



转眼又是一年开学季,回想当年的校园时光十分懵懂。一切都是听导师安排,没有去仔细思考未来做什么,长期的规划更是无从谈起,毕业后也是一点点从头学起。现在回想起来,当时如果多花些心思接触学术前沿,多去和不同的人交流,更重要的是如果知道自己需要学习什么,或许现状会更好~
特别是最近秋招期间,有很多小伙伴咨询汽车人该怎么准备秋招,需要准备哪些相关知识,有没有系统的学习路线,没有老师带该怎么进阶?总结起来就是不知道如何有效学习和如何有效规划。自动驾驶是一个很复杂庞大的系统,从零开始确实很难!好的教程很难做,口碑更难做,早期我们还是有点犹豫,因为大家一直坚持,要做就做最好的,绝不含糊,割韭菜的事情不干。半年以来我们已经输出近十门高质量课程,后续的课程也正在紧锣密鼓的进行中~~~
目前自动驾驶之心已经输出了多门比较高质量的课程,老师们不是手握顶会的科研大牛就是一线算法产品专家,真的能将一些痛点和前沿技术带给大家,也欢迎大家登录咱们的网站学习:www.zdjszx.com,开学季想给大家送一些福利,全场课程8.5折,如果您有需要,今天将会是最好的机会!
全场8.5折优惠券!开学卷起来!
课程主要涉及BEV感知、多模态3D检测、Transformer算法、单目3D感知、车道线检测、YOLO工业级目标检测、毫米波雷达视觉融合、多传感器标定、多传感器融合目标跟踪、CUDA加速与TensorRT模型部署、规划控制,还有一系列的大专栏配套课程,已经基本形成技术闭环。
BEV感知课程内容:纯视觉3D目标检测、多模态3D目标检测、多个实战讲解、完整清晰代码注释。
Transformer算法课程内容:2D/3D检测、分割、3D视觉、自动驾驶、视觉大模型、多个实战讲解、彻底搞懂Transformer。
多模态3D检测课程内容:前融合、特征融合、后融合、时序多模态3D检测,学术前沿+业界落地,一骑绝尘!
单目3D感知课程内容:单目2D检测、单目3D检测、单目BEV方案、单目Occupancy方案,主打的就是量产落地!
车道线检测课程内容:2D车道线检测、相机模型、BEV车道线检测、疑难场景优化,面向量产的全方位车道线检测理论与实战教程!
毫米波雷达视觉课程内容:基于滤波方案的后融合、基于深度学习的特征级融合、多个实战代码讲解、工业级+学术级方案。
YOLO系列课程内容:YOLOv3~YOLOv8、YOLOX等多个系列,图示网络结构与优化trick。
多传感器标定课程内容:Lidar/Camera/Radar/IMU近20+单传感器与多传感器标定方案,鱼眼相机标定等,技术非常密集。
多传感器融合目标跟踪:彻底搞懂卡尔曼滤波及其变种,面向业务。实战基于Camera/Lidar/Radar的目标跟踪。
CUDA与TensorRT部署课程内容:CUDA加速原理、TensorRT框架详解、CNN/Transformer/目标检测/BEVFusion四大基本模型部署实战。
规划控制课程内容:基础算法讲解、横纵解耦/横纵联合框架、Dijkstra、A*、RRT*、State Lattice Planner、QP路径优化和基于MPC的轨迹跟踪多个实战。
学习路线建议:感知全栈、多模态融合感知、感知全栈+部署、感知全栈+标定、感知全栈知+部署+标定、感知全栈+部署+标定+规划控制。
感知系列
1)BEV感知
BEV感知相当于给自动驾驶开启了“上帝视角”,能够让车辆无遮挡的“看清”道路上的实况信息,在BEV视角下统一完成感知和预测任务。当下不少的研究机构和各大车企都在推动BEV方案的落地,基于来自传感器输入层、基本任务和产品场景的不同组合,可以给出相应的BEV算法!主讲老师是我们非常欣赏的,手握多篇顶会,善于把复杂问题简单化!
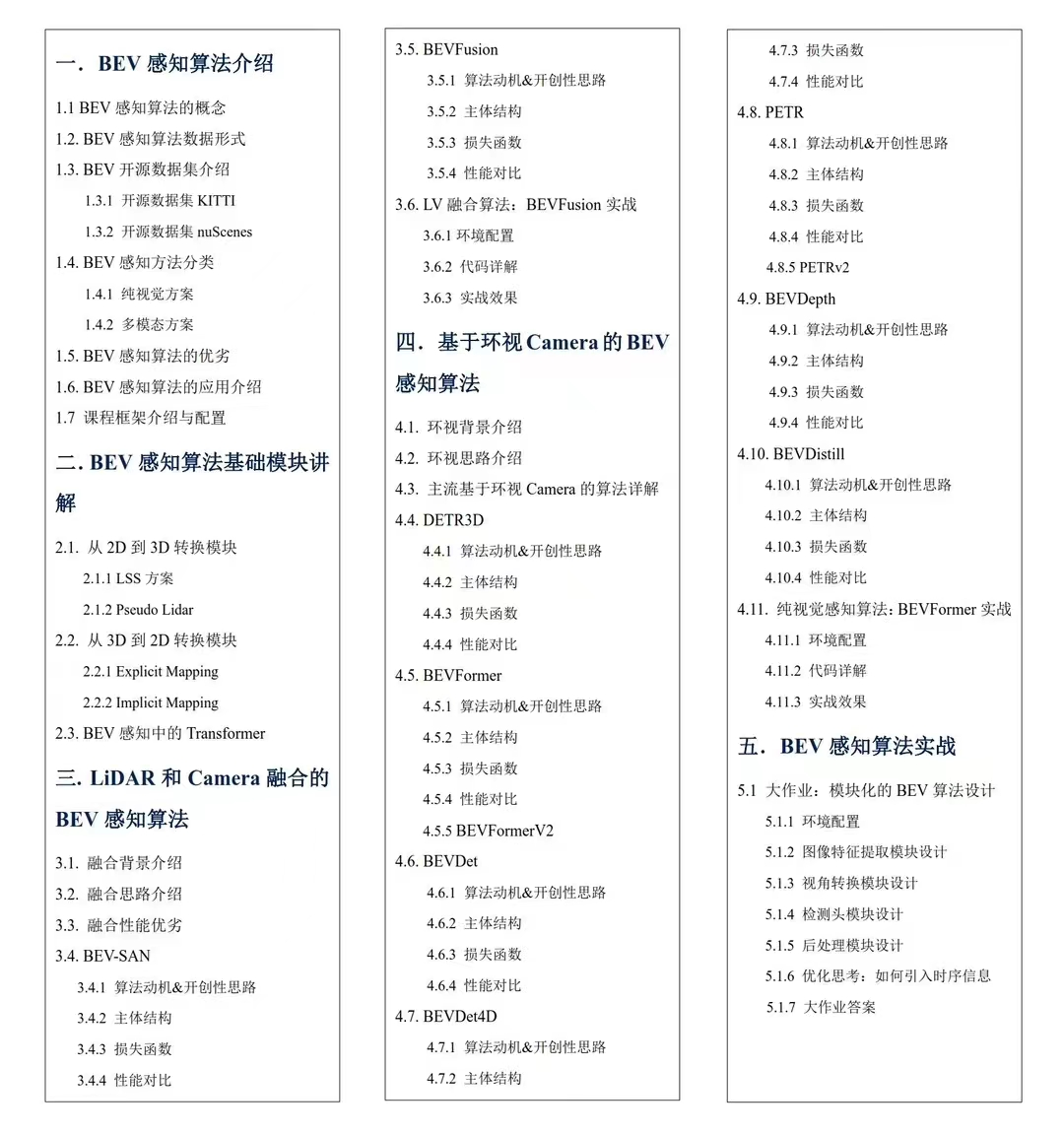
自动驾驶之心对这门课程的评价:学完能够对BEV感知的所有主流方案有着深入理解,在模型设计和优化上有较大提升;从根本上学会如何设计一个有效的BEV检测框架;能够精通自动驾驶通用算法,理论实践并重,无论是学术界抑或工业界都能直接复用;达到1年左右的自动驾驶工程师水平并且结识许多行业从业人员与学习合作伙伴!
2)Transformer算法
自动驾驶是高安全型应用,ViT是理想的选择。现在主流的自动驾驶感知算法基本都使用了ViT相关技术。另一方面,在自动驾驶或图像处理相关算法岗位的面试题中,ViT是必考题,需要对其理论知识有深入理解,并且在项目中真实的使用过相关技术。主讲老师是Top2 博士,学术界顶尖的研究员,目前已在CV顶会/顶刊发表相关论文近30篇。

自动驾驶之心对这门课程的评价:学完能从根本上对Transformer有一个透彻的理解。充分掌握Transformer在计算机视觉中的各种应用及未来趋势;能够精通Transformer的网络设计与理论思想,理论与实践并重,无论是学术界还是工业界均是刚需。更有面向下一代计算机视觉大模型的讲解与实战,未来找工作的同学千万不要错过!
3)多模态3D检测课程内容
多模态3D融合入门非常困难,在数据和算法层面的理解上难倒了一大帮人!许多同学在刚学习多模态感知算法的时候往往不知道如何下手,大多数人不清楚如何建立不同模态之间的关系,如何选择合适的融合方法以及如何实现高效的融合?我们选择了行业几乎所有主流多模态3D目标检测算法,其主要包括基于深度学习的前融合,深度特征融合以及后期结果融合三个层面。主讲老师是国内首批研究多模态3D检测的技术专家,深耕自动驾驶算法领域多年。
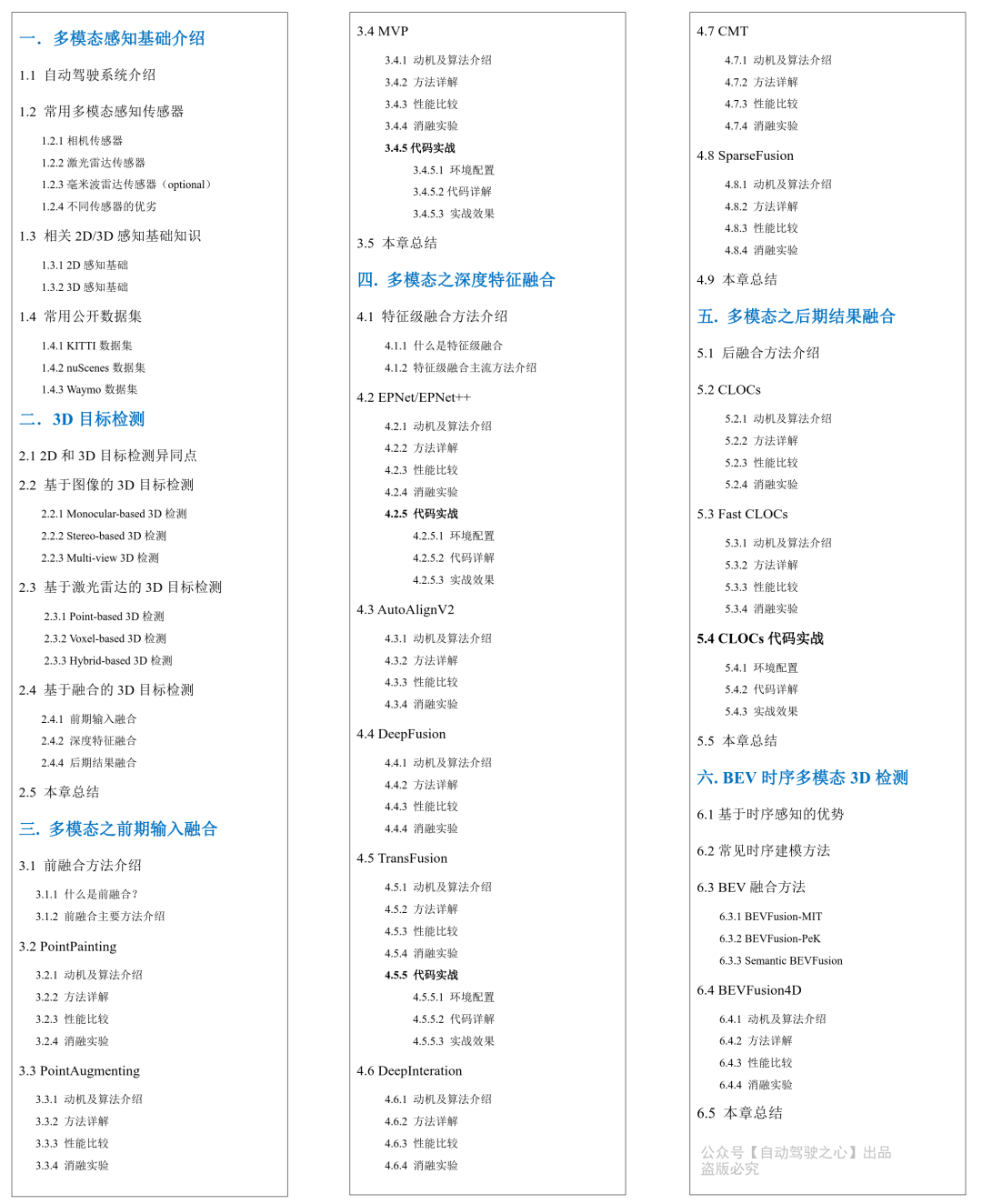
自动驾驶之心对这门课程的评价:随着自动驾驶算力提升和硬件成本下降,多模态融合必将是未来的主流趋势。学完这门课程能完全掌握多模态融合的精髓;充分理解各个传感器的优劣势以及应用场景;从根本上学会如何设计一个有效的多模态融合的3D目标检测框架。学完本课程能够达到1~2年左右自动驾驶融合感知工程师水平!
4)单目3D感知
纯视觉的3D感知输入一般是单目图像或多目图像,只需要安装摄像头,标定相对简单,适合大规模的商业部署。当前视觉3D检测的发展路径是:2D车轮检测+地平假设->单目3D检测->BEV检测和occupancy检测。整个pipeline涉及的内容较多,时间线较长,即使是已经有工作年限的同学,也很少能够完整的走一遍,更别说未有工作经验的同学。为此,我们自研了一套同时面向工程界和学术界的教程,针对目前常用的大模型自动标注、点云模型蒸馏视觉3D模型、CaDDN+BEVDet单目BEV方案、PETR单目BEV方案、单目Occupancy方案OccupancyM3D等展开详细介绍!
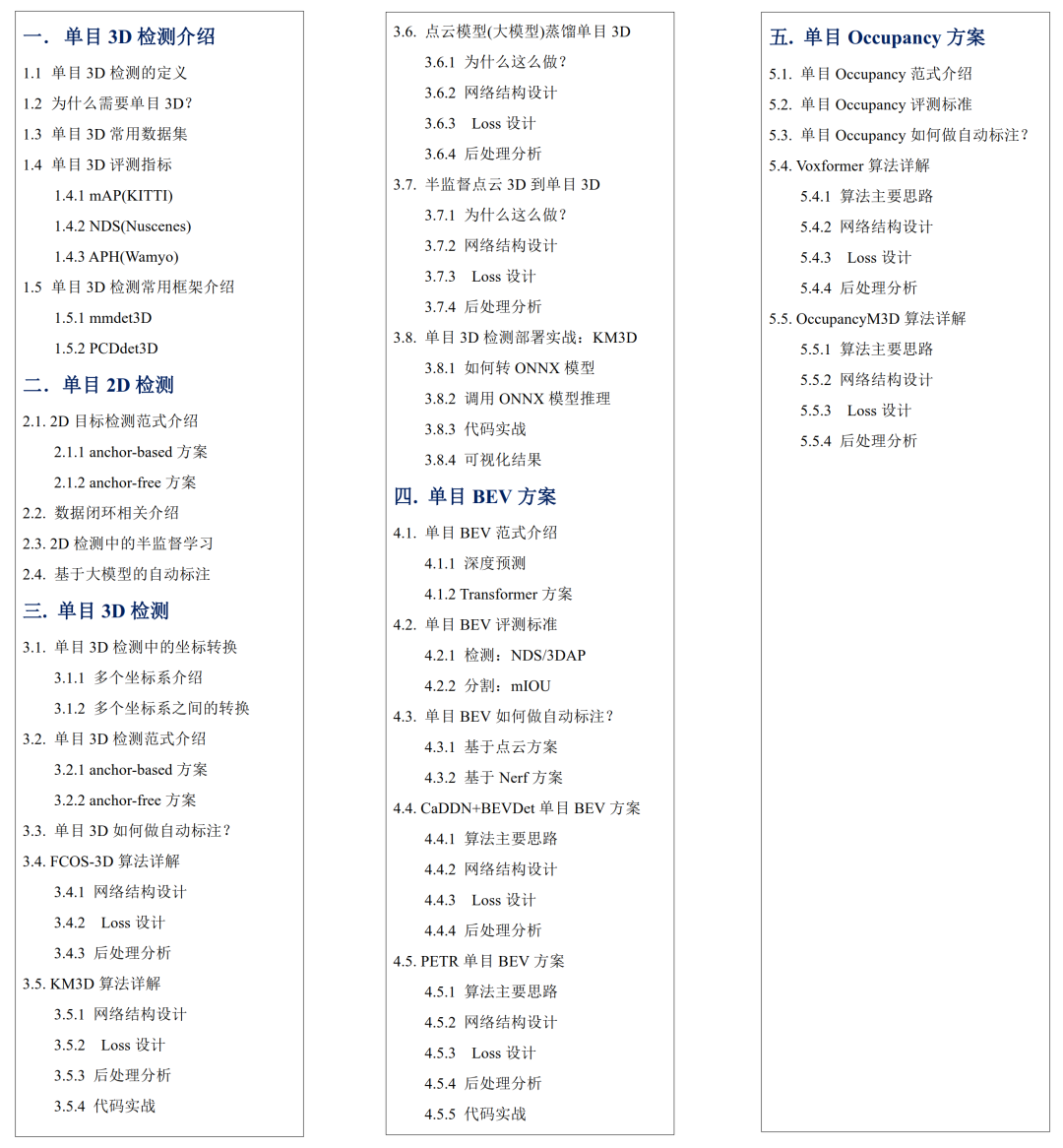
自动驾驶之心对这门课程的评价:这门课程能够真正能够带大家从0到1梳理清楚视觉3D方案的路线及核心内容点,最适合工作上需要进阶的同学以及刚入门的小白!主讲老师曾在KITTI和Nuscenes上获得3D检测任务第一名,可以说对于单目3D感知有着非常深入的理解。学完本门课程能对量产级的单目3D方案有着透彻的理解;能熟悉自动驾驶感知算法与方案的发展路线,从更高的角度上看待整个行业;课程精通自动驾驶通用算法,理论实践并重,无论是学术界抑或工业界都能直接复用;学完本课程能够达到1年左右的视觉3D感知算法工程师的水平!
5)车道线检测
车道线检测任务由来已久,从最初的基于霍夫变换到现在基于2D图像的分割、分类、Anchor-based等,再到最近大火的BEV车道线以及局部建图,是一个技术栈丰富、方案多、难度大的自动驾驶核心任务。在深入调研后,我们选择了面向量产的全方位车道线检测理论与实战教程!特别适合刚入门的小白以及需要在业务上从事自动驾驶感知、建图、预测规划的同学,也很适合想要系统地了解新方向的其他方向从业人员。
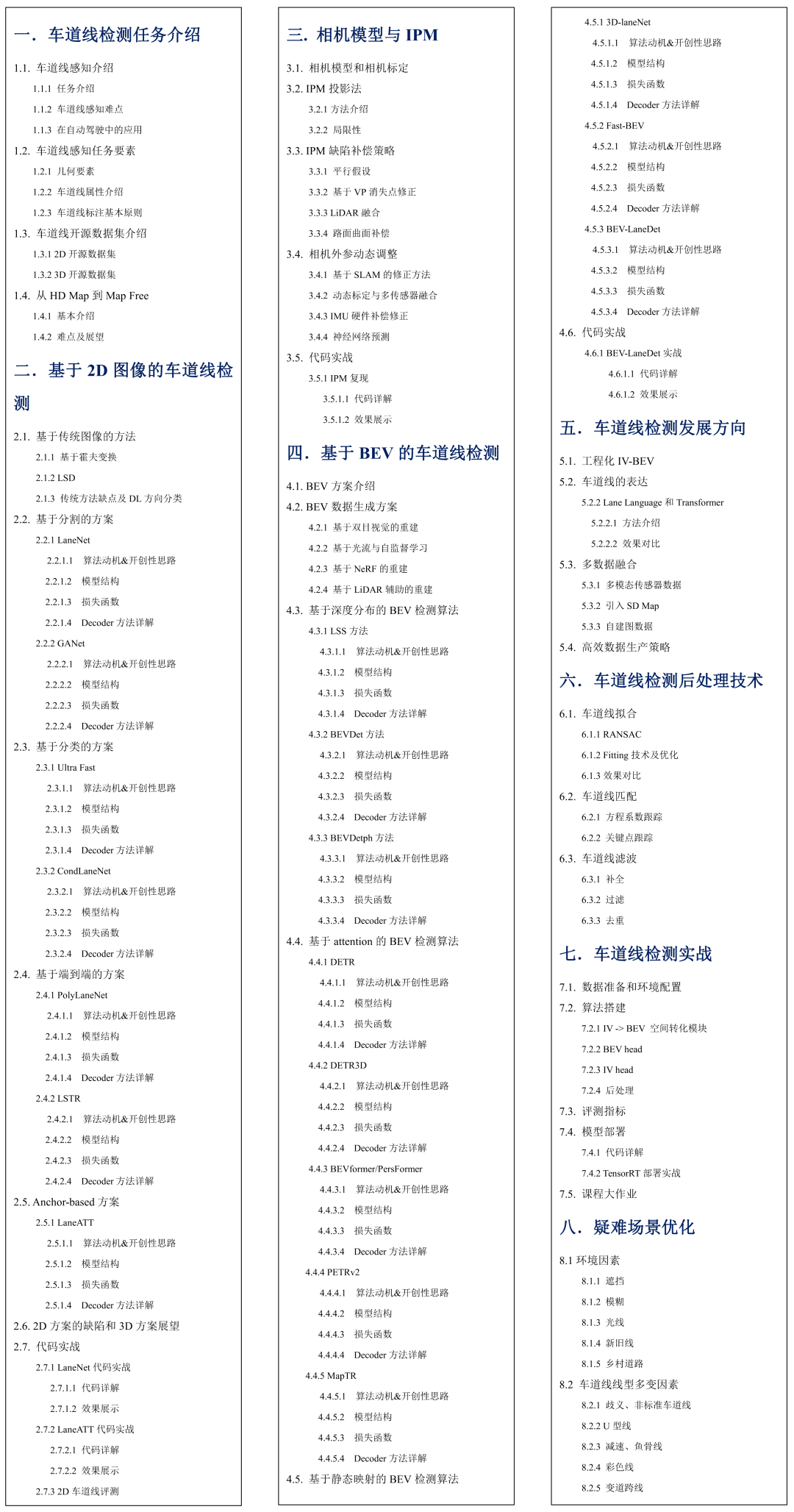
自动驾驶之心对这门课程的评价:车道线作为最基础的自动驾驶感知任务,一直都是学术界和工业界发力的重点。尤其是近两年轻地图/无地图感知需求的出现,车道线检测焕发了第二春。学完这门课程你能够彻底掌握2D车道线检测和基于BEV的车道线检测的精髓,充分理解车道线检测落地的真正难点。学完本课程能够达到1~2年左右自动驾驶融合感知工程师水平!
6)毫米波雷达视觉融合
毫米波雷达和相机融合是传感器融合方案中非常受欢迎的方法,也是目前落地最多的方案!相机很容易受到光照不足或恶劣天气条件的影响,仅用相机检测三维物体无法提供准确的距离信息。毫米波雷达可以提供精确的距离信息、速度信息以及其它信息并且可以全天候地运行。
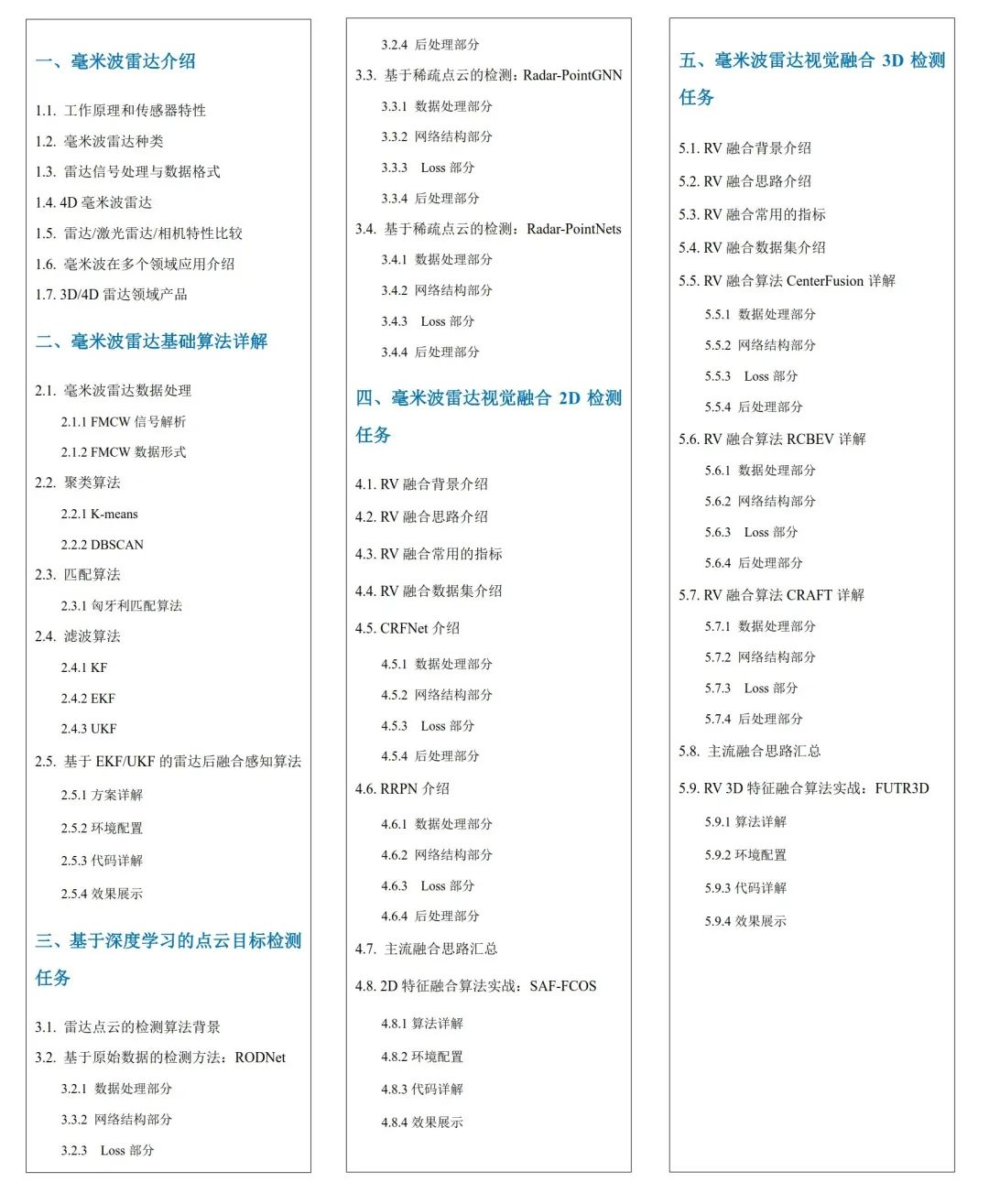
自动驾驶之心对这门课程的评价:能够直接面向现有最主流的多传感器融合落地方案,学后能够对传统毫米波算法及数据处理有着深入了解;熟练掌握常用毫米波雷达深度学习方法;对毫米波视觉2D融合和3D融合方案有着较深了解,熟悉设计方法与思路;对多传感器融合任务有深入了解,能够掌握工业界常用设计方法,搭建自己的工程;
7)YOLO工业级系列教程
目标检测技术在自动驾驶、智能交通等多个领域属于刚需,速度快、性能高、效果稳定、能打耐用是其基本要求,而YOLO则无疑满足了所有要求,被工业和行业研究大规模应用,YOLOv3~YOLOv8系列模型基本成为了标配!讲师在PPT制作,代码制作上非常细心,适合小白入门和算法优化进阶。
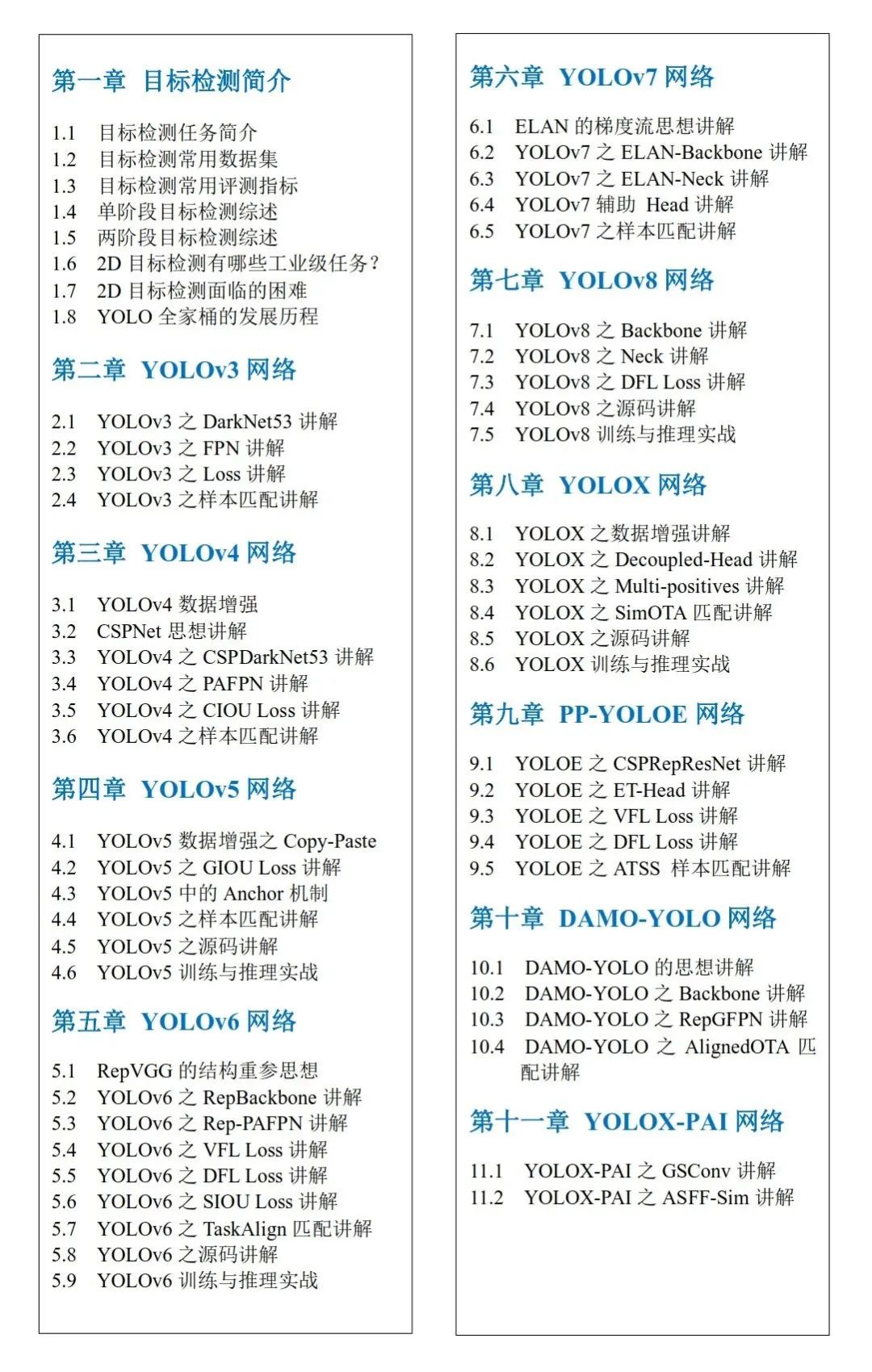
自动驾驶之心对这门课程的评价:学完能够具备扎实的目标检测算法基础,在网络结构设计、损失函数、采样、后处理、评测方法等模块上有较大提升!真正学习到YOLO设计思想,从根本上学会如何设计一个有效的检测网络;能够精通YOLO全系列算法,理论实践并重,无论是学术界抑或工业界都能直接复用;收获目标检测任务中的各类trick,学完本课程能够达到1年左右的算法工程师水平;能够结识许多行业从业人员与学习合作伙伴!
多传感器融合目标跟踪
在自动驾驶感知的整个过程中,通过算法获取动态障碍物的位置信息后,下游模块如预测、规控并不能直接使用感知输出的单帧结果,因此需要通过目标跟踪获取目标连续帧的轨迹信息。而基于贝叶斯滤波的融合跟踪技术,已经成为工业界实现多传感器融合感知的主流方案。主讲老师Edison,Top2本硕,在定位、感知等方向有5年多的工作经验,负责感知融合方向,在算法研究和工程落地方面有着丰富的经验。
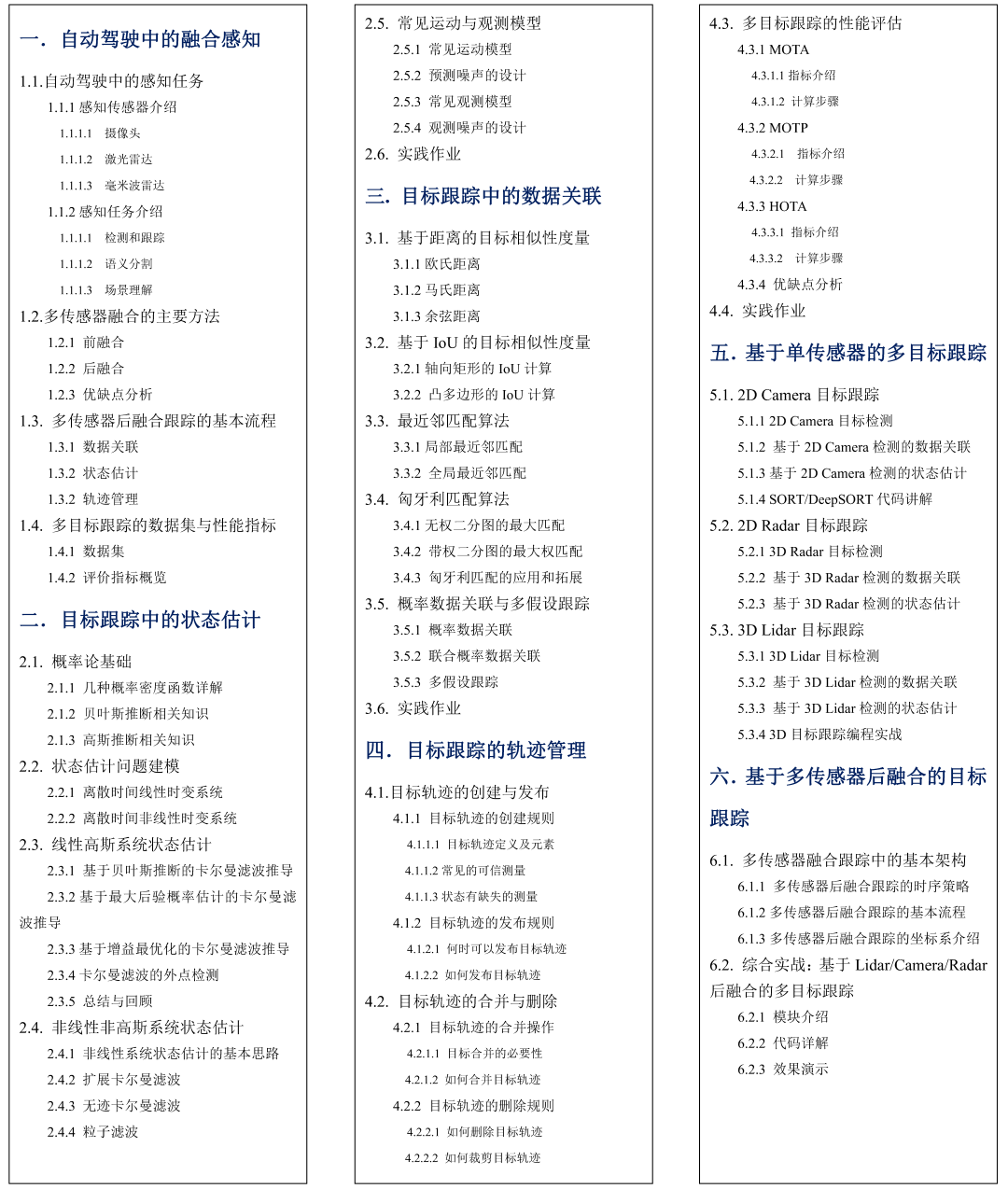
自动驾驶之心对这门课程的评价:学完能够具备扎实的卡尔曼滤波理论和代码基础,对多传感器融合和目标跟踪都能有透彻的理解!从整体和细节上掌握目标跟踪的数据关联和轨迹管理。课程的理论与实践并重,无论是单传感器跟踪或多传感器融合均能熟练掌握。并且课程知识可以很容易迁移至机器人领域。学完本课程能够达到1年左右的算法工程师水平;能够结识许多行业从业人员与学习合作伙伴!
多传感标定系列
传感器是自动驾驶系统能够感知周围环境的决定性因素,它们是自动驾驶系统能够准确定位的前提。正确的传感器标定对于自动驾驶系统运行是至关重要的,它既可以为后续的建图、定位、感知和控制打下坚实的基础,也可以影响车辆的行驶状态!
课程包含了在线标定+离线标定近20+种方案,在相机内参标定、标定精度优化、传感器到车体标定、Lidar/Radar/IMU/Camera多传感器之间离线标定/在线标定、鱼眼与环视相机标定等20+标定算法展开了详细讲解与代码实现,适合感知、标定等算法工程人员从0到1的学习!
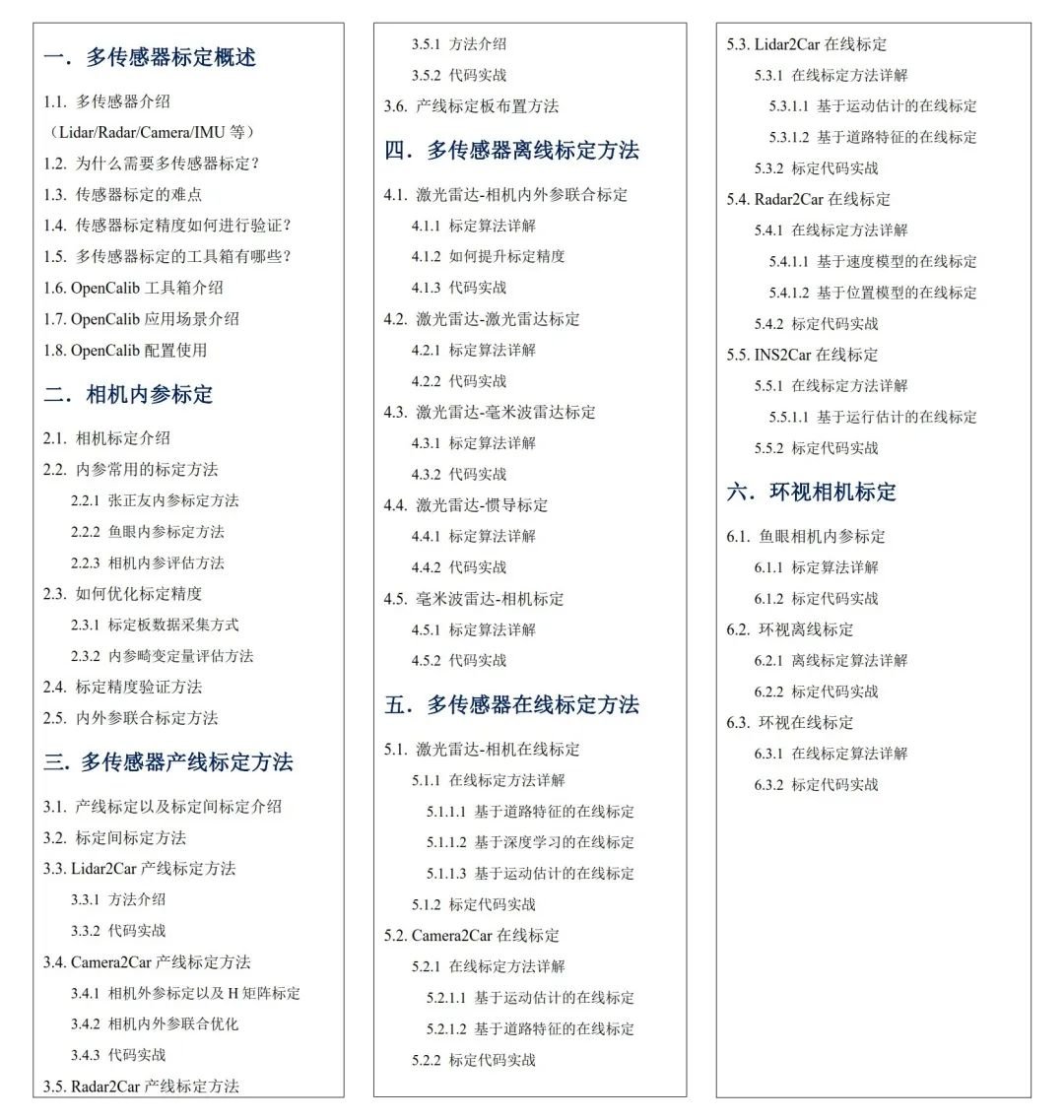
自动驾驶之心对这门课程的评价:技术非常密集、方案非常多、适合算法工程人员与在校研究人员,可拓展性很强,学后能够对多传感器标定所有主流方案有着深入理解,在产线、离线、在线标定中精度能达到量产级别;学习到自动驾驶多传感器标定的算法,从根本上学会如何进行手动和自动标定;能够精通常用多传感器标定算法,理论实践并重,无论是学术界抑或工业界都能直接复用;学完本课程能够达到2年左右的自动驾驶标定工程师水平并结识许多行业从业人员与学习合作伙伴!
模型部署与加速系列
这是一门非常值得推荐的课程,适用所有做模型的同学!课程从最基础的并行处理与GPU体系架构开始,进而到CUDA与cuDNN入门,编写自己第一个CUDA程序,再到TensorRT基础入门和API 使用,实战涉及分类器部署(CNN+Transformer)、YOLO系列检测器部署,更有重磅的BEVFusion模型部署的详细讲解,满满的干货。
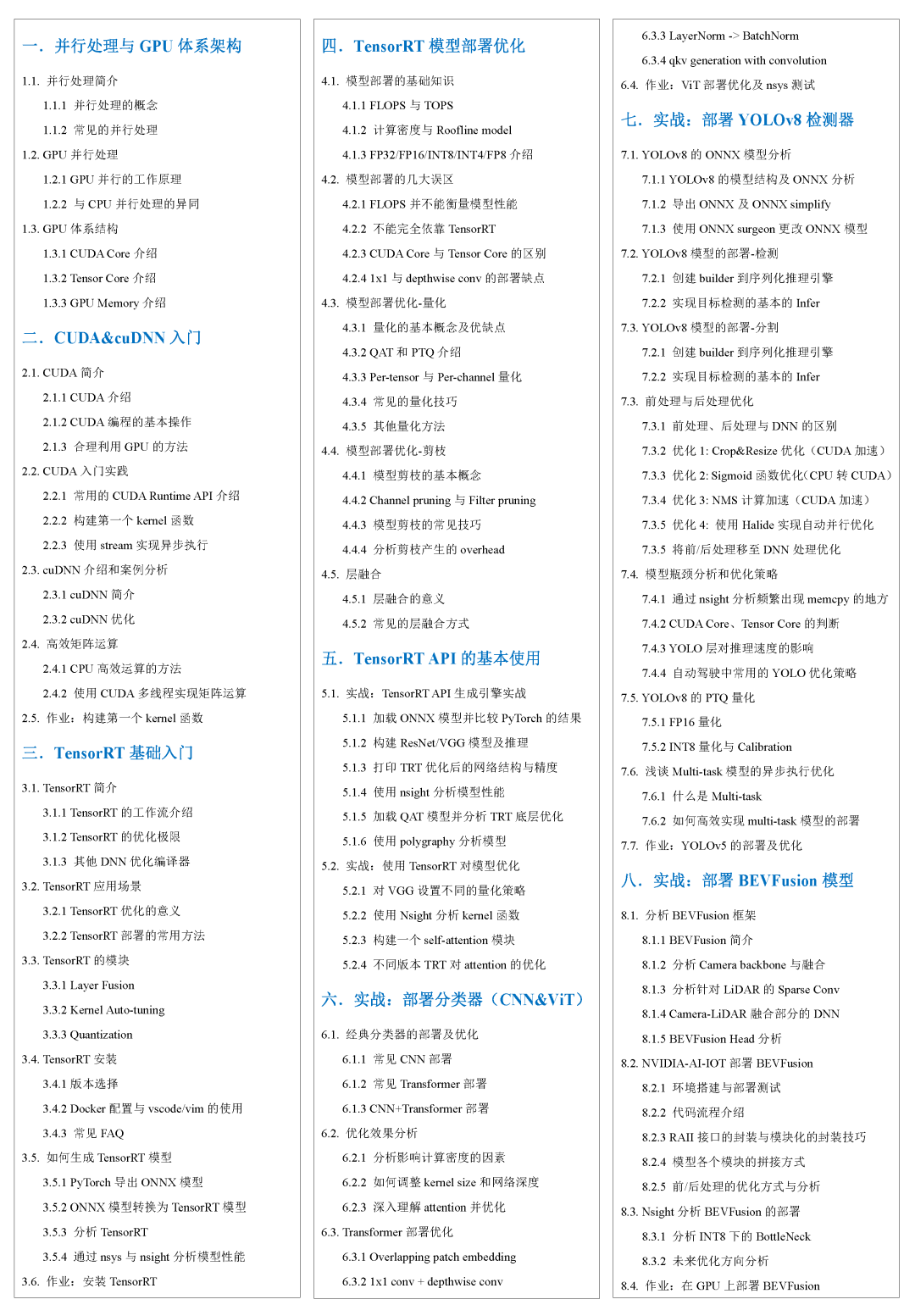
自动驾驶之心对这门课程的评价:学后能够对TensorRT模型部署有着深入理解,在模型部署和优化上有较大提升;掌握分类、检测及BEV感知的模型部署与优化,深入理解部署优化的痛点和难点;学完本课程能够达到1年左右的模型部署工程师水平;
规划控制系列
规划控制作为整个自动驾驶/机器人算法流程中最下游的模块,直接决定着自动驾驶的安全性及舒适度。规划控制相比于感知对理论知识的要求较高。目前企业界的主流规控算法包括PID, LQR, MPC等控制算法,以及A*,Dijkstra,有限状态机,Markov决策, Lattice planner等等规划算法。这段时间,有很多小伙伴咨询规划控制的相关问题,其实我们对规划控制也很感兴趣,市面上已有的规划控制相关学习资料质量参差不齐,许多同学在资料搜集和入门学习的时候踩了较多坑,我们认真调研后,出品了一门非常具有干货的课程,帮助大家快速学习!
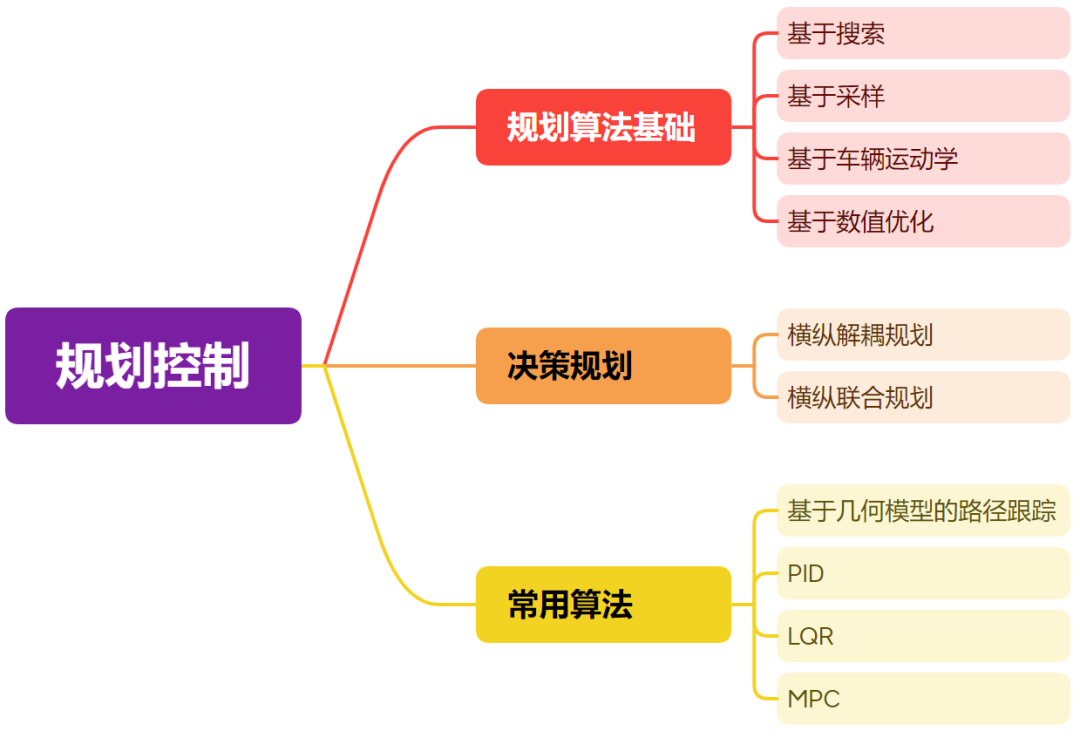
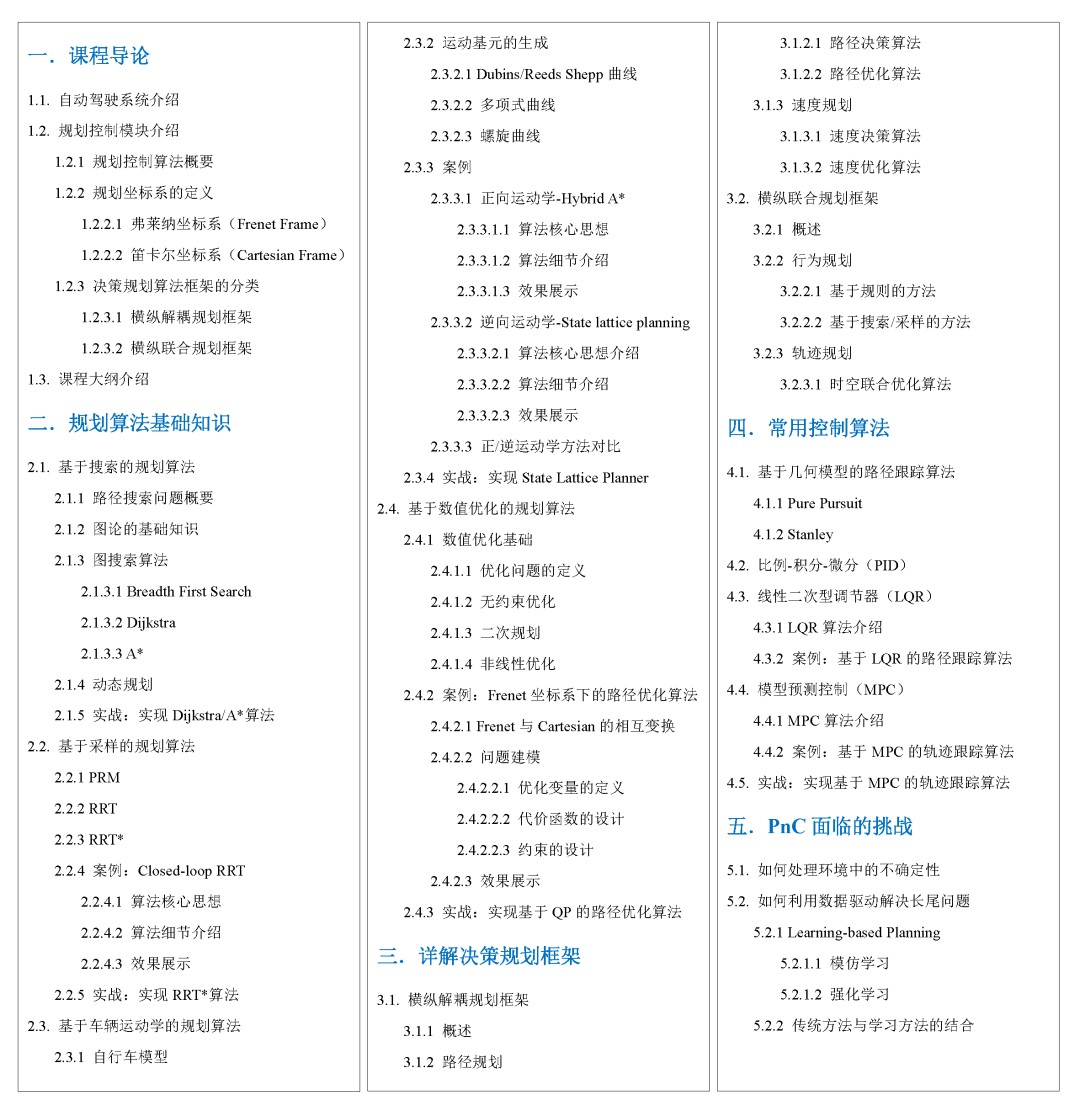
自动驾驶之心对这门课程的评价:从最基础的规划控制模块概要、定义开始,进而到规划算法基础知识的讲解,涉及基于搜索/采样/车辆运动学/数值优化的相关规划算法,再到决策规划框架的讲解(横纵解耦、横纵联合)、最后讲解了常用的几种控制算法(PID、LQR、MPC)并探讨了PnC面临的挑战,实战涉及Dijkstra、A*、RRT*、State Lattice Planner、QP路径优化和基于MPC的轨迹跟踪算法。
学习路线建议
感知全栈:包括BEV感知、Transformer算法、单目3D感知、车道线检测算法、毫米波雷达视觉融合、多传感器目标跟踪、2D目标检测、多模态融合3D目标检测;
多模态融合感知:包括BEV感知、毫米波雷达视觉融合、多传感器目标跟踪、多模态融合3D目标检测;
感知全栈+部署:包括BEV感知、Transformer算法、单目3D感知、车道线检测算法、毫米波雷达视觉融合、多传感器目标跟踪、2D目标检测、多模态融合3D目标检测、CUDA加速与Tensort模型部署;
感知全栈+标定:包括传感器标定(Lidar+Camera+Radar+IMU)、BEV感知、Transformer算法、单目3D感知、车道线检测算法、毫米波雷达视觉融合、多传感器目标跟踪、2D目标检测、多模态融合3D目标检测;
感知全栈+部署+标定:包括传感器标定(Lidar+Camera+Radar+IMU)、BEV感知、Transformer算法、单目3D感知、车道线检测算法、毫米波雷达视觉融合、多传感器目标跟踪、2D目标检测、多模态融合3D目标检测、CUDA加速与Tensort模型部署;
感知全栈+部署+标定+规划控制:包括传感器标定(Lidar+Camera+Radar+IMU)、BEV感知、Transformer算法、单目3D感知、车道线检测算法、毫米波雷达视觉融合、多传感器目标跟踪、2D目标检测、多模态融合3D目标检测、CUDA加速与Tensort模型部署、规划控制;
课程咨询
8.5折优惠券
扫码添加助理咨询课程!
微信1:AIDriver004
微信2:AIDriver003

















 292
292

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









