




pendulum-v0环境
>>> from gym import envs
>>> print(envs.registry.all())

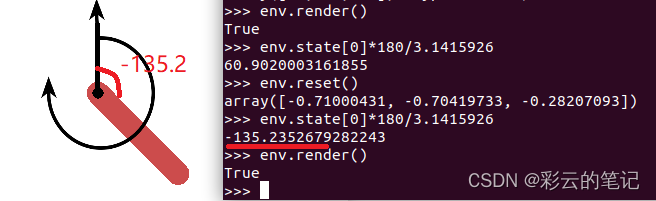
state: theta, thetadot thetadot 是啥?
observation : np.cos(theta), np.sin(theta), thetadot
theta是角度。
thetadot 是角速度。
 本文介绍了pendulum-v0环境的细节,包括状态(state)和观察(observation)的具体内容。状态由角度(theta)和角速度(thetadot)组成;观察则通过cos(theta)、sin(theta)及thetadot来表示。这些参数对于理解pendulum-v0环境至关重要。
本文介绍了pendulum-v0环境的细节,包括状态(state)和观察(observation)的具体内容。状态由角度(theta)和角速度(thetadot)组成;观察则通过cos(theta)、sin(theta)及thetadot来表示。这些参数对于理解pendulum-v0环境至关重要。
>>> from gym import envs
>>> print(envs.registry.all())
state: theta, thetadot thetadot 是啥?
observation : np.cos(theta), np.sin(theta), thetadot
theta是角度。
thetadot 是角速度。
 870
753
870
753

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























