 视觉与激光雷达地图定位方法综述
视觉与激光雷达地图定位方法综述





 本文详细探讨了基于相机和激光雷达的视觉地图定位技术,包括位置识别和度量地图定位两个阶段。位置识别通过比较传感器输出与预构建地图找到初始位置,而度量地图定位则关注在车辆移动时的精确跟踪。激光雷达方法常使用点云配准提高定位精度,而相机方法则依赖于深度学习和特征匹配克服视点差异。同时,跨模态方法利用不同传感器数据在单一地图中进行定位。论文汇总了各种方法的优缺点,并提供了相关数据集和性能评估。
本文详细探讨了基于相机和激光雷达的视觉地图定位技术,包括位置识别和度量地图定位两个阶段。位置识别通过比较传感器输出与预构建地图找到初始位置,而度量地图定位则关注在车辆移动时的精确跟踪。激光雷达方法常使用点云配准提高定位精度,而相机方法则依赖于深度学习和特征匹配克服视点差异。同时,跨模态方法利用不同传感器数据在单一地图中进行定位。论文汇总了各种方法的优缺点,并提供了相关数据集和性能评估。
点击下方卡片,关注“自动驾驶之心”公众号
ADAS巨卷干货,即可获取
点击进入→自动驾驶之心技术交流群
后台回复【高精地图综述】获取论文!
后台回复【领域综述】获取自动驾驶全栈近80篇综述论文!
后台回复【数据集下载】获取计算机视觉近30种数据集!
1论文主要关注
由于camera或激光雷达等传感器返回足够丰富的数据,researcher能够用不同的分辨率绘制不同类型的地图并使用它们在城市环境中实现高水平的车辆定位精度和稳定性。与现有SLAM方法相反,视觉地图定位依赖于预先构建的地图,仅关注通过避免误差累积或漂移来提高定位精度。一般将视觉地图定位定义为一个两阶段的过程,在位置识别阶段,通过将视觉传感器输出结果与一组已标记的感兴趣地图区域进行比较,确定车辆在地图中的初始位置。随后,在地图度量定位阶段,通过不断将视觉传感器的输出与正在穿越的地图当前区域对齐,跟踪车辆在地图上移动。论文汇总并讨论了两个阶段的基于激光雷达、基于相机和跨模态视觉地图定位的最新方法,以突出每种方法的优缺点。
2应用背景
多年来定位一直在探索阶段,大部分时间都与建图结合在一起,最终产生了两种截然不同的思想流派:第一种传统上称为同时定位和建图(SLAM),其中定位和建图在一个循环中同时执行,使得每一部分都可以利用另一部分的结果;第二种方法通过离线进行建图,并使用这些结果实现精确定位,从而将定位和建图解耦。
虽然SLAM被视为部署时间方面的最佳解决方案,此类系统所达到的精度不足以满足在城市环境中部署自动驾驶汽车所需的安全条件,因为它们有时会受到漂移的影响。除此之外,障碍物检测和跟踪方法仍在努力实现可信赖的一致结果,尤其是在出现遮挡或亮度突然变化等问题时,这使得通常有必要使用预先构建的地图作为参考,并最终检测相关环境信息,如交通灯和交通标志。
地图定位通常可分为两个主要步骤。首先,车辆必须在地图上找到其初始位置,特别是当没有其他传感器(如GPS)可提供初始区域时。这种情况下的解决方案是使用视觉位置识别方法,仅使用视觉传感器的输入和中间表示,可以在预构建的地图中找到最佳匹配。一旦找到初始位置,车辆可以开始在地图上导航,同时尽可能精确地跟踪其移动,称之为地图度量定位,该定位是通过在输入传感器提供的后续帧之间实施时间一致性以及空间一致性来实现的,空间一致性通过与地图的感兴趣区域匹配来保证,并且可以被视为对仅使用传感器输入计算的第一变换的校正。第二步以循环方式运行,只要定位误差保持在合理水平,保证传感器输出和地图感兴趣区域之间有足够的重叠。下图显示出了表示上述两个主要步骤中每个步骤所涉及的不同过程的框图:
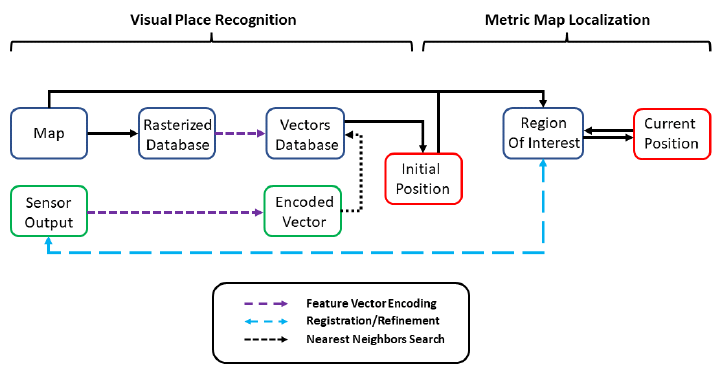
论文讨论了所有主要的视觉位置识别(Camera+Lidar)和metric map 定位方法,包括激光雷达传感器和camera。介绍并讨论每一个方案的优缺点。除此之外,还考虑了基于“跨模态”的定位情况,但与基于“传感器融合”的方法进行了明确区分:跨模态方法使用一个传感器输出,并尝试在使用不同模态传感器构建的地图中对其进行定位。另一方面,传感器融合方法使用来自两种模式的传感器输入,而不考虑地图类型。传感器融合方法和无地图定位方法已在[16]、[20]、[73]中叙述,因此在本论文中不再讨论,只关注单传感器、单地图定位方法。
3任务介绍
大多数视觉地图定位方法(基于Camera和Lidar)包括两个主要步骤:位置识别,找到地图中的初始位置,然后是metric map定位,以在车辆在地图中移动时跟踪车辆。
Visual Place Recognition
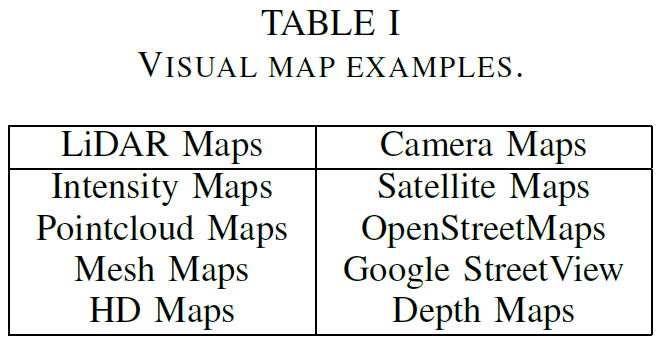
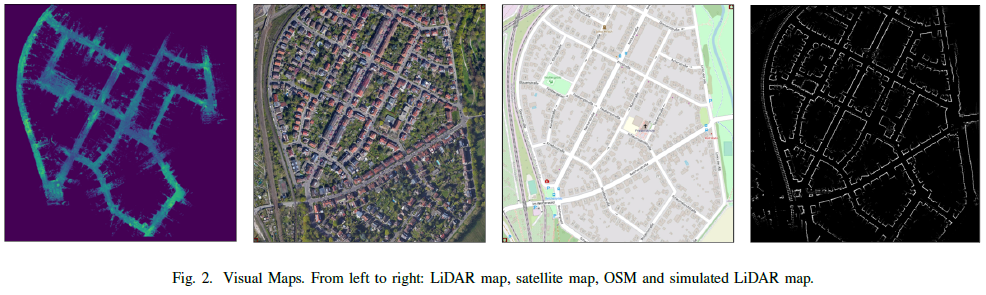
位置识别代表着在预先构建的数据库中尽可能高效地找到输入传感器数据对应的的最佳匹配位置,上图显示了几种常见的基于Lidar和Camera的高精地图。下图显示了同一组预构建地图,但使用不同方法,首先是激光雷达地图,使用连续的激光雷达点云构建,这些点云使用配准方法对齐,并使用在线束平差进行微调。接下来是卫星地图,使用卫星图像和GPS测量构建,然后是OpenStreetMap(OSM),通过在卫星地图上跟踪相关对象构建。最后,通过将光线投射应用于建筑物分段,构建了模拟的二维激光雷达地图。
位置识别通常采用不同的方法,具体取决于所使用的传感器:当使用camera查找初始位置时,所使用的地图通常是top-view 2D map的变体,例如基于卫星的地图。虽然这些地图往往大小有限,因此易于光栅化和查询,但它们确实带来了另一个挑战,即cross-view方面:地图是
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1058
1058



 到【灌水乐园】发言
到【灌水乐园】发言








