




 本文介绍了自适应滤波器的基本概念,包括维纳滤波器的原理和自适应滤波器的发展。自适应滤波器通过调整参数以适应输入信号的变化,分为时域和空域两种类型。时域滤波器如FIR和IIR,空域滤波器在智能天线中应用广泛,利用信号和干扰的空间特性进行干扰抑制。文章深入探讨了滤波器的组成、工作原理及时空对应关系。
本文介绍了自适应滤波器的基本概念,包括维纳滤波器的原理和自适应滤波器的发展。自适应滤波器通过调整参数以适应输入信号的变化,分为时域和空域两种类型。时域滤波器如FIR和IIR,空域滤波器在智能天线中应用广泛,利用信号和干扰的空间特性进行干扰抑制。文章深入探讨了滤波器的组成、工作原理及时空对应关系。
假定线性滤波器的输入为有用信号和噪声之和,两者均为广义平稳过程且已知他们的二阶统计特性,根据最小均方误差准则(滤波器的输出信号与需要信号之差的均方值最小),求得最佳线性滤波器的参数,这种滤波器成为维纳滤波器。在此基础上,人们研究了根据最大输出信噪比准则、统计监测准则以及其他最佳准则求得的最佳线性滤波器,在一定条件下,这些滤波器与维纳滤波器等价,因而讨论线性滤波时,一般以维纳滤波器为参考。
维纳滤波器要求有两点,1,输入过程广义平稳,2,输出过程的统计特性已知。由于输入过程经常是带有干扰的,且特性未知,为了满足维纳滤波的要求,就开始了自适应滤波器的研究。
自适应滤波器通过训练样本调整自身的参数,称为学习过程,输入过程统计特性变化时,自适应滤波器开始调整自己的参数,称为跟踪过程。自适应滤波器包括自适应时域滤波和自适应空域滤波(又称智能天线、自适应天线、自适应阵列、自适应波束形成),与信息论,优化理论,检测与估计理论相关。
1 自适应滤波器组成*
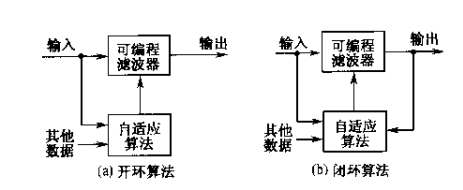
如图,自适应滤波分为可编程滤波器(滤波部分)以及自适应算法(控制部分)。滤波部分参数可变,控制部分控制滤波部分参数,主要根据滤波器输入的统计特性进行处理。
开环算法的控制输出仅取决于滤波器输入和某些其他数据,闭环算法同时也取决于滤波器输出,输出反馈能在滤波器输入变化时保持输出最佳,但是稳定性差切收敛速度慢
2 可编程滤波器
自适应滤波的参数随输入信号变化而变化,因而是非线性和时变的。其中的可编程滤波器当参数固定时,可能是线性或者非线性的。
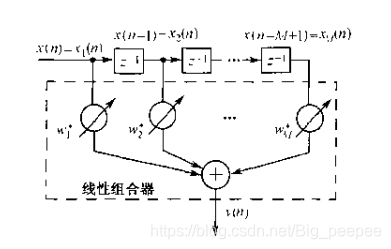
时域线性可编程滤波器有FIR和IIR横式滤波和各种格形滤波。
2.1时域FIR横式滤波器
 <
<
自适应滤波学习笔记(一)
最新推荐文章于 2024-06-12 07:30:00 发布
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 2593
2593

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









