




 本教程介绍了一种使用OpenMV Cam和MAVLink协议实现无人机AprilTag精准降落的技术方案。通过摄像头捕捉并解析AprilTag信息,将数据传送给ArduPilot/PixHawk飞行控制器,实现稳定且精确的着陆过程。
本教程介绍了一种使用OpenMV Cam和MAVLink协议实现无人机AprilTag精准降落的技术方案。通过摄像头捕捉并解析AprilTag信息,将数据传送给ArduPilot/PixHawk飞行控制器,实现稳定且精确的着陆过程。
https://book.openmv.cc/example/18-MAVLink/mavlink-apriltags-landing-target.html
https://mavlink.io/en/messages/common.html#mav_commands
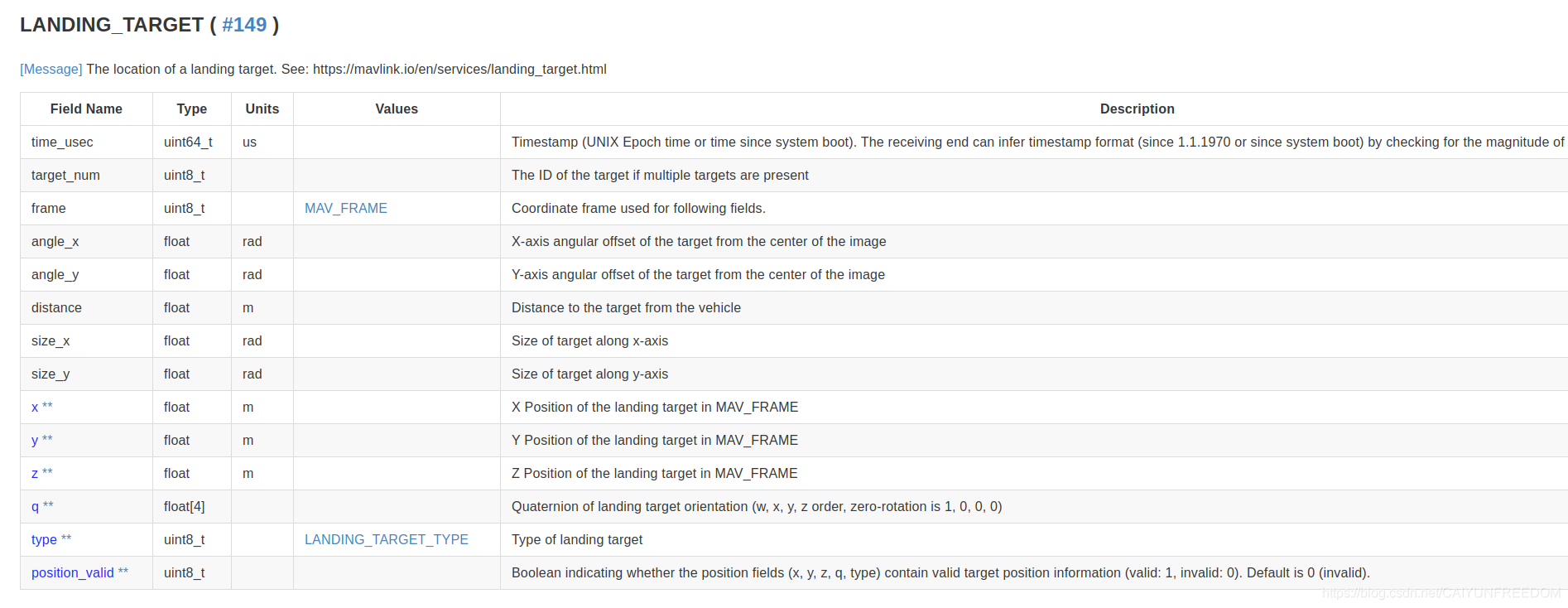
https://mavlink.io/en/messages/common.html#LANDING_TARGET
https://ardupilot.org/copter/docs/parameters.html#frame-class
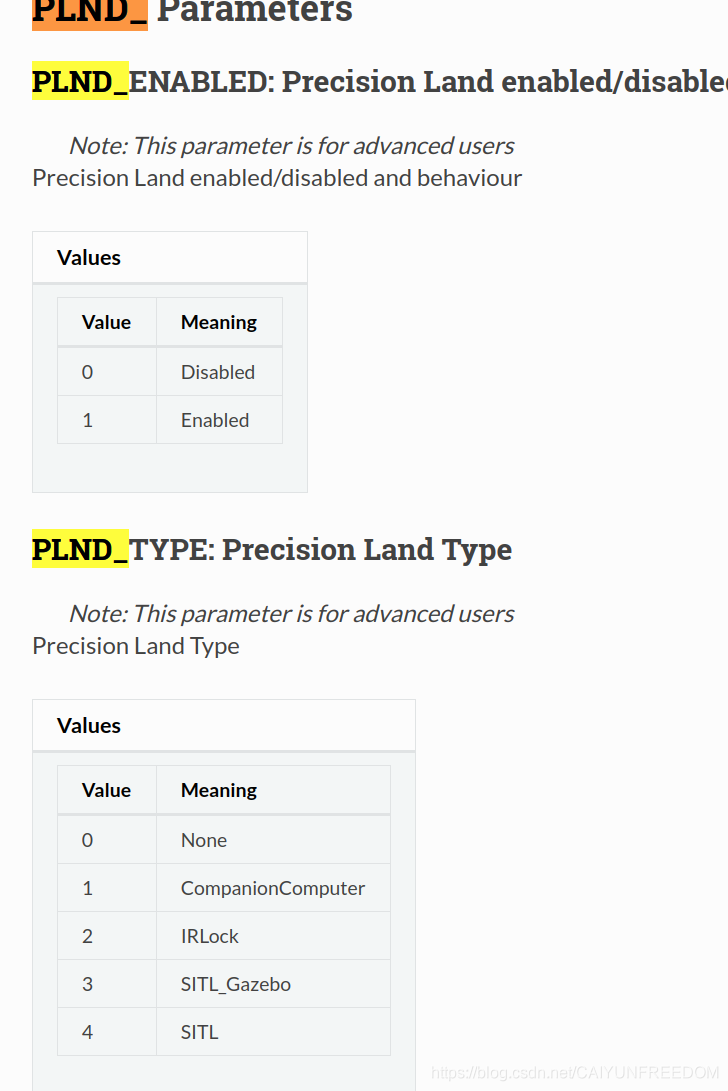
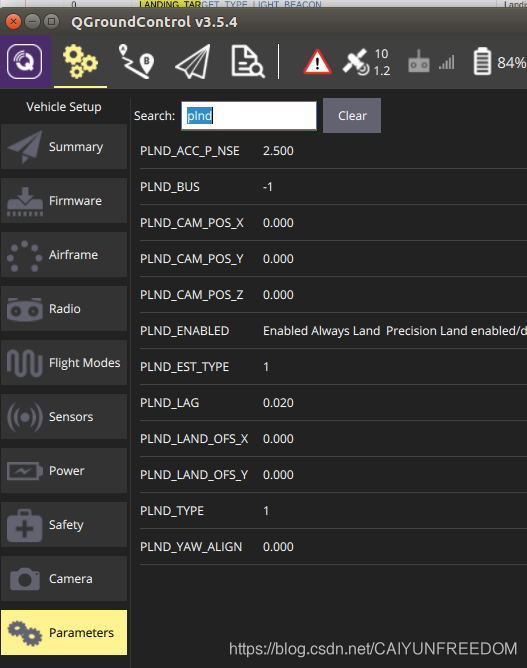
PLND_TYPE

# 无人机通过mavlink实现apriltag定点降落例程
#
# 这个脚本使用MAVLink协议发送监测到的AprilTag信息到 ArduPilot / PixHawk控制器,使用OpenMV Cam精确着陆。
#
# P4 = TXD
import image, math, pyb, sensor, struct, time
# 参数#################################################################
uart_baudrate = 115200
MAV_system_id = 1
MAV_component_id = 0x54
MAX_DISTANCE_SENSOR_enable = True
lens_mm = 2.8 # Standard Lens.
lens_to_camera_mm = 22 # Standard Lens.
sensor_w_mm = 3.984 # For OV7725 sensor - see datasheet.
sensor_h_mm = 2.952 # For OV7725 sensor - see datasheet.
# 下面字典中只有标签ID的标签才会被此代码接受。您可以添加尽可能多的标签ID到下面的字典
# 对于每个标签ID,您需要提供黑色标签边界的长度(毫米)。标签黑色边框正方形的任何一边将工作。
valid_tag_ids = {
0 : 165, # 8.5" x 11" tag black border size in mm
1 : 165, # 8.5" x 11" tag black borde 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1147
1147

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









