



点击下方卡片,关注“自动驾驶之心”公众号
戳我-> 领取自动驾驶近15个方向学习路线
概述
2024年9月30日,由清华AIR和港大MMLab,联合斯坦福大学、上海AI Lab、香港中文大学、慕尼黑工业大学、北航以及嬴彻科技等多家国内外单位,在意大利米兰的ECCV 2024大会上,成功举行了以“协同智能”为主题的自动驾驶与机器人Workshop。本次Workshop邀请了来自中国、美国、德国、日本等国家的专家,分享了协同自动驾驶领域的最新科研成果和产业进展。同时,还邀请了NVIDIA和Google的研究人员,介绍了在Foundation Model方面的最新研究进展。Workshop从提交论文中遴选了20篇高质量Poster论文(其中包括6篇Oral展示),并颁发了Best Paper和Outstanding Paper奖项。活动采用线上线下相结合的形式,吸引了大量观众参与,取得了非常好的反响和效果。


Workshop Event
会议伊始,来自清华AIR和港大MMLab的俞海宝博士简要回顾了Workshop的举办背景、论文接受情况以及会议流程。他指出,协同智能正逐渐成为人工智能领域的研究热点之一。
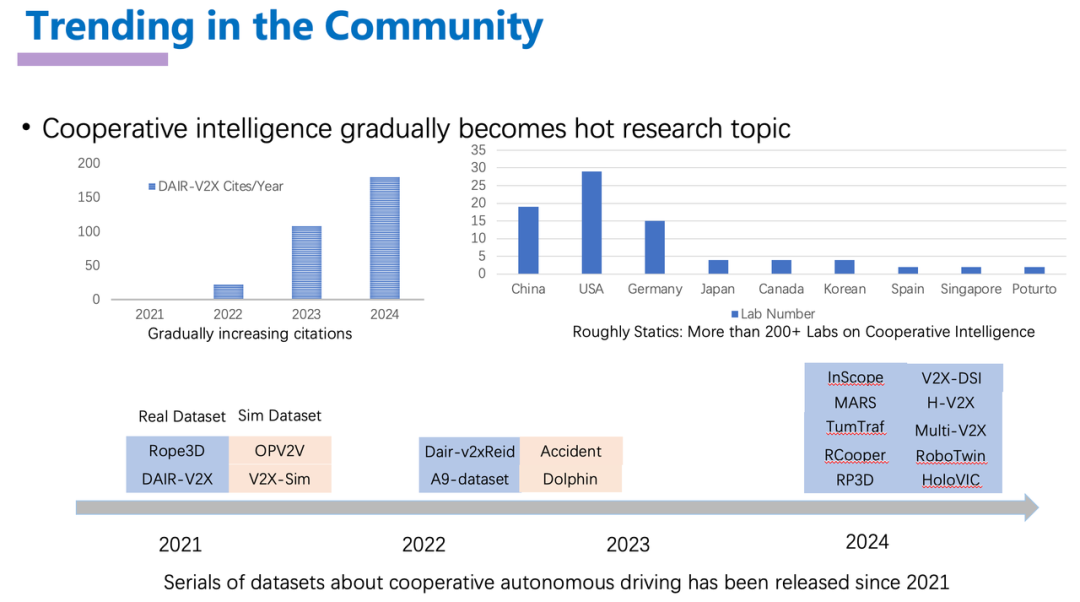
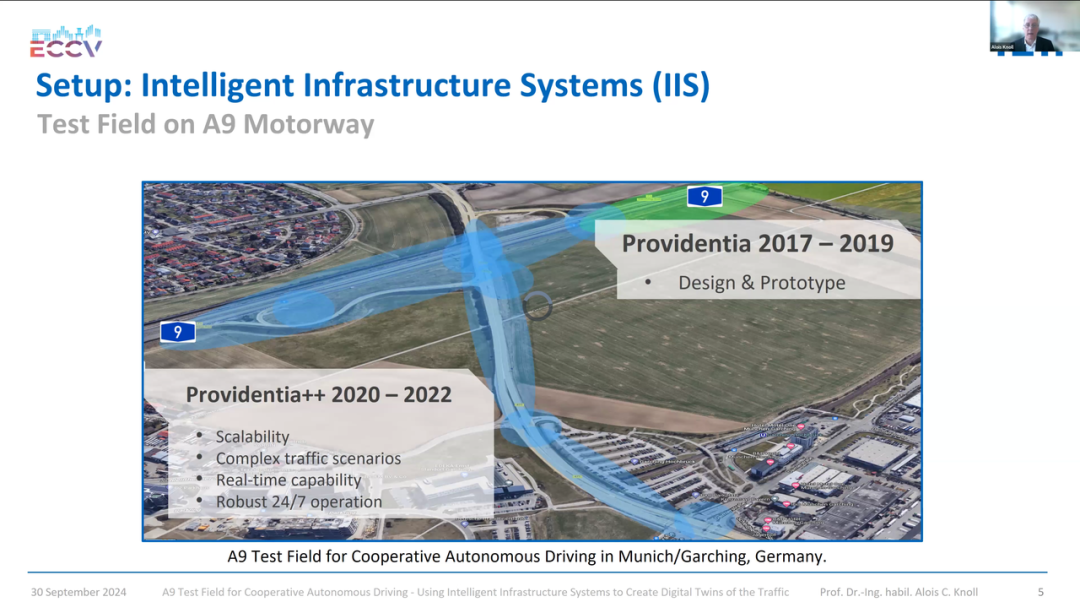
随后,来自德国慕尼黑工业大学的Alois Knoll教授分享了他的团队在德国车路协同示范区的建设和科研成果,重点介绍了近期发布的真实场景协同数据集——A9数据集。该数据集包含了路端和车端视角的图像和点云数据,均采自车路协同示范区。A9数据集与DAIR-V2X等数据集一道,将极大推动协同智能的研究进展。接着,美国UCLA的Jiaqi Ma教授展示了其Mobiltiy Lab团队在协同智能驾驶领域的一系列研究成果,包括开源框架OpenCDA和多个开源数据集如V2X-Real等。他还介绍了团队将V2X研究成果应用于实车测试的结果,这些研究成果和实车测试吸引了观众的极大关注。

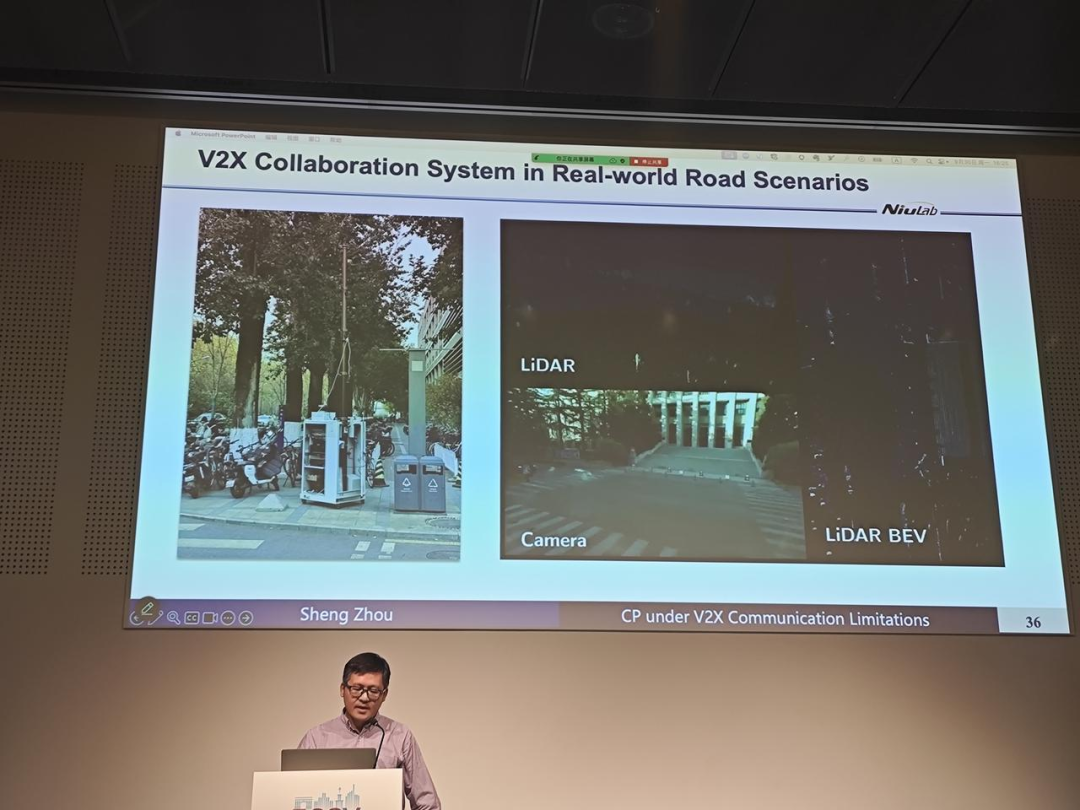
来自中国清华大学的Sheng Zhou教授从通信角度分享了其团队在V2X领域的最新进展,并提出了V2X科研需要与工业应用紧密结合的观点,得到了观众的广泛认同。随后,来自日本东京大学的Manabu Tsukada教授分享了其团队在东京开展的一系列车路协同和V2X研究成果,并展示了基于团队开发的Autoware仿真平台的测试结果。

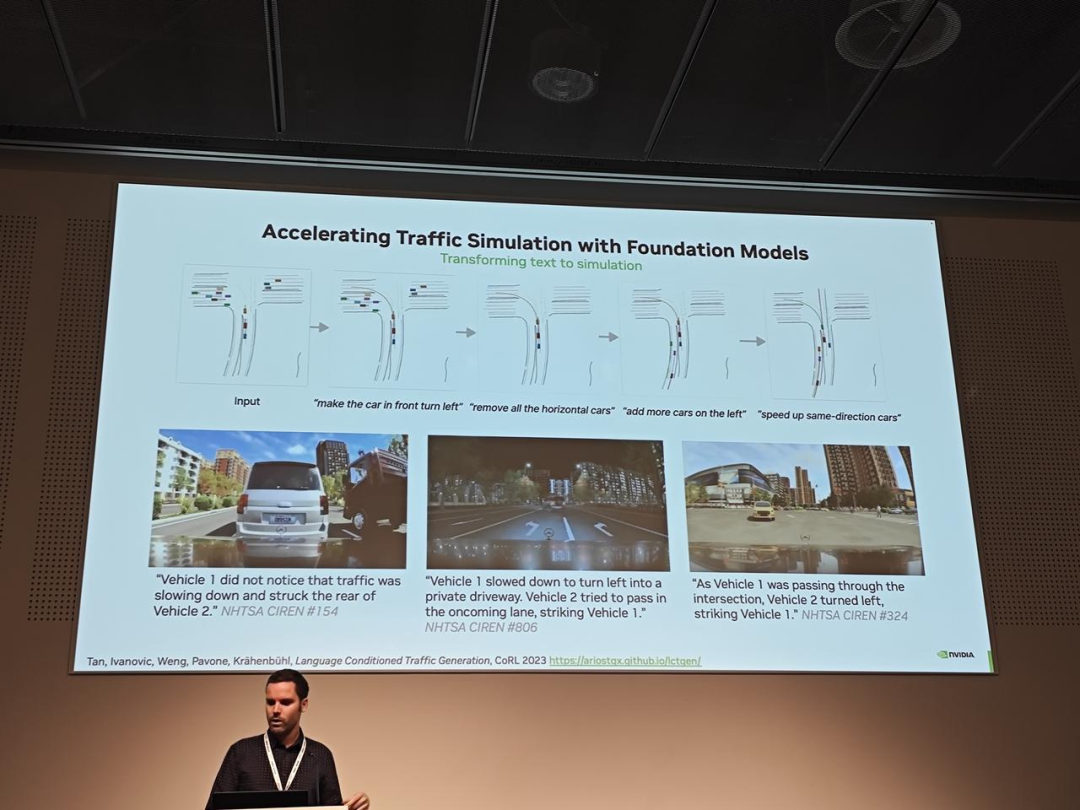
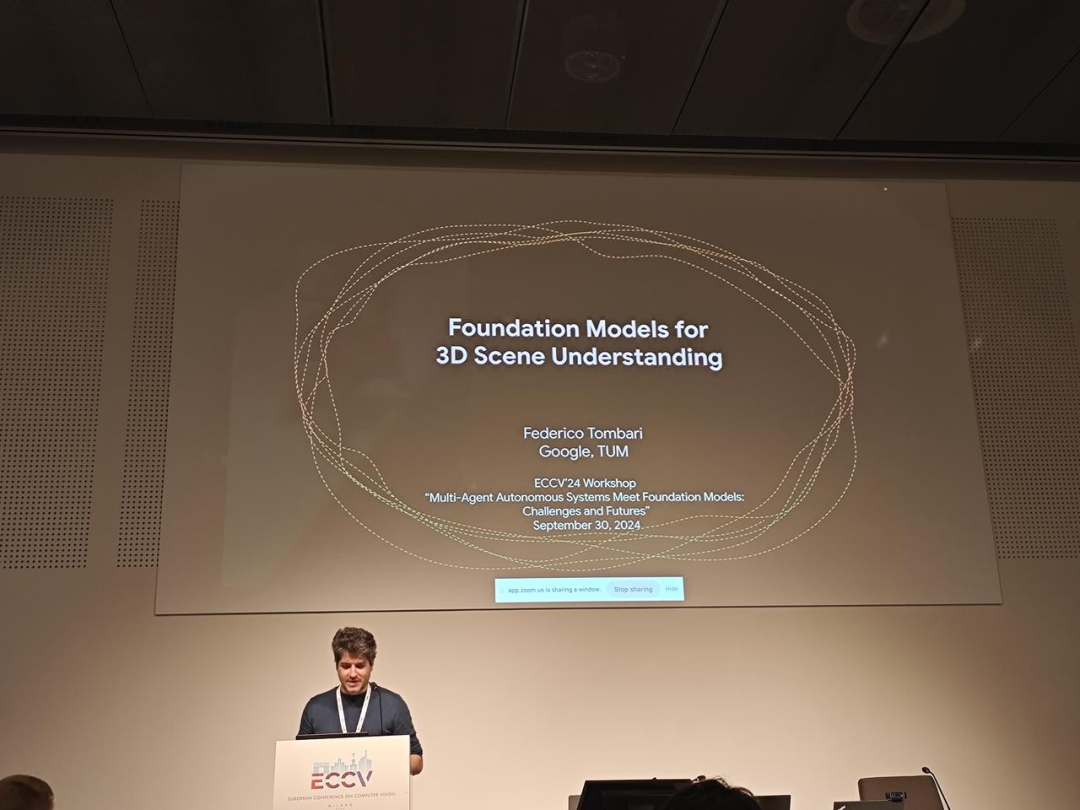
NVIDIA的Boris博士分享了Nvidia自动驾驶团队近期在world model和foundation model上的进展,并介绍了生成数据在实车测试中的实际应用。这一系列令人激动的成果给与会者留下了深刻的印象。随后,来自Google的Federico博士介绍了团队在3D场景理解方面的最新进展,强调了这一技术对自动驾驶和机器人发展的促进作用。
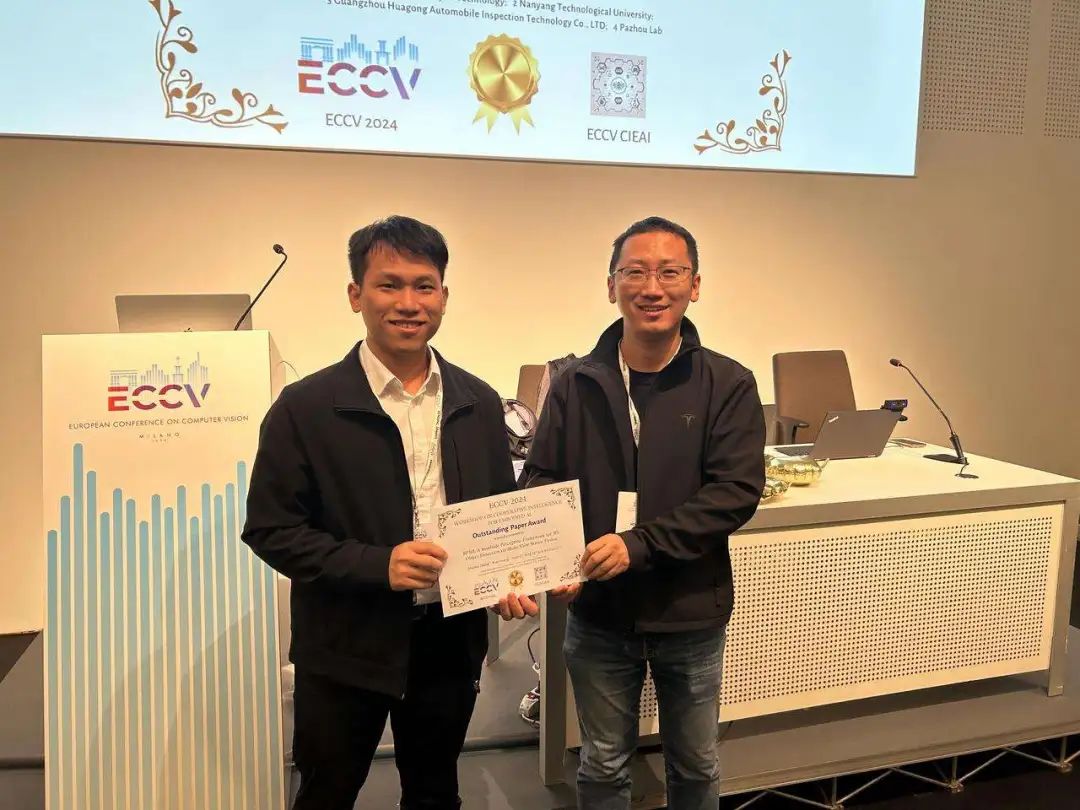
最后,来自香港大学的Robotwin团队获得了本次Workshop的Best Paper奖项。他们的工作发布了双臂协作的真实数据集,为协同机器人领域的发展带来了重要贡献。来自华南理工大学的RP3D团队则获得了Outstanding Paper奖项,他们提出了新颖的协同感知框架,并发布了适用于高速公路场景的真实协同数据集。清华大学助理教授赵昊博士及香港大学助理教授李弘扬博士为获奖团队颁奖。

在现场的Poster展示环节,讨论异常热烈。与会者们积极交流,深入探讨了各自的研究成果和见解,现场氛围十分活跃。
组织和赞助
最后,特别感谢各位Organizer和Program Committee对本次活动的大力支持。
相关链接和材料
Workshop Talk Record链接: https://hku.zoom.us/rec/share/_K9PGGUvFm_akJCvDfw8_MR98T5xcKx3y_vL3wrVT5qJVsbV9XSAEPG9tLvFFM57.pebGd72LWmOGw-eF(Passcode: 7TdLnjQ=)
Workshop主页:https://coop-intelligence.github.io/

















 1654
1654

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









