自动驾驶学习笔记(二十)——Planning算法
最新推荐文章于 2025-01-04 14:51:54 发布





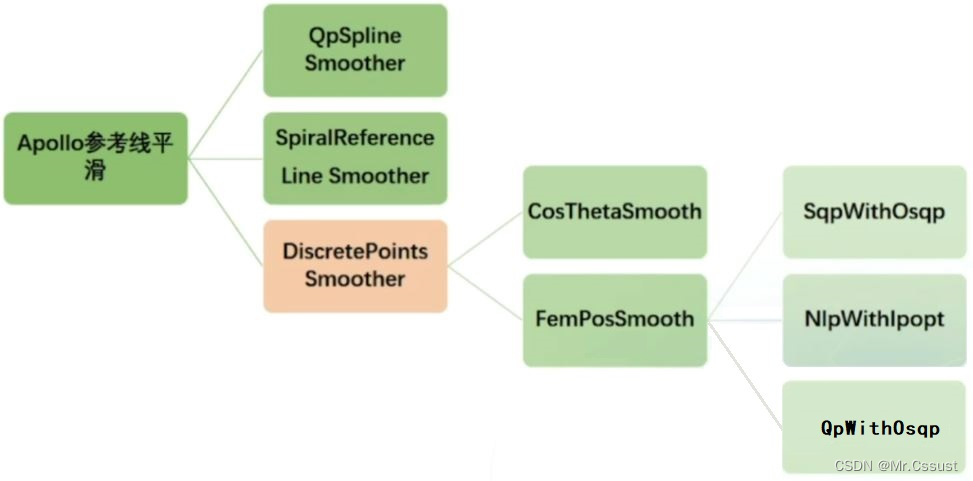
 本文介绍了自动驾驶Planning模块中的关键算法,包括参考线平滑、双层状态机结构、EM Planner和Lattice Planner的工作原理。EM Planner基于最大期望算法进行路径规划,而Lattice Planner则采用采样方法生成无碰撞的局部轨迹。文章还提到了算法的调试方法,如实车运行和仿真运行。
本文介绍了自动驾驶Planning模块中的关键算法,包括参考线平滑、双层状态机结构、EM Planner和Lattice Planner的工作原理。EM Planner基于最大期望算法进行路径规划,而Lattice Planner则采用采样方法生成无碰撞的局部轨迹。文章还提到了算法的调试方法,如实车运行和仿真运行。
本文介绍了自动驾驶Planning模块中的关键算法,包括参考线平滑、双层状态机结构、EM Planner和Lattice Planner的工作原理。EM Planner基于最大期望算法进行路径规划,而Lattice Planner则采用采样方法生成无碰撞的局部轨迹。文章还提到了算法的调试方法,如实车运行和仿真运行。
本文介绍了自动驾驶Planning模块中的关键算法,包括参考线平滑、双层状态机结构、EM Planner和Lattice Planner的工作原理。EM Planner基于最大期望算法进行路径规划,而Lattice Planner则采用采样方法生成无碰撞的局部轨迹。文章还提到了算法的调试方法,如实车运行和仿真运行。
 856
856

 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


























 到【灌水乐园】发言
到【灌水乐园】发言








