



作者 | 量子位 编辑 | 极市平台
点击下方卡片,关注“自动驾驶之心”公众号
戳我-> 领取自动驾驶近15个方向学习路线
本文只做学术分享,如有侵权,联系删文
导读
瞄准一个横亘在AI发展之路上十年之久的问题:数据集偏差。
MIT新晋副教授何恺明,新作新鲜出炉:
瞄准一个横亘在AI发展之路上十年之久的问题:数据集偏差。
该研究为何恺明在Meta期间与刘壮合作完成,他们在论文中指出:
尽管过去十多年里业界为构建更大、更多样化、更全面、偏差更小的数据集做了很多努力,但现代神经网络似乎越来越善于”识破”并利用这些数据集中潜藏的偏差。
这不禁让人怀疑:我们在消除数据集偏差的战斗中,真的取得了胜利吗?
数据集偏差之战,在2011年由知名学者Antonio Torralba和Alyosha Efros提出——
Alyosha Efros正是Sora两位一作博士小哥(Tim Brooks和William Peebles)的博士导师,而Antonio Torralba也在本科期间指导过Peebles。
当时他们发现,机器学习模型很容易“过拟合”到特定的数据集上,导致在其他数据集上表现不佳。
十多年过去了,尽管我们有了更大、更多样化的数据集,如ImageNet、YFCC100M、CC12M等,但这个问题似乎并没有得到根本解决。
反而,随着神经网络变得越来越强大,它们“挖掘”和利用数据集偏差的能力也越来越强了!
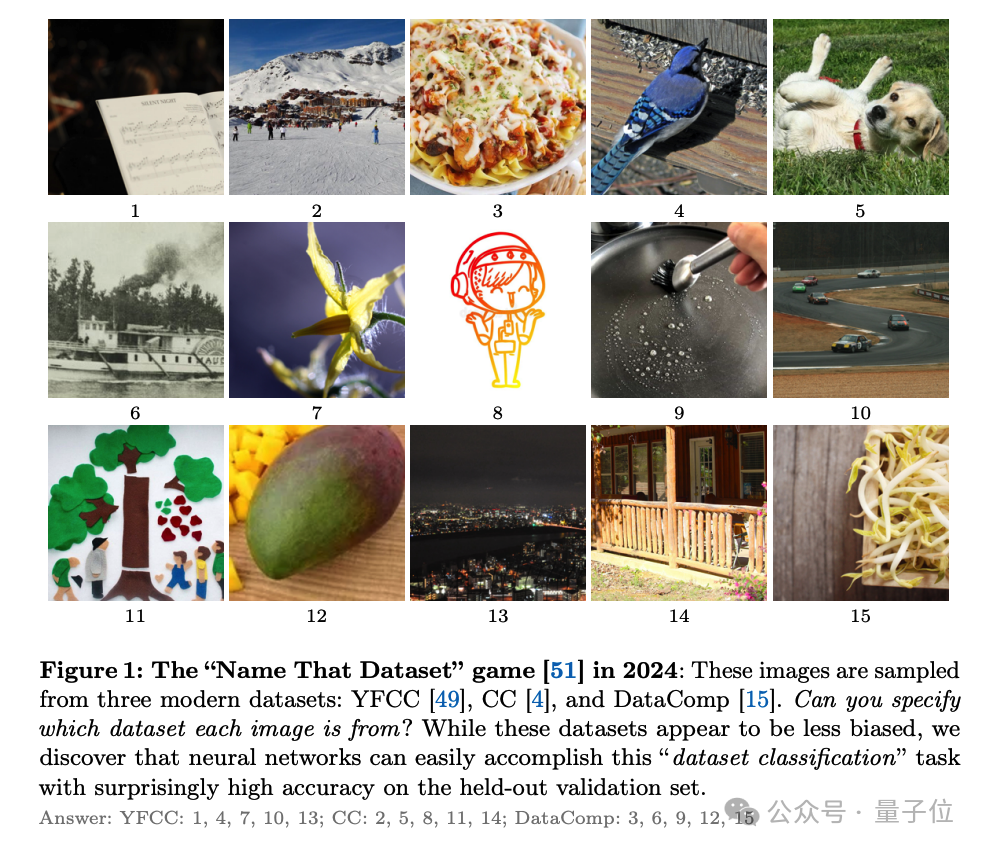
为了分析这个问题,何恺明团队设计了一个虚构的”数据集分类”任务。
听名字你可能就猜到了:给定一张图像,模型需要判断它来自哪个数据集。通过看模型在这个任务上的表现,就可以了解它们捕捉数据集偏差的能力。
现代AI轻松识破不同数据集
在实验中团队发现,各种现代神经网络架构,如AlexNet、VGG、ResNet、ViT等,在数据集分类任务上表现出惊人的一致性:它们几乎都能以超过80%的准确率区分不同数据集的图像!
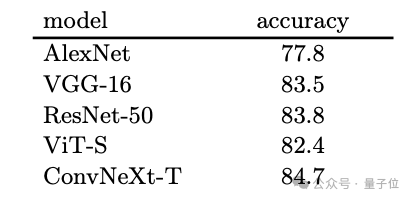
更令人吃惊的是,这个发现在各种不同的条件下都非常稳健:
不管是不同的数据集组合、不同的模型架构、不同的模型尺寸、不同的训练数据量,还是不同的数据增强方法,神经网络始终能轻松”一眼识破”图像的数据集来源。
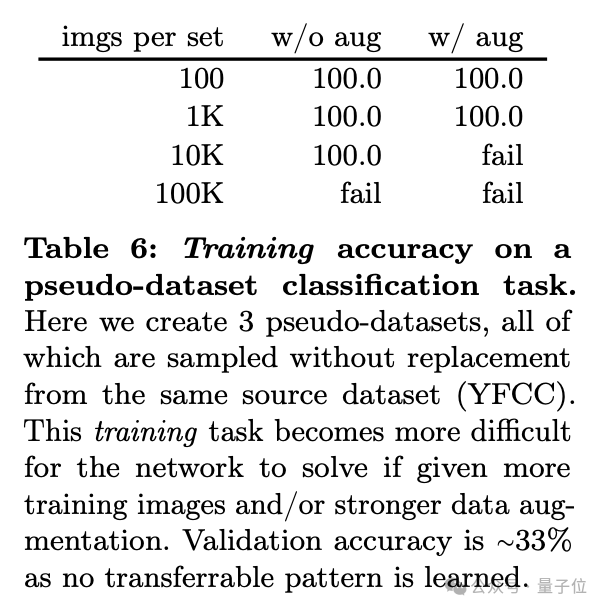
那么,神经网络是如何做到这一点的呢?是靠单纯的记忆,还是学到了一些更普适的规律?
为了揭开谜底,团队做了一系列对比实验。他们发现,如果把不同的数据集随机混在一起,神经网络就很难再区分它们了(准确率下降到了33%)。这说明,神经网络并不是在单纯地记忆每一张图像,而是真的学到了一些数据集特有的模式。
更有趣的是,即使在自监督学习的设置下,神经网络也展现出了惊人的”数据集辨识力”。在这种设置下,模型在训练时并没有用到任何数据集的标签信息,但当在这些自监督学习到的特征上训练一个简单的线性分类器时,它依然能以超过70%的准确率区分不同的数据集!
通过这一系列的实验,何恺明、刘壮等人的研究给我们敲响了警钟:尽管这十年我们一直在努力构建更大、更多样化的数据集,但数据集偏差这个问题似乎并没有得到根本解决。相反,现代神经网络越来越善于利用这些偏差来获得高准确率,但这可能并不代表它们真正学到了鲁棒、普适的视觉概念。
论文的最后,作者呼吁整个AI社区重新审视数据集偏差这个问题,并重新思考如何在算法和数据两个层面上来应对这一挑战。
CVPR最佳论文作者的通力合作
本文是何恺明在Meta期间,与Meta研究科学家刘壮合作完成。
现在,何恺明已经正式在MIT上岗,担任电气工程与计算机科学系的助理教授。他的“开学第一课”开课即火爆,在youtube上已经有2.9万的播放量。
和何恺明一样,刘壮本科毕业自清华,并且也是CVPR最佳论文奖得主——他是CVPR2017最佳论文DenseNet的第一作者。
2017年,刘壮从清华姚班毕业,进入加州大学伯克利分校攻读博士学位,师从Trevor Darrell,是贾扬清的同门师弟。
博士毕业后,刘壮进入Meta AI Research工作。在此之前,他已经在Meta实习了一年多时间,期间和谢赛宁合作,发表了ConvNeXt。
论文地址:
https://arxiv.org/abs/2403.08632
参考链接:
https://twitter.com/liuzhuang1234/status/1768096508082008289
投稿作者为『自动驾驶之心知识星球』特邀嘉宾,欢迎加入交流!
① 全网独家视频课程
BEV感知、毫米波雷达视觉融合、多传感器标定、多传感器融合、多模态3D目标检测、车道线检测、轨迹预测、在线高精地图、世界模型、点云3D目标检测、目标跟踪、Occupancy、cuda与TensorRT模型部署、大模型与自动驾驶、Nerf、语义分割、自动驾驶仿真、传感器部署、决策规划、轨迹预测等多个方向学习视频(扫码即可学习)

② 国内首个自动驾驶学习社区
国内最大最专业,近2700人的交流社区,已得到大多数自动驾驶公司的认可!涉及30+自动驾驶技术栈学习路线,从0到一带你入门自动驾驶感知(2D/3D检测、语义分割、车道线、BEV感知、Occupancy、多传感器融合、多传感器标定、目标跟踪)、自动驾驶定位建图(SLAM、高精地图、局部在线地图)、自动驾驶规划控制/轨迹预测等领域技术方案、大模型、端到端等,更有行业动态和岗位发布!欢迎扫描下方二维码,加入自动驾驶之心知识星球,这是一个真正有干货的地方,与领域大佬交流入门、学习、工作、跳槽上的各类难题,日常分享论文+代码+视频

③【自动驾驶之心】技术交流群
自动驾驶之心是首个自动驾驶开发者社区,聚焦2D/3D目标检测、语义分割、车道线检测、目标跟踪、BEV感知、多模态感知、Occupancy、多传感器融合、transformer、大模型、在线地图、点云处理、端到端自动驾驶、SLAM与高精地图、深度估计、轨迹预测、NeRF、Gaussian Splatting、规划控制、模型部署落地、cuda加速、自动驾驶仿真测试、产品经理、硬件配置、AI求职交流等方向。扫码添加汽车人助理微信邀请入群,备注:学校/公司+方向+昵称(快速入群方式)

④【自动驾驶之心】平台矩阵,欢迎联系我们!


















 5650
5650

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









