







 本文介绍了一种名为ASIS的端到端框架,旨在同时解决点云中的实例分割和语义分割问题。通过改进的损失函数和ASIS模块,实现点云中不同实例的更好分离和语义预测的准确性。实验证明,该方法在S3DIS和ShapeNet数据集上超越了现有的3D分割方法。
本文介绍了一种名为ASIS的端到端框架,旨在同时解决点云中的实例分割和语义分割问题。通过改进的损失函数和ASIS模块,实现点云中不同实例的更好分离和语义预测的准确性。实验证明,该方法在S3DIS和ShapeNet数据集上超越了现有的3D分割方法。
标题-Associatively Segmenting Instances and Semantics in Point Clouds
作者-Xinlong Wang1 Shu Liu2 Xiaoyong Shen2 Chunhua Shen1 Jiaya Jia2;3
介绍
实例分割,语义分割:检测场景中由最小单位的集合代表的特定信息的区域。例如。一个点云可以分析成几组点,每个组表示一个类。或者一个单独的实例。
应用点:如自动驾驶,增强现实
现状:没有先进工作将两项任务结合。
冲突点:实例分割是要是被出同一类物体的不同实例,语义分割是想让同一类物体有同样的标签。
协作点:语义分割识别出不同的类,而不同实例肯定属于不同的类。实例分割将相同的标签赋予一个实例。因为同一个实例必定属于同一个类别。
简单结合方法:
- 简单方法1:给出语义标签,在单独的标签基础上跑实例分割。缺点:实力分割很大程度上取决于语义分割的表现。
- 简单方法2:给出实例标签,将所有实例分类将预测的类标签赋予该实例的每个点。缺点:不准确的实例预测会严重混淆downstream object classifiers。
这两种方法都是step-wise paradigm。都不是最优解法,效率低下。
本文将两项任务结合到一起成端到端平行的训练框架。
作者首先介绍了同时分割语义和实例的baseline。方法类似Semantic instance segmentation with a discriminative loss function.中对2D图片的方法,作者将网络修剪成适用于点云的。网络有两个分支:一个是每个点的语义预测;另一个输出点级的嵌套(embeddings), 属于同一个实例的点集靠近,不属于的远离。该baseline在训练和表现上已经比state-of-the-art的SGPN表现好了。基于该基线,提出了ASIS
利用提出的ASIS方法,网络可以学习语义感知的实例嵌套,其中属于不同语义类的点的嵌入通过特征融合进一步自动分离。
效果:
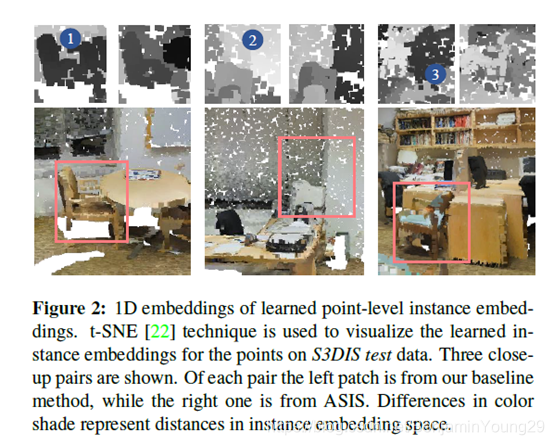
不同类的点之间间距更大。如1中桌子椅子,2中窗户和墙,3中椅子柜子。此外,利用同一实例中点的语义特征进行融合,使每点的语义预测更加准确。语义分割期间一个点会被分配成一个类别,因为包含这个点的实例属于该类别。
该方法对不同的主干网络适用,如PointNet和PointNet++。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 4529
4529

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









