



 文章介绍了自动驾驶之心知识星球,一个专业且活跃的社区,提供技术答疑、深度干货、直播讲座和课程优惠,是转行学习自动驾驶的理想选择。
文章介绍了自动驾驶之心知识星球,一个专业且活跃的社区,提供技术答疑、深度干货、直播讲座和课程优惠,是转行学习自动驾驶的理想选择。
最近有不少刚入学和找工作的小伙伴咨询我该如何转行和学习自动驾驶,有没有什么好的技术路线可以参考?说实话,找对圈子,跟最专业的人一起学习十分重要。
自己深有体会的是,自学中经常会遇到各种奇怪问题,由于都是行业内的一些专业问题,网络上找的很困难,无异于大海捞针,浪费了大把时间,还得不到想要的答案。那去哪里提问能节省宝贵时间,并有专业回答呢?这里我推荐好朋友在做的社区:自动驾驶之心知识星球,是国内最大、最专业的自动驾驶社区。
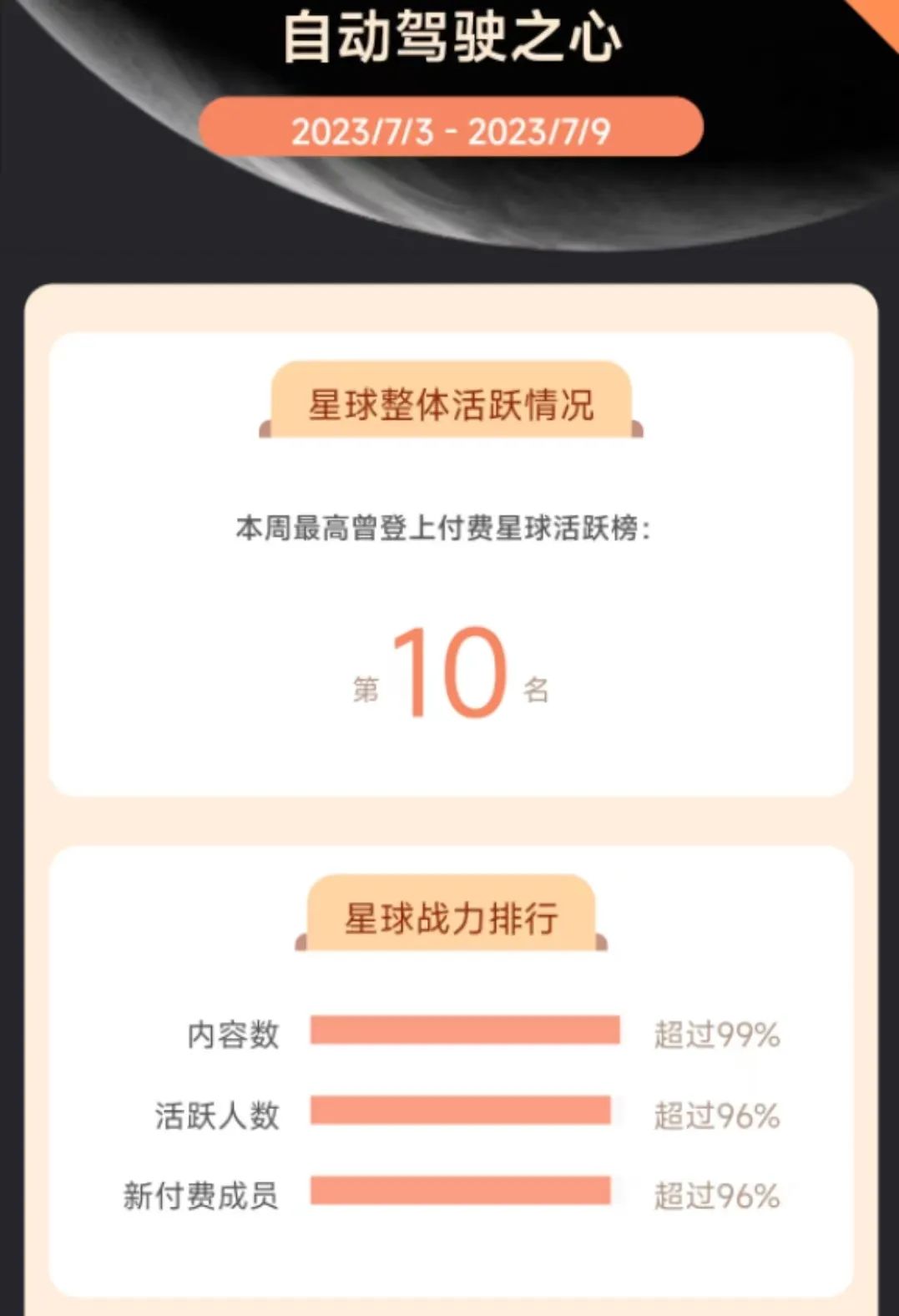
星球于2022年7月创立至今,输出了3100+的干货内容,星球活跃度长期排行前10名,吸引了近2000名行业学习爱好者,基本都是自动驾驶行业内各个方向的小伙伴,邀请来了50+位行业知名专家作为星球嘉宾,为大家答疑解惑,已经积累了500+条精华问答,问答都是行业内最实际的问题,且都会有专业的回答。为促进自动驾驶社区的发展,我们每周邀请自动驾驶行业大牛来直播分享技术和经验,至今已成功举办50+场直播分享研讨会,每场人数都近2000人,答疑环节大家讨论热烈,足见自动驾驶行业之前景开阔。

星球会员权益
1、免费获得50+专业嘉宾的答疑解惑(有问必答)
2、永久免费浏览、下载星球内容(目前3100+干货内容,每天更新,会员过期后,过期前的内容可继续免费浏览下载)
3、所有自动驾驶之心的付费课程8折优惠(价值1200元)
4、直播视频免费无限期回放(50+场行业直播,一年近100场)
5、免费赠送一门《目标检测与PyTorch入门实践课程》(16节课)
6、星球积分榜前10名,获得丰富现金奖励
7、免费咨询求职招聘相关问题
8、加入专属VIP群,获得最新资讯

新人加入优惠券!
目前我们已经完成了近30+的自动驾驶技术方向学习路线!如果你想转到自动驾驶、想了解最新的技术方向、招聘信息和求职攻略,我诚心推荐大家加入自动驾驶之心知识星球!这是一个能够all in one的地方(由于内容足够全,需要一点阅读时间,这里涵盖所有你想要的)
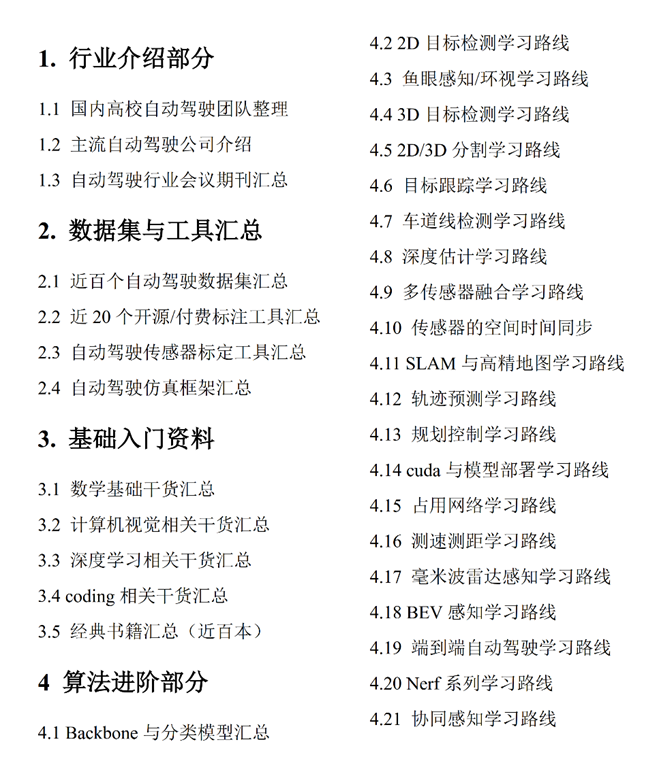
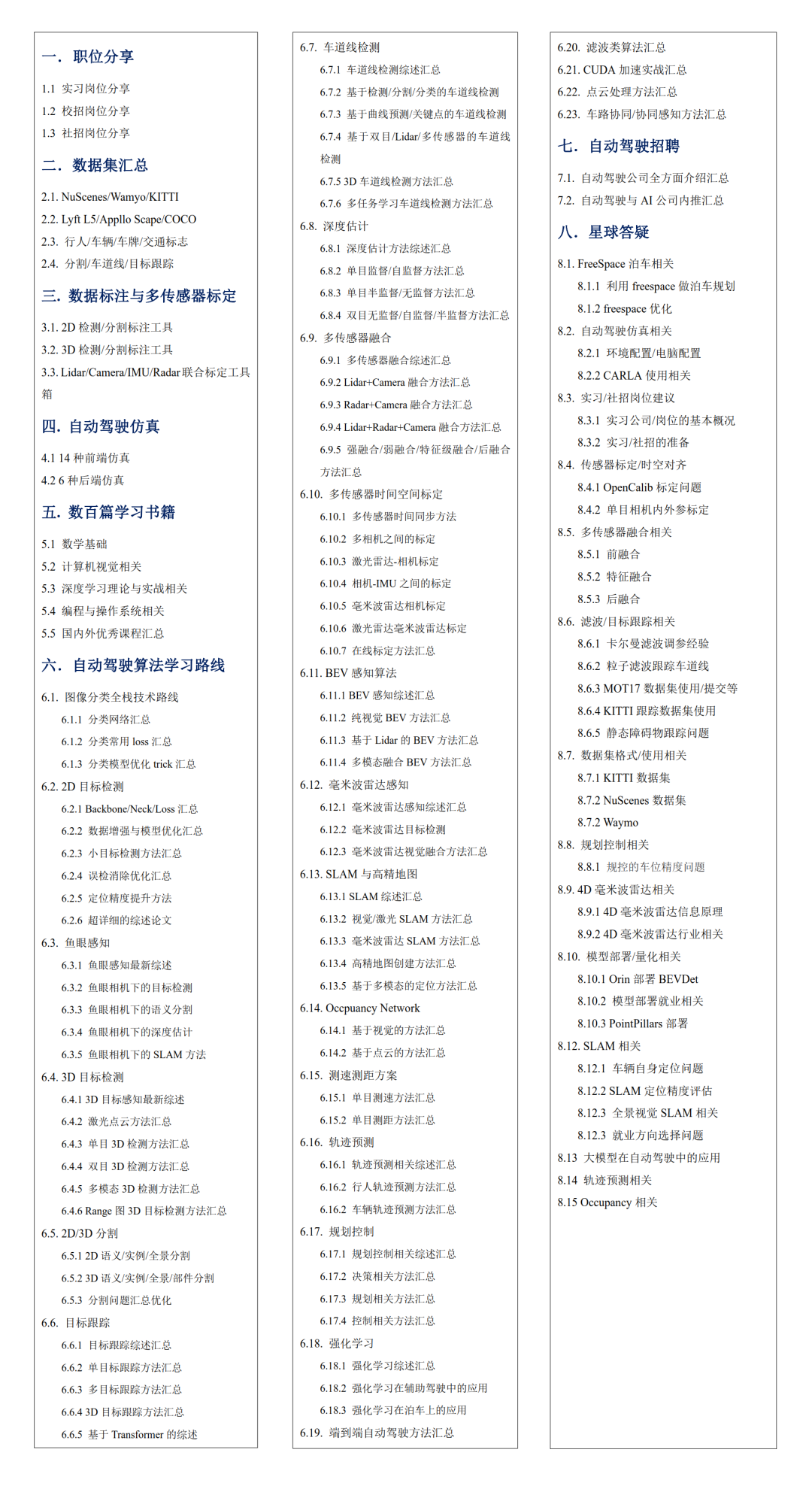
星球内容一览
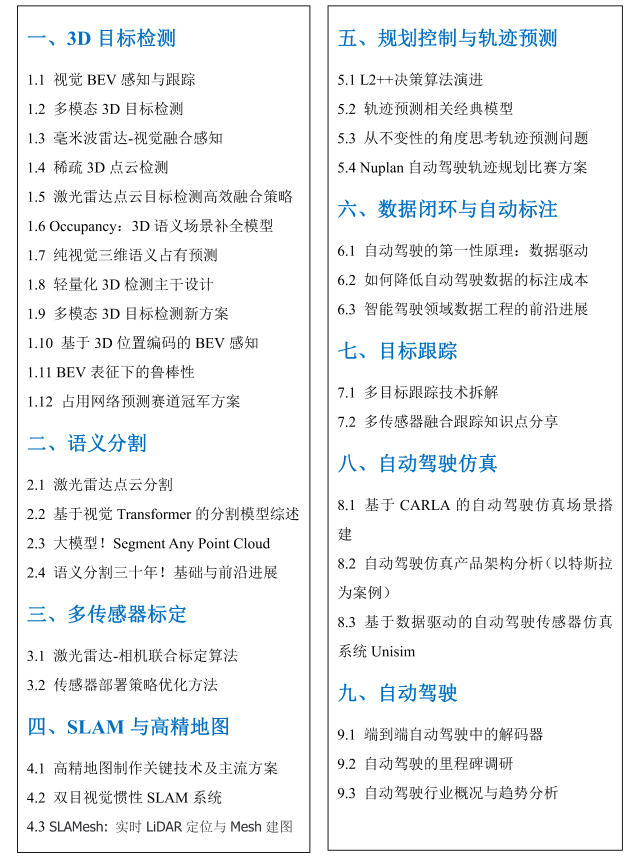
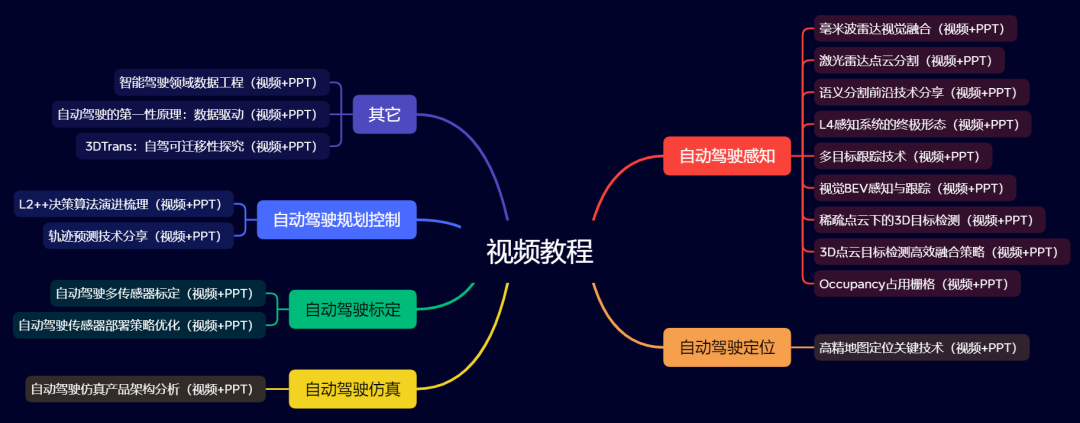
 自动驾驶之心近半年举办直播分享近50场,计划一年内给大家带来100场高质量直播分享,涉及传感器标定、3D目标感知、车道线、SLAM、目标跟踪、轨迹预测与规划控制、数据闭环与自动标注、自动驾驶仿真、自动驾驶产品及行业前沿动态等方向。这些高质量的视频及PPT资料,都备份在了星球内部,可以无限期回放学习,难能可贵的是,分享视频后都带有问答释疑,知其然,更知其所以然,这一直是我们坚信的方法论!
自动驾驶之心近半年举办直播分享近50场,计划一年内给大家带来100场高质量直播分享,涉及传感器标定、3D目标感知、车道线、SLAM、目标跟踪、轨迹预测与规划控制、数据闭环与自动标注、自动驾驶仿真、自动驾驶产品及行业前沿动态等方向。这些高质量的视频及PPT资料,都备份在了星球内部,可以无限期回放学习,难能可贵的是,分享视频后都带有问答释疑,知其然,更知其所以然,这一直是我们坚信的方法论!
最近自动驾驶之心也陆续开设了BEV感知、多传感器标定、多传感器融合、车道线检测、Transformer大模型、轨迹预测、规划控制、多模态3D检测、CUDA&TensorRT部署等一系列自动驾驶相关课程,后面会覆盖整个自动驾驶相关方向。这些课程前期准备了很长时间,邀请的讲师都是各个方向理论和实战兼备的大牛,质量有保证。针对咱们知识星球会员,所有课程都有8折的优惠。
最近星球的一些新变化
1、持续邀请重磅嘉宾加入(星球已有50+名行业内各方向嘉宾,为大家答疑解惑)
2、行业直播干货视频第一时间分享(直播当天完整版回放就上传星球)
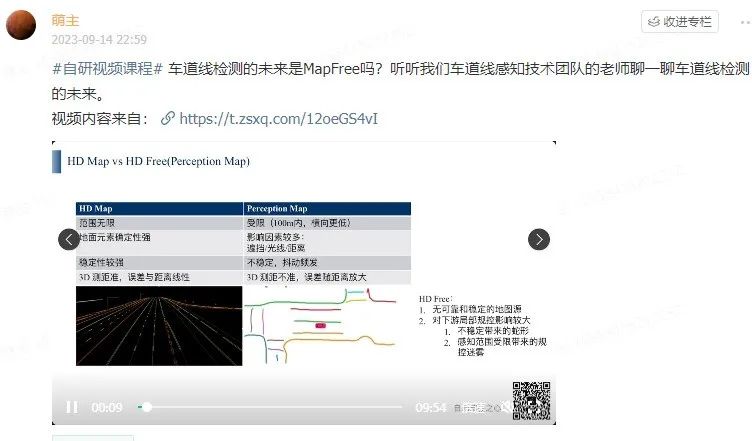
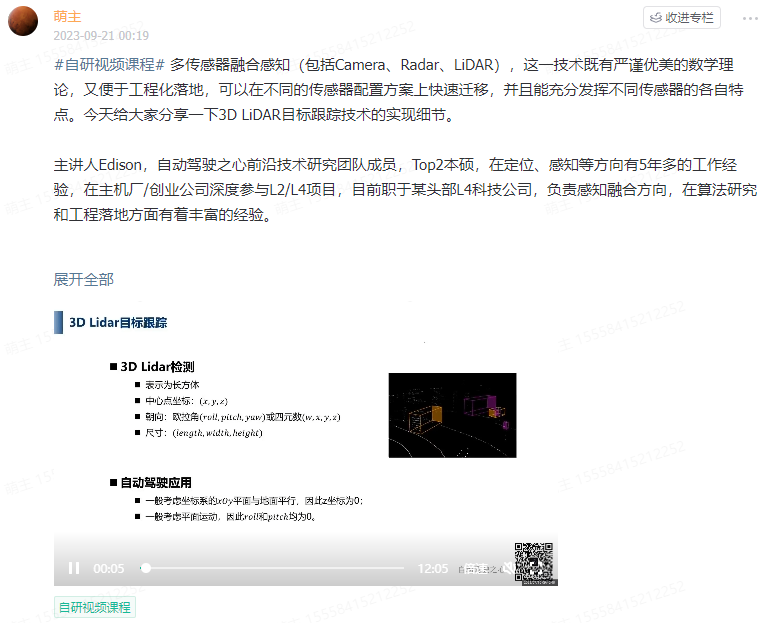
3、视频学习材料干货分享(干货知识点讲解)
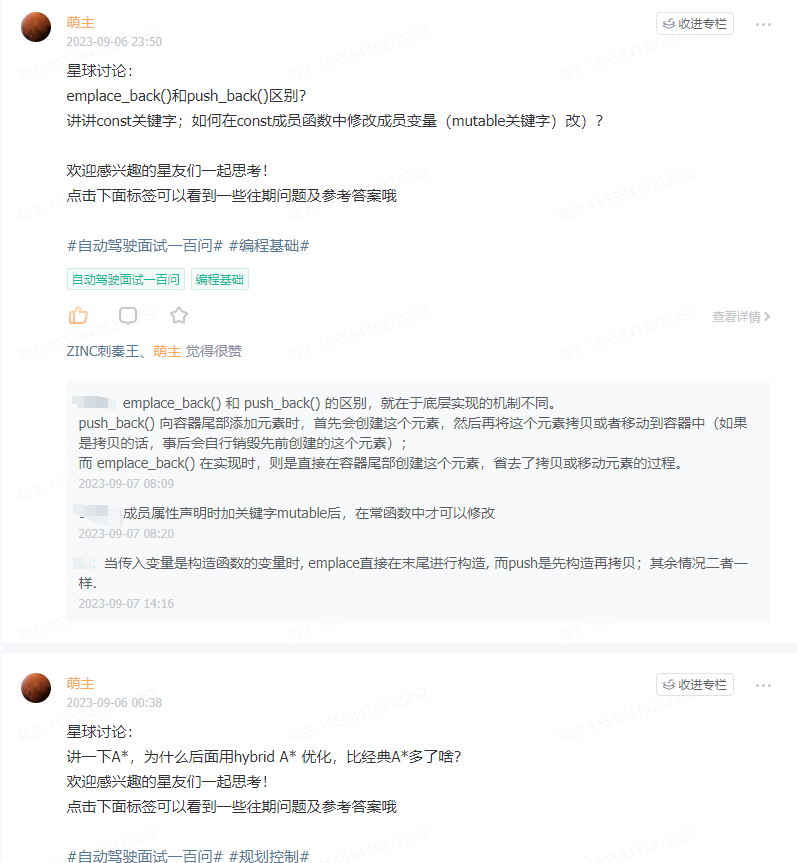
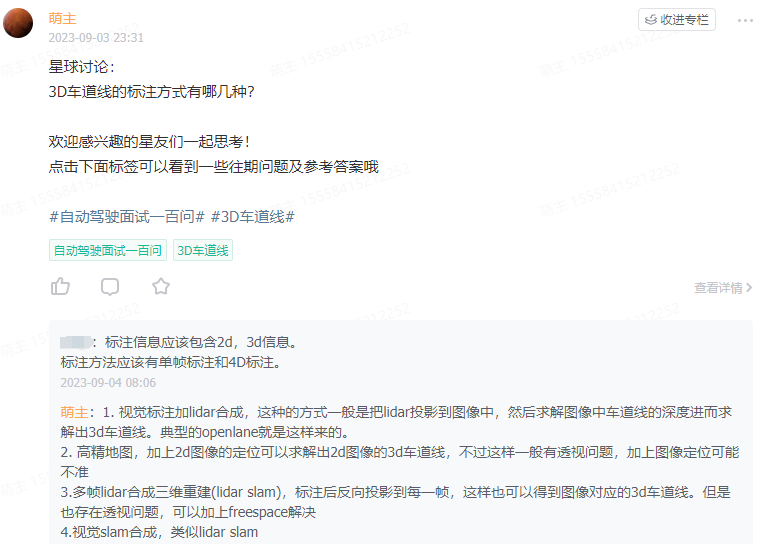
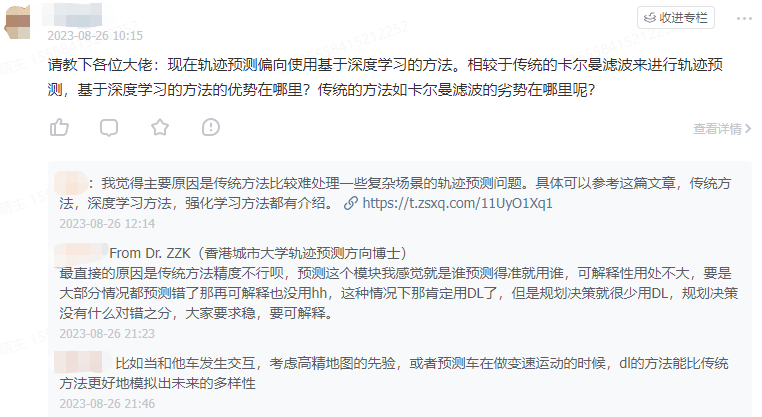
4、每天问题讨论(自动驾驶一百问系列,实用问题星球内一起讨论)


5、代码干货推荐(最新实用代码分享)

6、问答释疑
7、经典书籍分享
自动驾驶之心知识星球
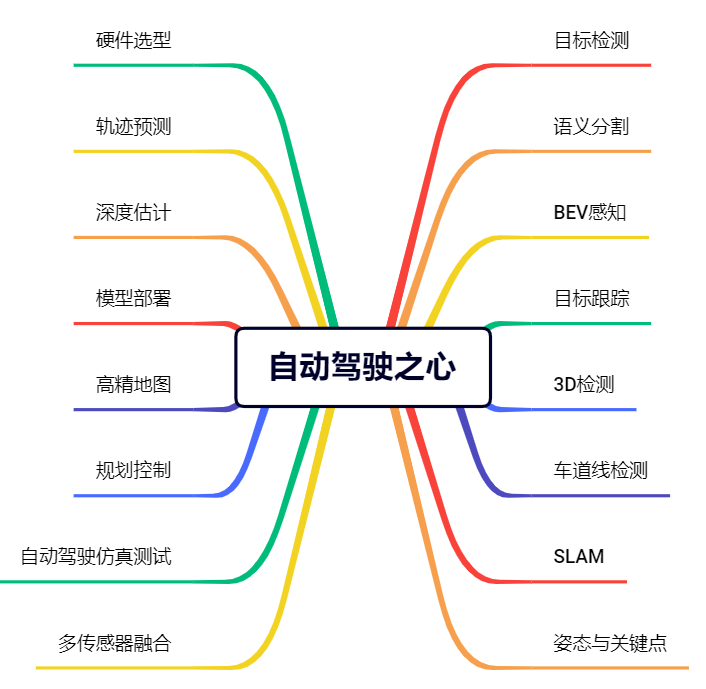
自动驾驶之心知识星球是首个以自动驾驶技术栈为主线的交流学习社区,这是一个前沿技术发布和学习的地方!我们汇总了自动驾驶感知(分类、目标检测、语义分割、实例分割、全景分割、关键点检测、车道线检测、3D感知、目标跟踪、多模态、多传感器融合等)、自动驾驶定位建图(高精地图、SLAM)、自动驾驶规划控制、领域技术方案、AI模型部署落地等几乎所有子方向的学习路线!除此之外,还和数十家自动驾驶公司建立了内推渠道,简历直达!这里可以自由提问交流,许多算法工程师和硕博日常活跃,解决问题!初衷是希望能够汇集行业大佬的智慧,在学习和就业上帮到大家!星球的每周活跃度都在前50内,非常注重大家积极性的调度和讨论,欢迎加入一起成长!
星球目前有哪些成员?
星球成员主要来自商汤科技、旷视科技、百度、阿里、网易、Momenta、Intel、Nvidia、赢彻科技、图森未来、智加科技、AutoX、大疆、上汽、集度、地平线、蔚来、小鹏、蘑菇车联、斑马、华为等业界知名公司,以及苏黎世理工、卡耐基梅隆大学、普渡大学、东京大学、香港中文大学、香港科技大学、香港大学、清华大学、上海交大、复旦大学、浙江大学、中科大、南京大学、东南大学、同济大学、上海科技大学、哈工大等国内外知名高校;
知识星球有哪些模块?
CV图文教程:网络结构可视化、算法原理图解;
视频教程:星球内部技术分享视频完成了几十场技术直播分享,包括语义分割、毫米波雷达视觉融合、BEV感知、Occupancy、多传感器标定、传感器部署、高精地图制作关键技术、规划控制、轨迹预测、自动驾驶行业与求职分析、自动驾驶仿真等多个方向(星球内部观看)!以及优秀开源课程,涉及相机标定、伯克利深度学习与计算机视觉、百度优达学城、Apollo自动驾驶、Udacity自动驾驶、MIT自动驾驶、Carla自动驾驶仿真等系列视频课程;


日常paper分享:BEV感知、3D目标检测、多模态融合、2D检测、分割、车道线、多任务学习、多目标跟踪、传感器空间和时间同步、鱼眼感知与模型、轨迹预测、高精地图、SLAM、规划控制、V2X、Occupancy network、NerF、测速测距、强化学习、VIT、轻量化等;
职位与面经分享:自动驾驶行业职位内推、面经分享、入门学习路线分享;
日常问答交流:和嘉宾星主交流领域学术工业最新进展,包括领域方案、工程实战问题、学术界前沿动态;
主要面向对象
星球创建的初衷是为了给自动驾驶行业提供一个技术交流平台,包括需要入门的在校本科/硕士/博士生,以及想要转行或者进阶的算法工程人员;除此之外,我们还和许多公司建立了校招/社招内推,包括地平线、百度、蔚来汽车、momenta、赢彻科技、集度、滴滴、Nvidia、高通、纵目科技、魔视智能、斑马汽车、博世、纽劢科技、追势科技、寒武纪等!
如果您是自动驾驶和AI公司的创始人、高管、产品经理、运营人员或者数据/高精地图相关公司,也非常欢迎加入,资源的对接与引进也是我们一直在推动的!我们坚信自动驾驶能够改变人类未来出行,想要加入该行业推动社会进步的小伙伴们,星球内部准备了基础到进阶模块,算法讲解+代码实现,轻松搞定学习!
日常讨论

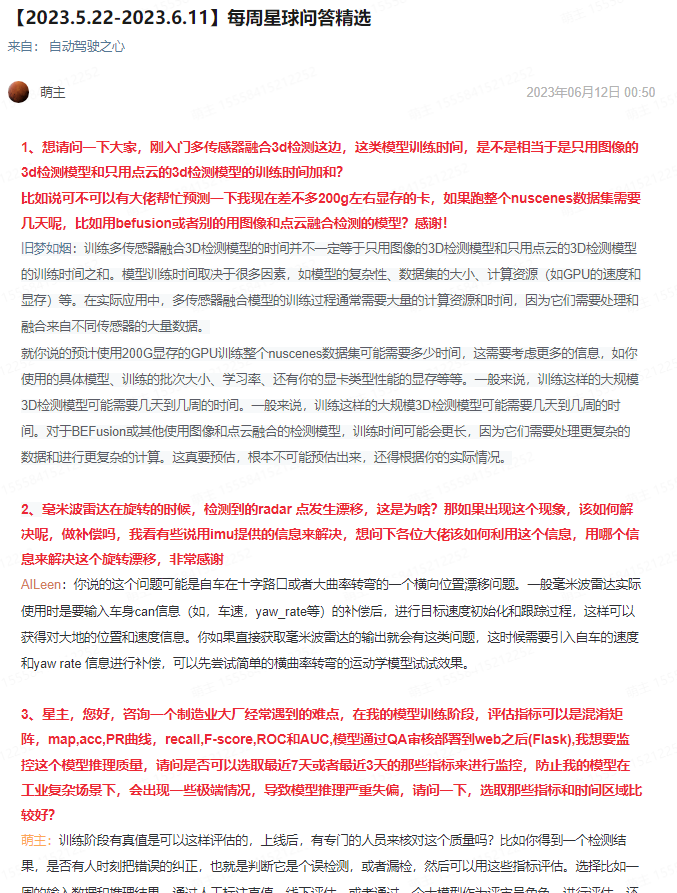
每周精选

日常分享


星球主要关注方向
0.自动驾驶顶会与公司
星球内部为大家汇总了CVPR、ECCV、IROS、RSS、TPAMI、IV、ICIP等自动驾驶领域顶会和顶刊,以及图森、智加、主线科技、集度、滴滴、纵目、元戎启行、momenta、蔚来小鹏理想等近80家公司介绍(可以内推!)
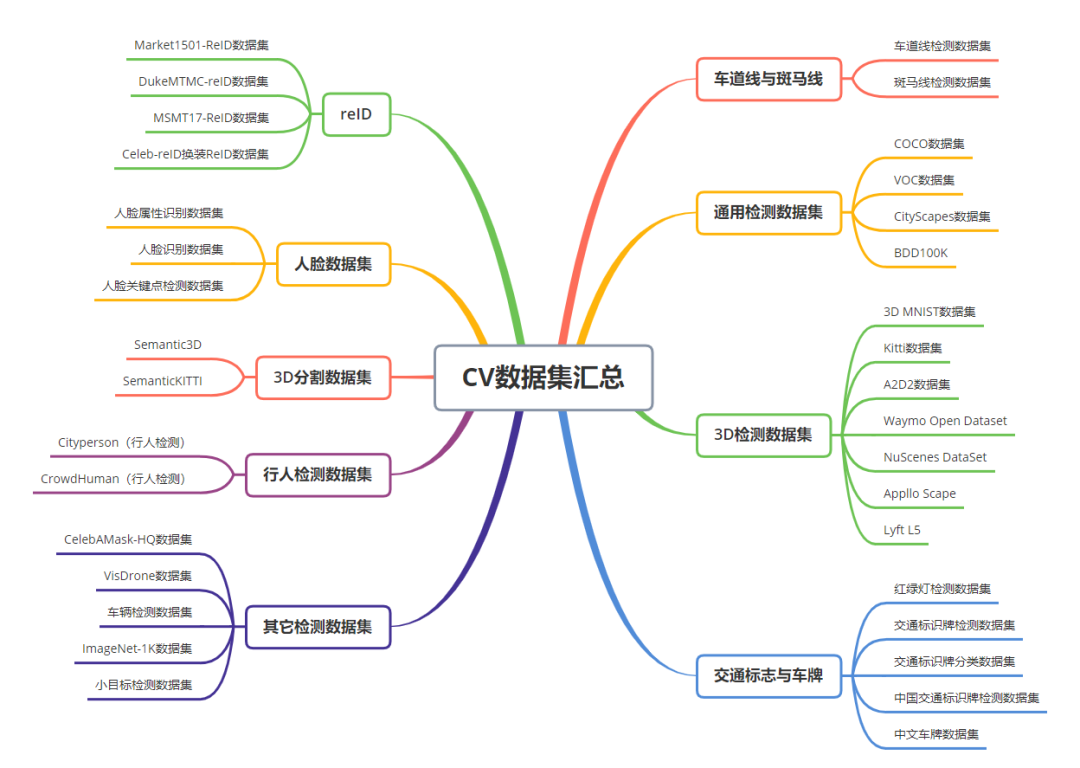
1. 计算机视觉相关数据集
数据集是AI任务的基石,然而大多数数据集都是国外机构开源,数据量较大,下载速度缓慢,这两个缺点导致很多研究人员在数据获取上为难,为此星球内部已经为大家准备了近30种计算机视觉和自动驾驶相关数据集,包括KITTI、Waymo Open Dataset、Lyft L5、COCO、Semantic3D、A2D2数据集、车道线数据集、车牌数据集、行人检测数据集、红绿灯检测数据集等,一键下载;
2. 2D/3D标定工具与仿真
星球内部为大家汇总了2D检测、3D点云检测、语义分割、实例分割、3D点云分割、视频检测、交互标定、多传感器标定等工具,还有各类仿真框架,可以快速适配到自己项目中。

3. 基础学习资料
整理了从自动驾驶感知、跟踪、滤波专业算法技术,到深度学习数学基础和图像处理、经典计算机视觉算法、Opencv、Pytorch以及C++、Python、GPU和Cuda近50本pdf学习资料!




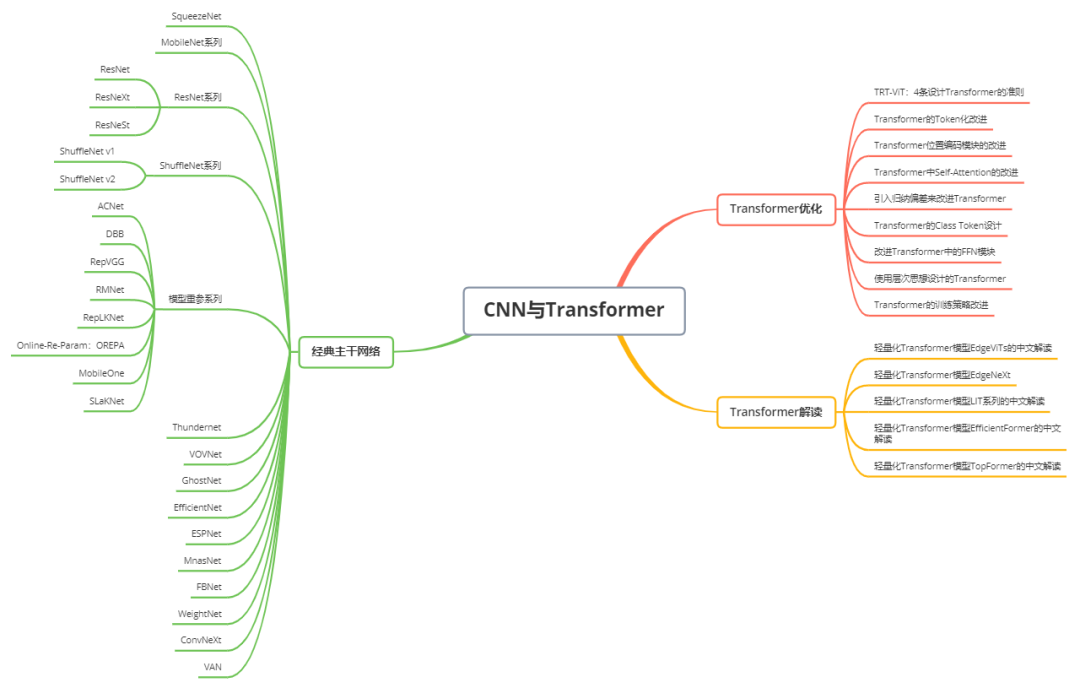
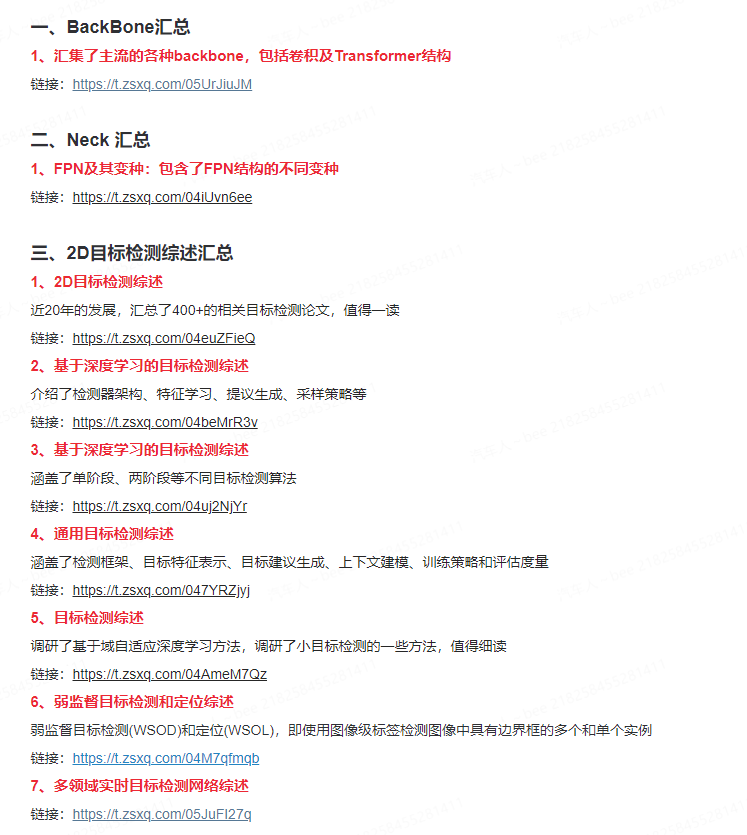
4. Backbone与Transformer
主要关注常用的轻量化、高性能backbone,以及视觉transformer结构与优化;
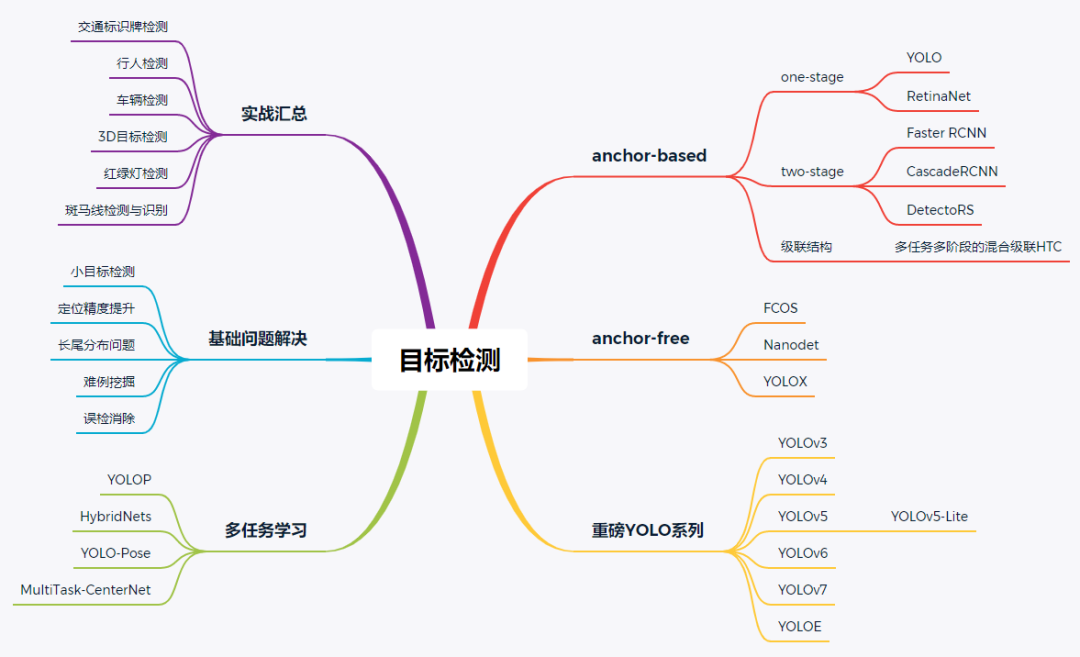
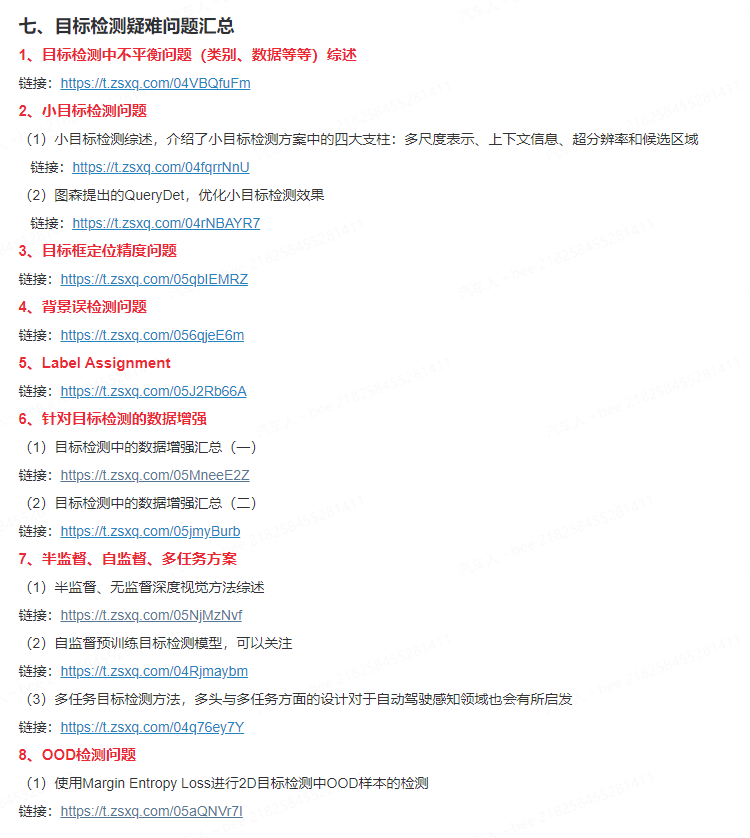
5. 2D目标检测
关注anchor-based、anchor-free、one-stage、two-stage、超全YOLO系列、小目标检测、多任务模型、长尾分布、误检消除、难例挖掘、定位精度优化等内容;该模块汇总检测领域的经典综述和论文,从结构、数据增强策略、采样策略、不均衡问题、半监督、知识蒸馏上展开研究;

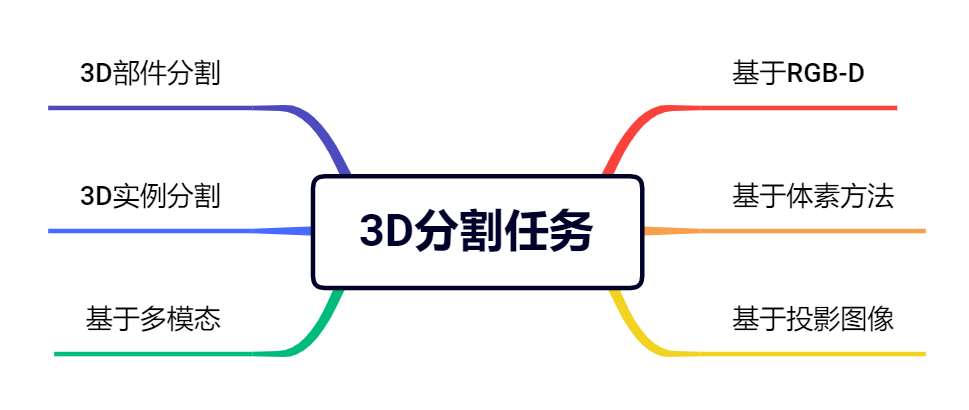
6. 分割任务
汇总了常见的2D语义分割、实例分割、全景分割以及3D点云分割SOTA算法,并对分割任务中的边缘轮廓分割模糊不细腻问题展开讨论;

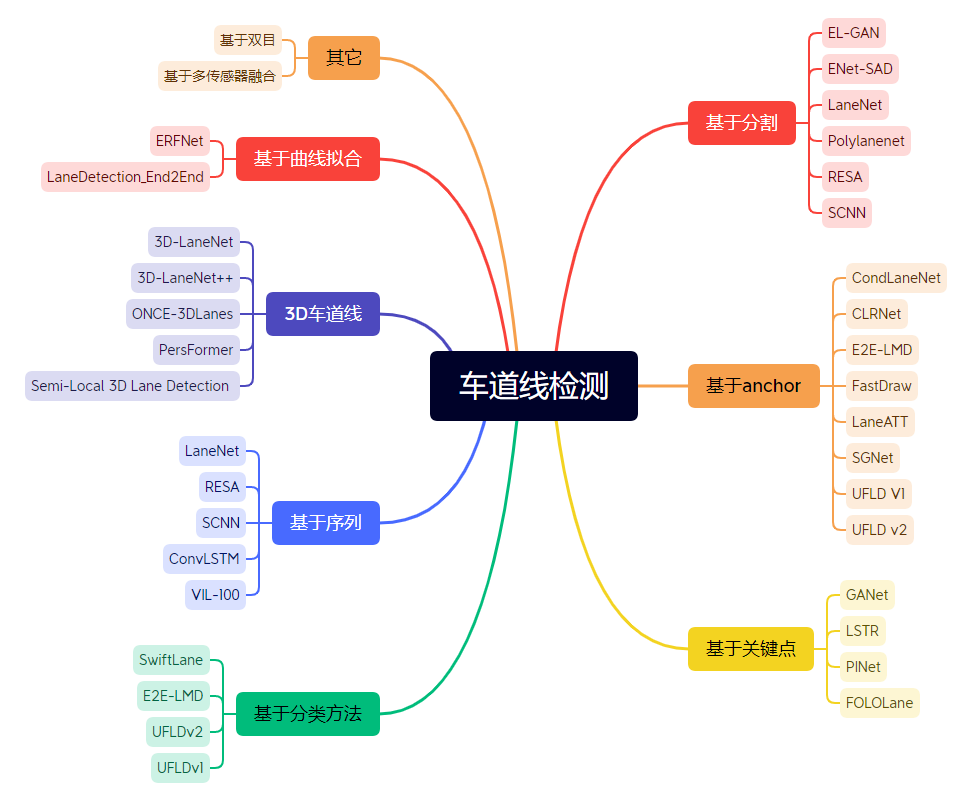
7.车道线检测
对基于检测、分割、分类、关键点、曲线预测、多传感器检测、3D车道线SOTA方法进行了汇总,对车道线遮挡、磨损、不连续问题展开了讨论!
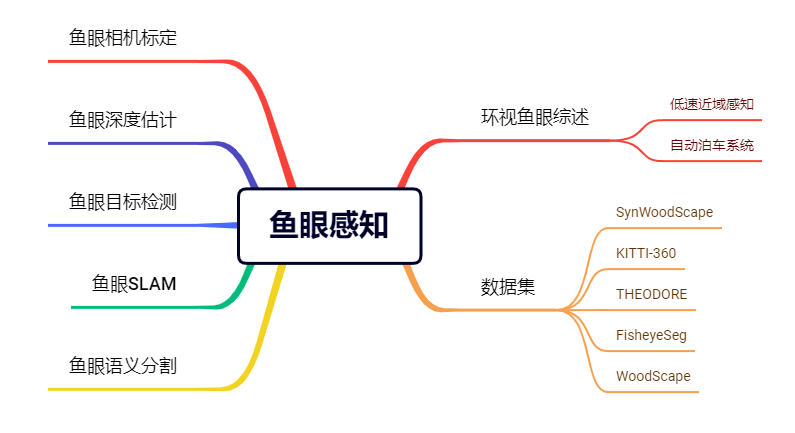
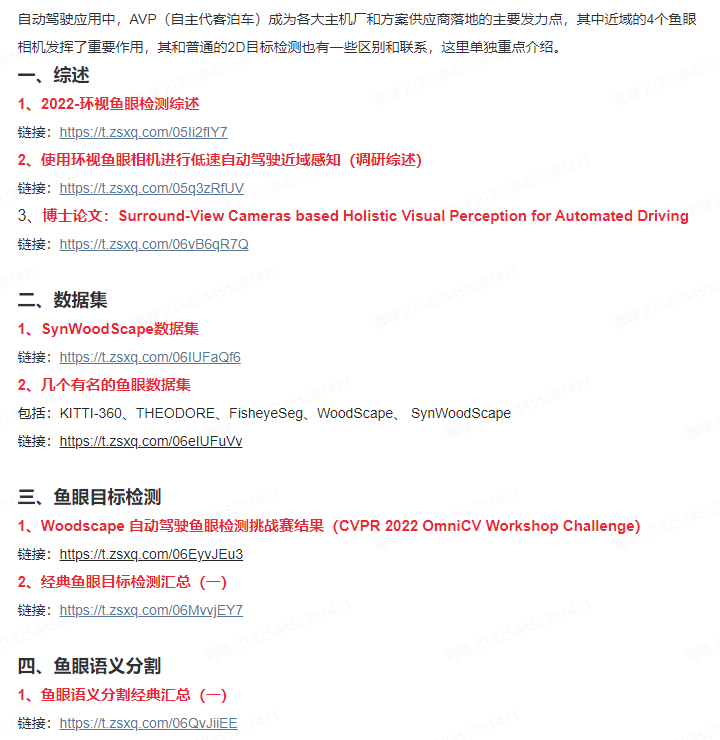
8.鱼眼感知
针对鱼眼和全景相机在自动泊车、近域感知上的应用展开,主要包括相机标定、鱼眼全景相机系统、自动泊车系统、环视数据集、鱼眼深度估计、鱼眼目标检测、鱼眼SLAM、语义分割等方向!

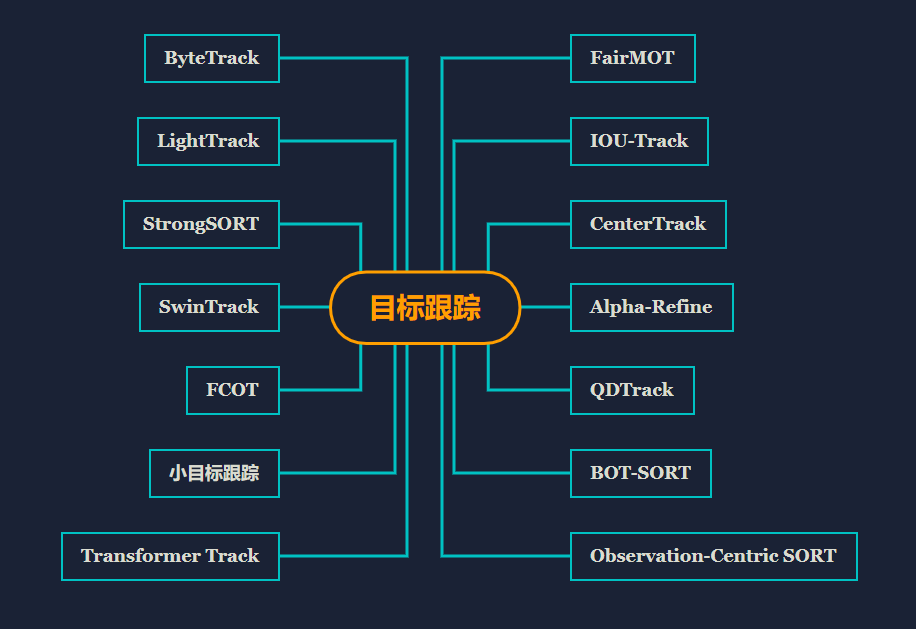
9.目标跟踪
针对单目标和多目标跟踪,基于Siamese Network、Tracking-by-detection、传统滤波+关联算法、end2end等方法进行全面展开阐述,后续更会加入变速情况下的跟踪系统;

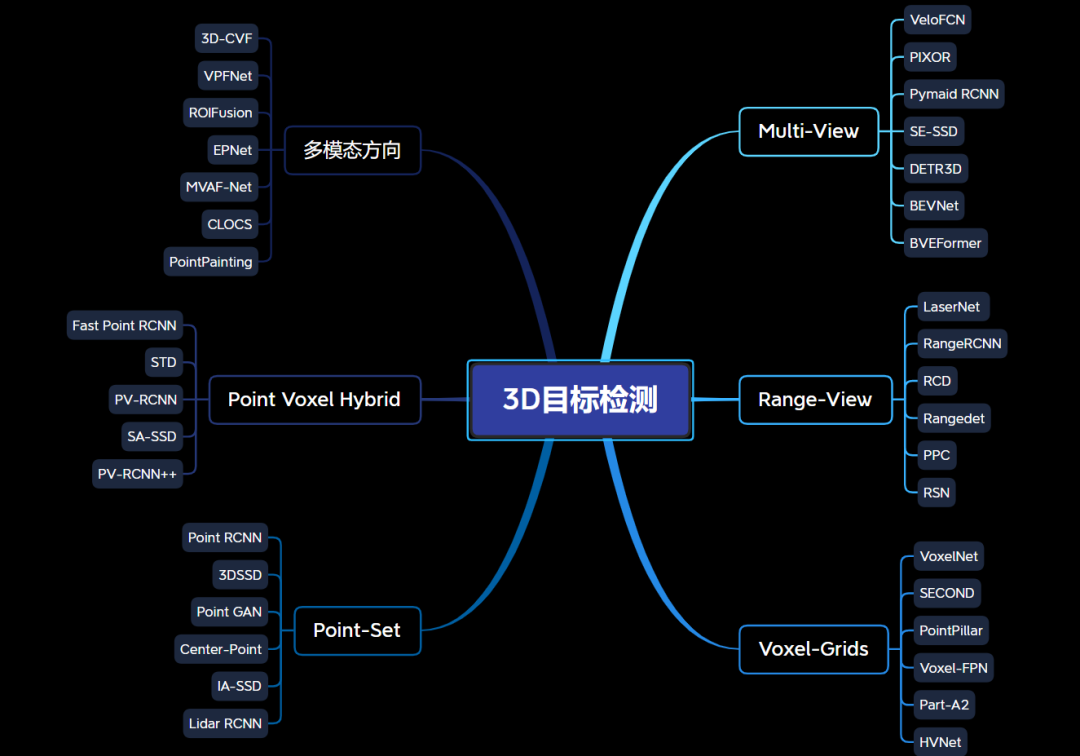
10.3D目标检测
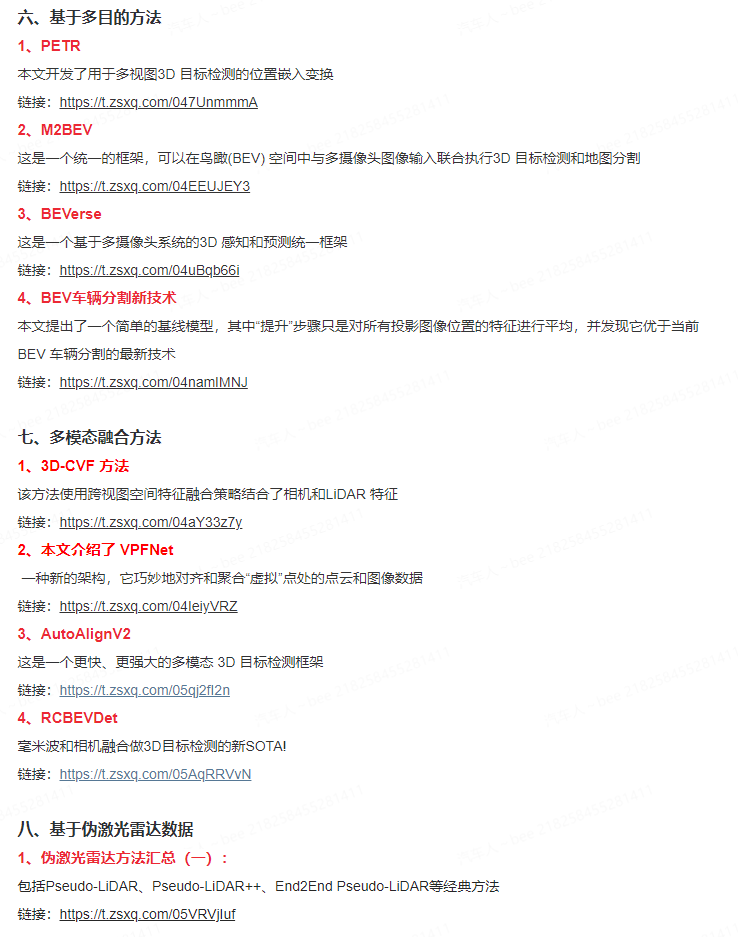
从点云和多模态数据3D检测任务展开,基于BEV、点、体素、多camera数据的3D检测方案;



11.传感器标定
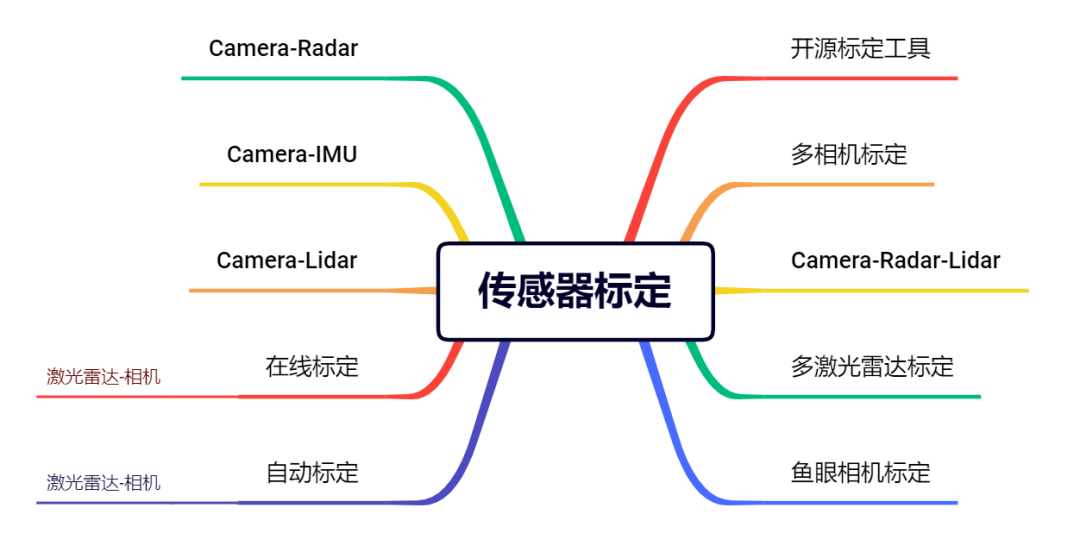
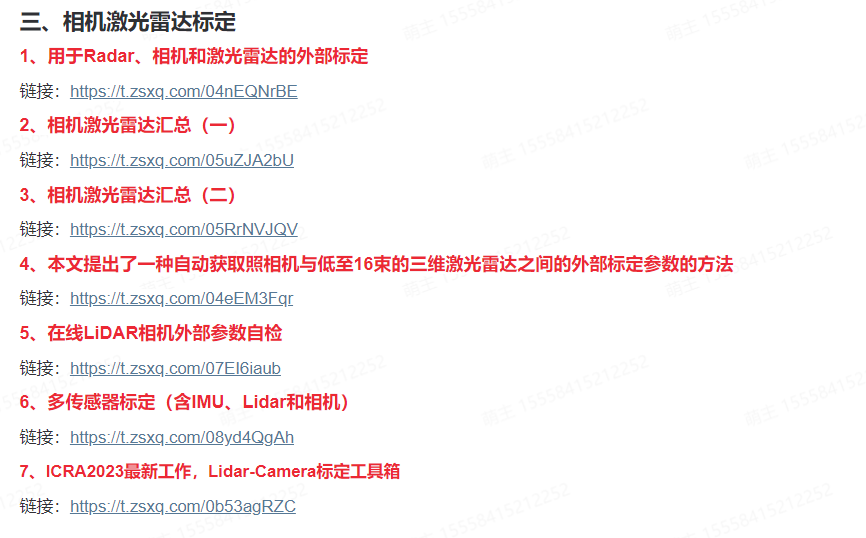
主要关注自动驾驶领域常见的Camera、Lidar、Radar、IMU之间的离线、在线标定,多相机、多激光雷达之间的标定,自动标定,传感器时间同步等;



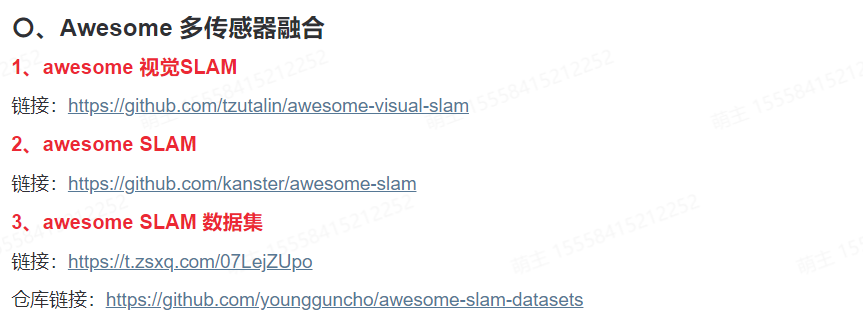
12.多传感器融合
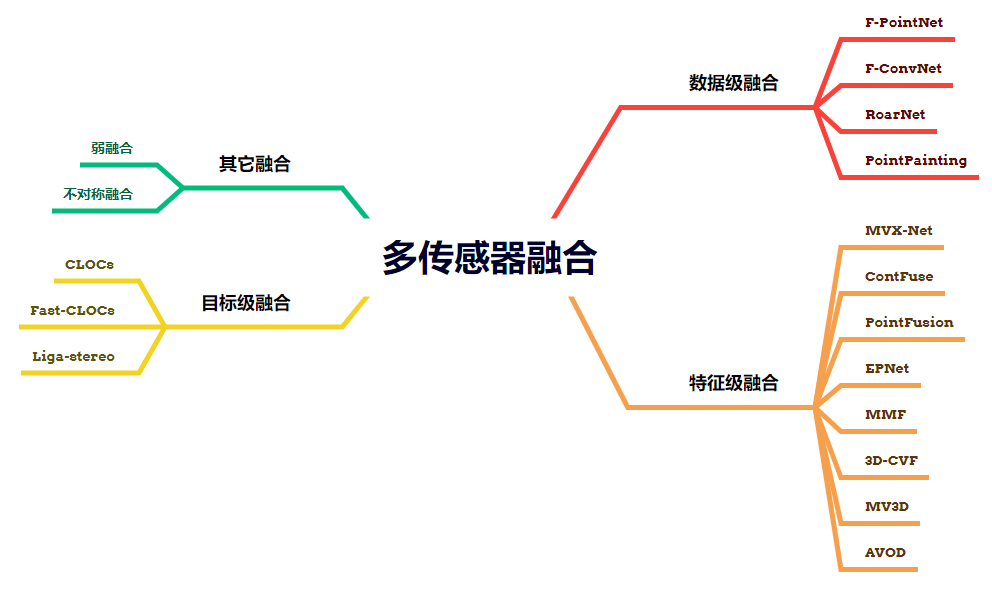
星球内部汇总了数据级融合、目标级融合、特征级融合、弱融合、不对称融合等多种方案!



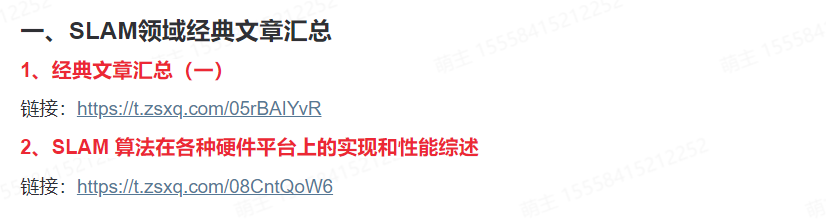
13.SLAM与高精地图
汇总了单目SLAM、RGB-D SLAM、激光SLAM、毫米波SLAM、高精地图定位方法、自定位方法!以及领域内最常用的高精地图制作方法!




14.模型压缩与轻量化
汇总了模型压缩、裁剪、量化、权值共享、模型加速、知识蒸馏、量化工具等数十篇干货介绍!
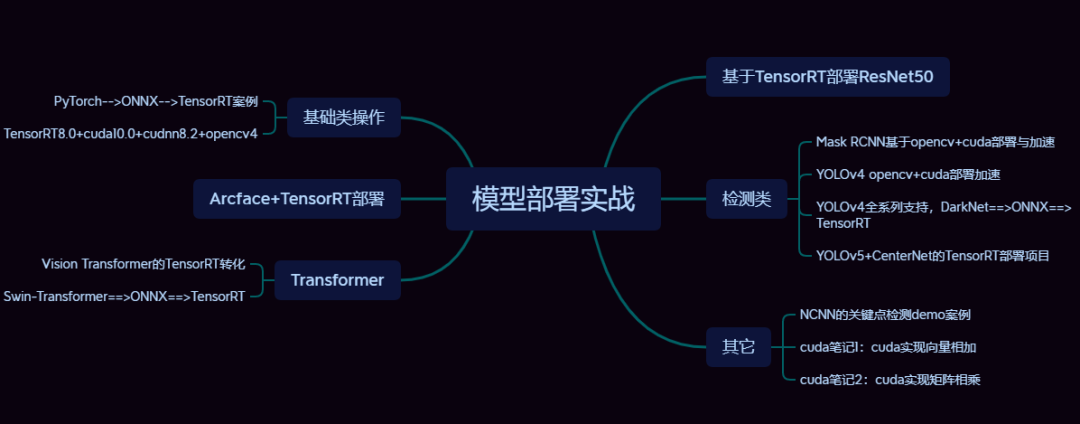
15.模型部署
TensorRT、NCNN、Opencv、MNN方案部署检测、分割、关键点、分类模型实战;
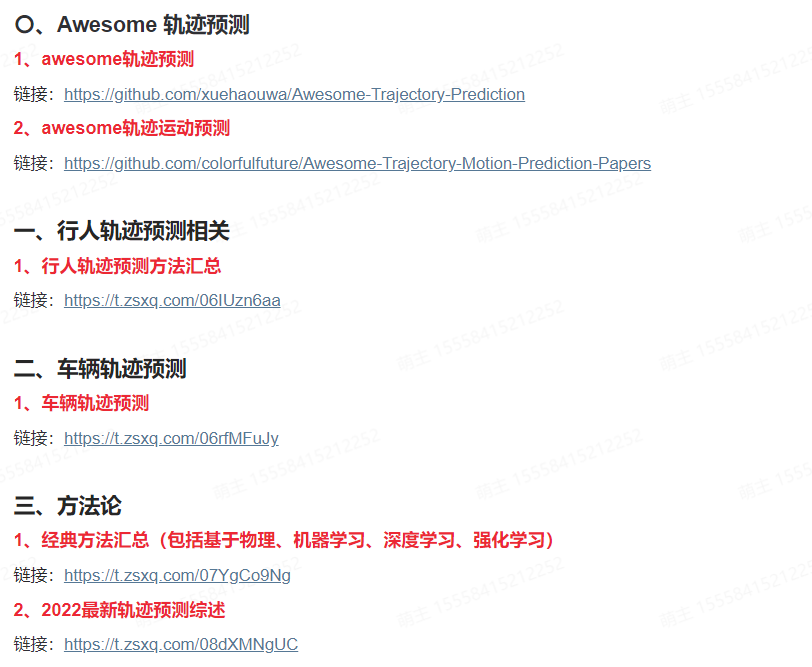
16.轨迹预测
重点关注行人、车辆、基于机器学习、深度学习、强化学习方式的预测!
17.规划控制
涵盖所有的规划控制方法,重点关注行车、泊车、机器人等应用领域!


18.其它
在感知定位融合之外,还汇总了Occupany network、测速测距、大量机器人、自动驾驶规划方法,强化学习在运动规划上的应用、V2X技术,以及图像加速CUDA方法等~
欢迎加入
欢迎大家扫码加入自动驾驶之心知识星球,我们诚邀前期成员的加入,一起创造一个全技术栈的自动驾驶开发者社区!星球成员的加入平均每天不到1元,欢迎扫码加入一起学习一起卷!

新人加入优惠券!
任何疑问欢迎联系汽车人助理,备注方向+昵称:


















 1643
1643

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









