






 本文详细介绍了ArduPilot无人机飞行控制系统中的关键参数设置,包括RTL_ALT回家时的高度参数和RC9_OPTION遥控输入选项,为用户提供深入理解及正确配置指南。
本文详细介绍了ArduPilot无人机飞行控制系统中的关键参数设置,包括RTL_ALT回家时的高度参数和RC9_OPTION遥控输入选项,为用户提供深入理解及正确配置指南。
https://ardupilot.org/copter/docs/parameters.html#frame-class
git submodule update --init --recursive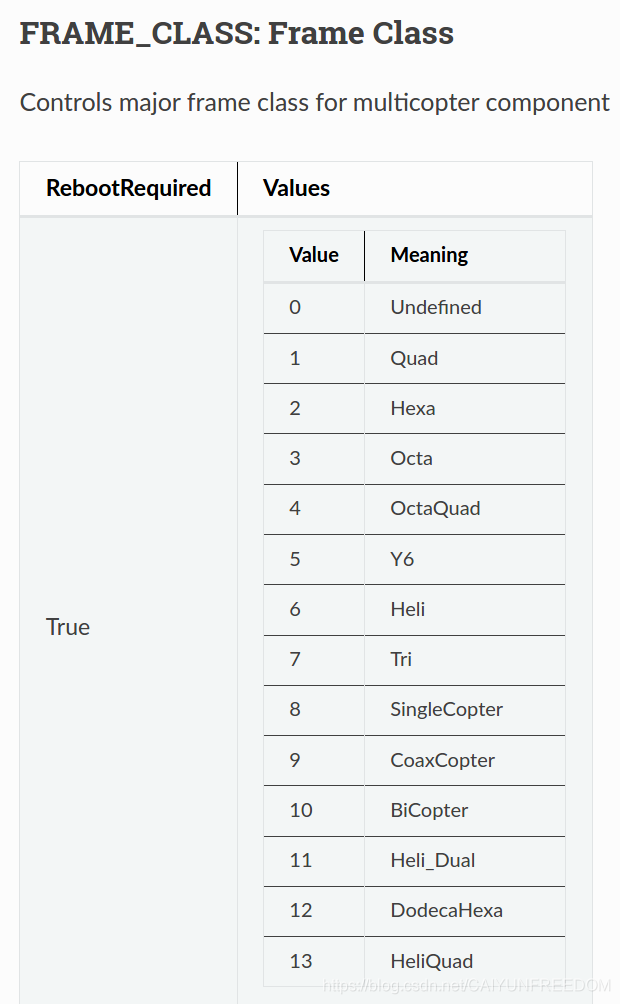
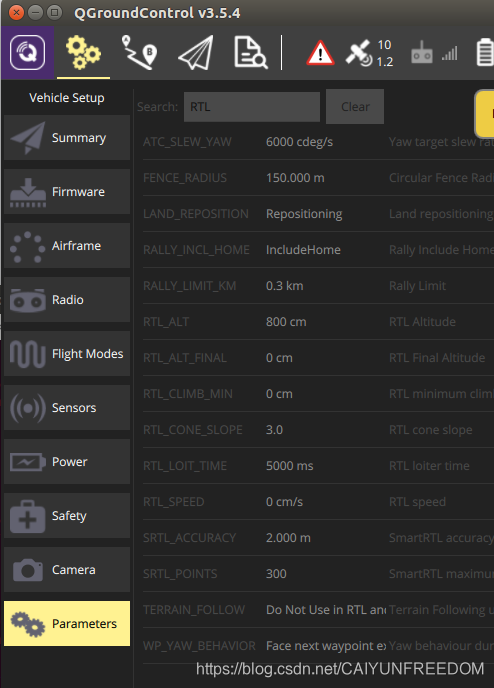
参数RTL_ALT 回家时高度
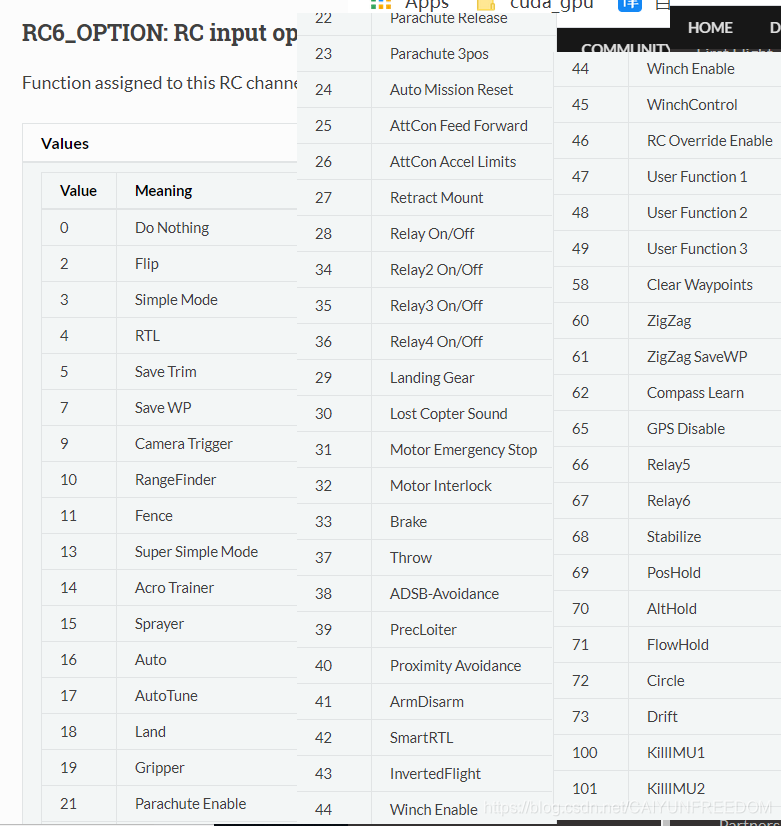
https://ardupilot.org/copter/docs/parameters.html#rc9-option-rc-input-option
https://ardupilot.org/copter/docs/parameters-Copter-stable-V4.0.3.html?highlight=parameters

















 5016
5016

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









