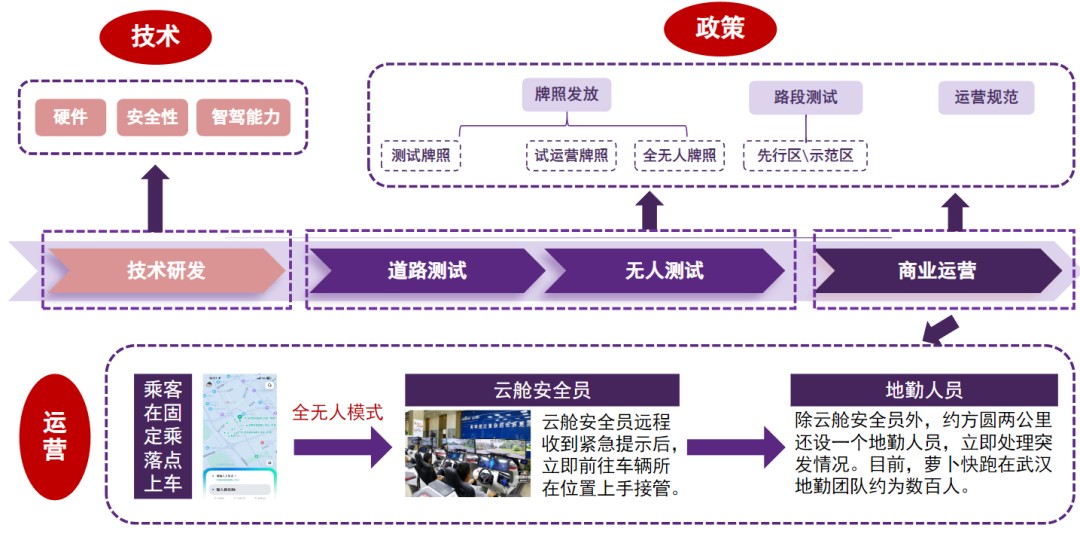
百度的萝卜快跑已经在武汉等地运营起来,在政策、技术和运营的多方努力下,将会越来越有竞争力。特斯拉也将受益于国内的政策和运营经验,进入国内的进程将会加快。
我们自动驾驶从业者,在技术深度上耕耘,更要在广度和前瞻上有所关注,这样一是可以根据大方向尽快更新自己的技术栈,避免陷入过时的技术陷阱;二是市场变化快,更换工作的频率将会大大提升,都会遇到“面试造火箭”的情况,所以“火箭”技术还是得时刻关注下,不能长期陷入现有项目的“杂事”上。
今天就带大家一起看下我们『自动驾驶之心知识星球』关于自动驾驶【行业前沿】及【自动驾驶最新技术】的相关内容和前沿讨论!涉及行业报告/科研界顶级大佬技术直播、从业感悟等等,应有尽有,现在加入还有现金钜惠~

行业前沿报告
星球经过筛选,精选了近100+行业前沿报告!这些报告内容新,角度也非常好,很适合小白和找方向的小伙伴:

2024年9月 脉脉高聘2024大模型人才报告
智能网联汽车全球十大发展突破成果发布
ECCV2024世界模型重磅成果Vista重磅材料
特斯拉发布Robotaxi,入华进程有序推进
端侧智能行业:人工智能重要应用,产品落地爆发在即
国内智驾的梯队也逐渐明朗了
展望:中国未来50年产业发展趋势白皮书
大模型落地路线图研究报告(2024年)
2030 年,人类将迎来YB数据时代
2024年汽车操作系统趋势及TOP10分析报告
Robotaxi的商业模式前景展望
关于生成式仿真的一些探讨(重点剖析开源工作DriveArena和LightSim)
Robotaxi商业化加速,高阶智驾未来已来
2024大模型十大趋势
华为智驾方案简剖
高级别自动驾驶商业闭环雏形已现
更多近100+自动驾驶和行业前沿报告星球都能免费获取!
技术前沿直播分享
更有顶级大佬的前沿技术直播视频分享:
通用可泛化的自动驾驶世界模型系列工作GenAD&Vista
智加提出DualBEV:基于双向统一权重的BEV检测
在线高精地图新思路MapTracker
自动驾驶超级鲁棒性感知论坛
交通流如何为自动驾驶算法提供应对CornerCase的挑战
自动驾驶闭环生成仿真平台DriveArena
基于连续路径建模的车道拓扑构建算法
ELM:自动驾驶具身场景理解
ECCV 2024的成果和鉴智机器人的校招专场
开放世界3D场景理解新思路
基于点集稀疏表征的占据网格预测
CarDreamer:首个开源世界模型自动驾驶平台
ScatterFormer,超越所有3D目标检测方案,问鼎Waymo
自动驾驶中的多模态大语言模型
基于矢量表征和概率规划的端到端自动驾驶
CVPR'24端到端自动驾驶挑战赛冠军方案Hydra-MDP
极佳科技:驾驶世界模型DriveDreamer v1&v2
迈向稳定的3D目标检测
Director3D:迈向真实世界的文本到3D生成
隐世界模型下的强化学习自动驾驶—Think2Drive
仿真器条件下的驾驶场景生成新方案SimGen
CVPR'24激光雷达仿真的最新进展DyNFL
面向具身智能的毫米波成像雷达感知
自动驾驶预测决策一体方法论和思考,探讨端到端范式及Waymo冠军方案
自动驾驶低光环境增强的多条件扩散模型LightDiff
端到端自动驾驶评测框架与生态思考—Bench2Drive
驾驶场景自适应的轨迹改进框架SmartRefine (CVPR2024)
给Tesla带来800倍提效的4D标注工具
星球还有近100+。。。


以上内容均摘自『自动驾驶之心知识星球』,欢迎加入与4000名从业人员一起变的更强!


















 1937
1937

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









