



 本课程由Gabriel Corbett讲授,旨在帮助考生准备并通过SOLIDWORKS Professional高级钣金(CSWPA-SM)认证考试。课程涵盖考试技巧、钣金工具使用、边缘法兰操作等关键知识点。
本课程由Gabriel Corbett讲授,旨在帮助考生准备并通过SOLIDWORKS Professional高级钣金(CSWPA-SM)认证考试。课程涵盖考试技巧、钣金工具使用、边缘法兰操作等关键知识点。
Cert Prep: SOLIDWORKS Sheet Metal 中文字幕
证书准备:SOLIDWORKS钣金 中文字幕Cert Prep: SOLIDWORKS Sheet Metal
[外链图片转存失败(img-5aEr1wpT-1563678666361)(http://www.zwsub.com/thumbnail/601775_thumbnail.jpg)]
通过完成认证SOLIDWORKS Professional高级钣金(CSWPA-SM)考试,向雇主证明您了解一组SOLIDWORKS工具,这些工具有助于设计钣金零件
CSWPA-SM认证证明了您的专业知识,并且表明您拥有企业寻求和奖励的尖端技能
在这门课程中,Gabriel Corbett准备参加CSWPA-SM考试
加百列首先报道考试要求并分享测试技巧
然后,他会深入到具体的相关概念中,这些概念将刷新您的知识并为您准备通过测试,包括如何使用边缘法兰,斜接法兰,下摆,慢跑,平面图案,折弯表和自定义属性
他还展示了如何构建样本考试中的几个部分,并指导您如何构建,修改和验证模型
主题包括:
考试技巧
钣金工具
使用K因子弯曲计算,折弯扣除和折弯余量
使用转换为钣金工具
钣金切割清单属性
从图纸建模钣金零件
更新维度/方程
创建平面图案
加上下摆
- 嗨,我是Gabriel Corbett,欢迎参加认证的Solidworks Professional高级钣金考试准备课程。
在本课程中,我们将详细介绍考试的所有要求。
测试技术,指针和有效利用时间。
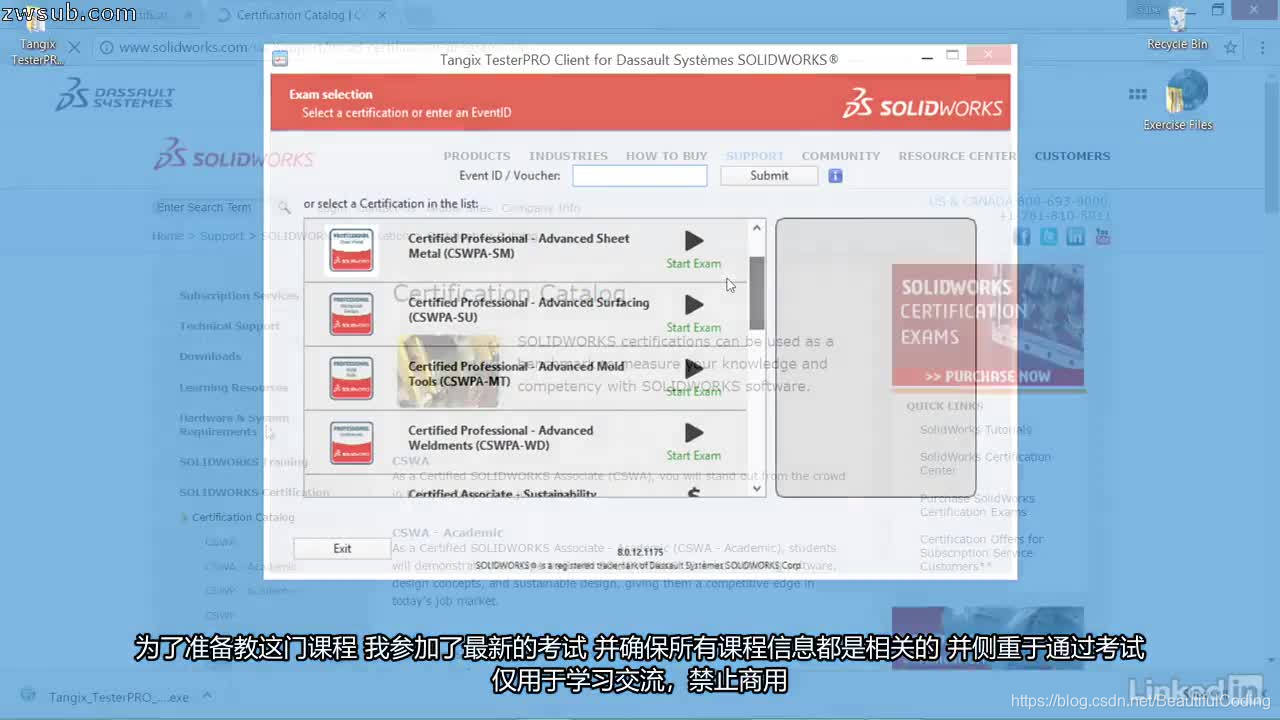
为了准备教这门课程,我参加了最新的考试,并确保所有课程信息都是相关的,并侧重于通过考试。
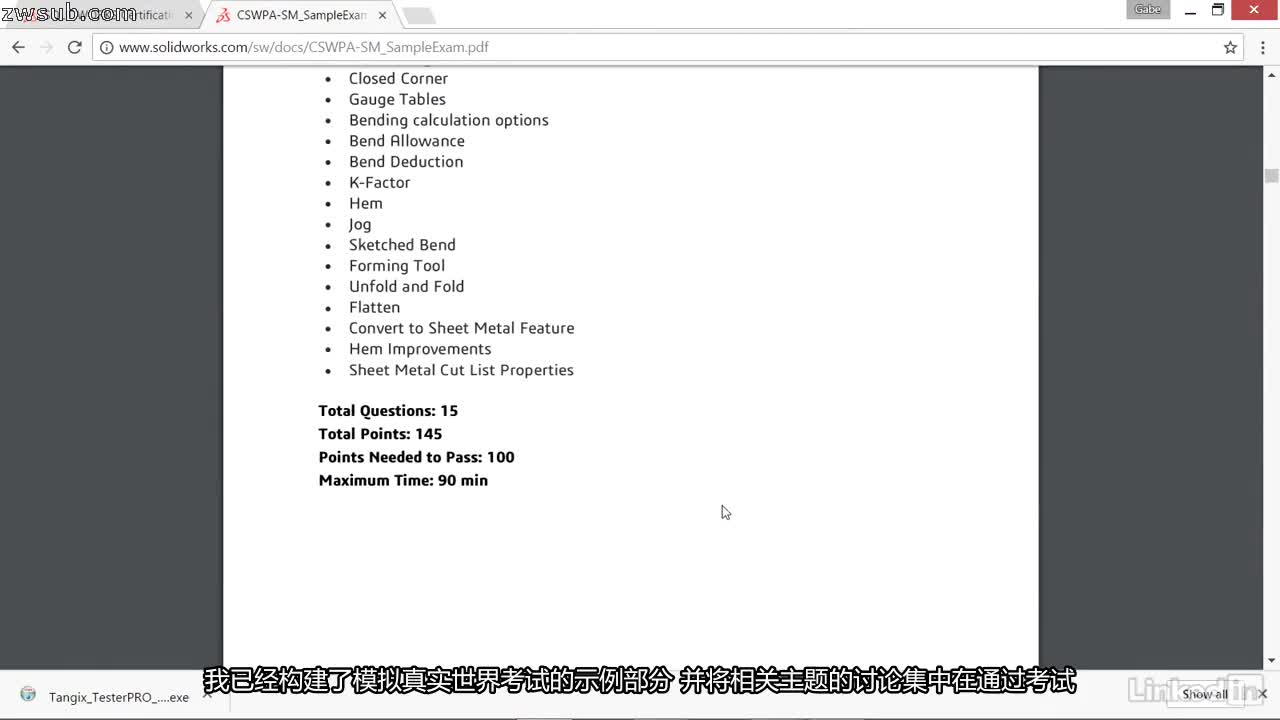
我们将从技能评估章节开始,重新提供您的知识,并为您提供关于您将在考试中看到的问题类型的重要见解。
我已经构建了模拟真实世界考试的示例部分,并将相关主题的讨论集中在通过考试。
我们将介绍创建钣金底座部件。
边缘法兰。
斜接法兰。
下摆。
慢跑。
还有更多。
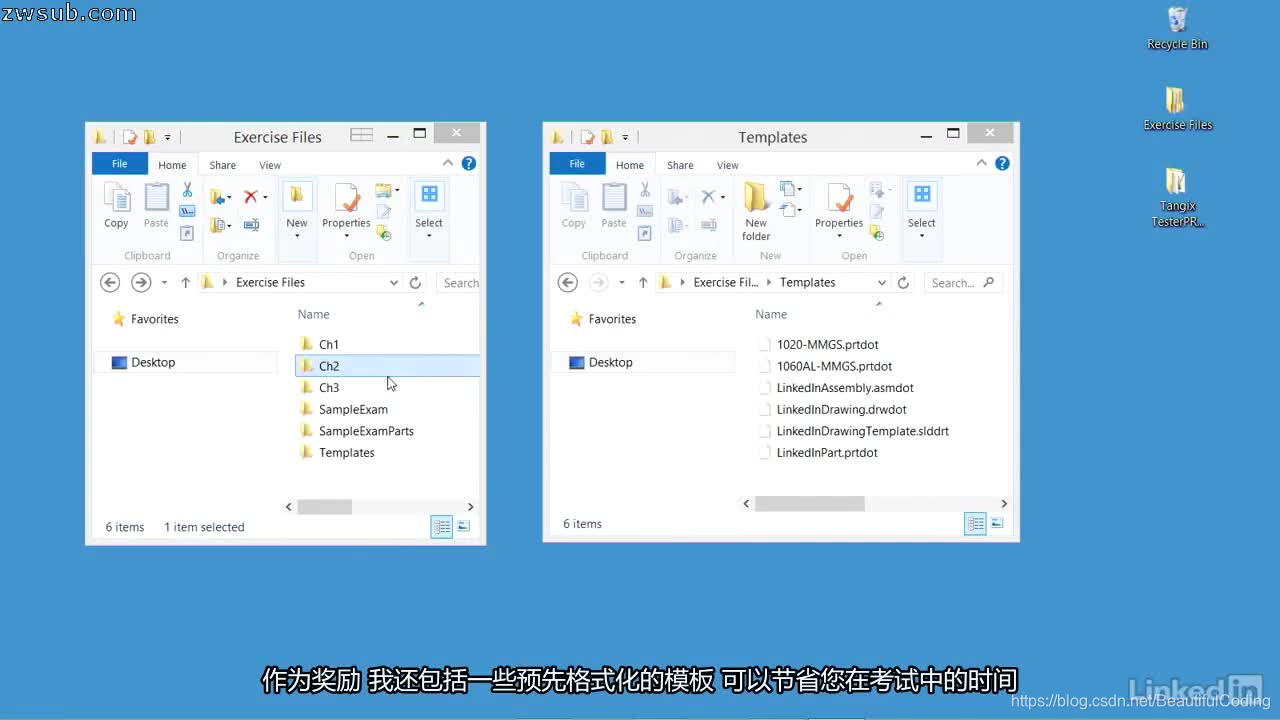
我们将介绍将零件链接到方程式并设置模板文件以开始。
作为奖励,我还包括一些预先格式化的模板,可以节省您在考试中的时间。
我们将从示例考试中构建几个部分,并逐步进行构建,修改和验证模型。
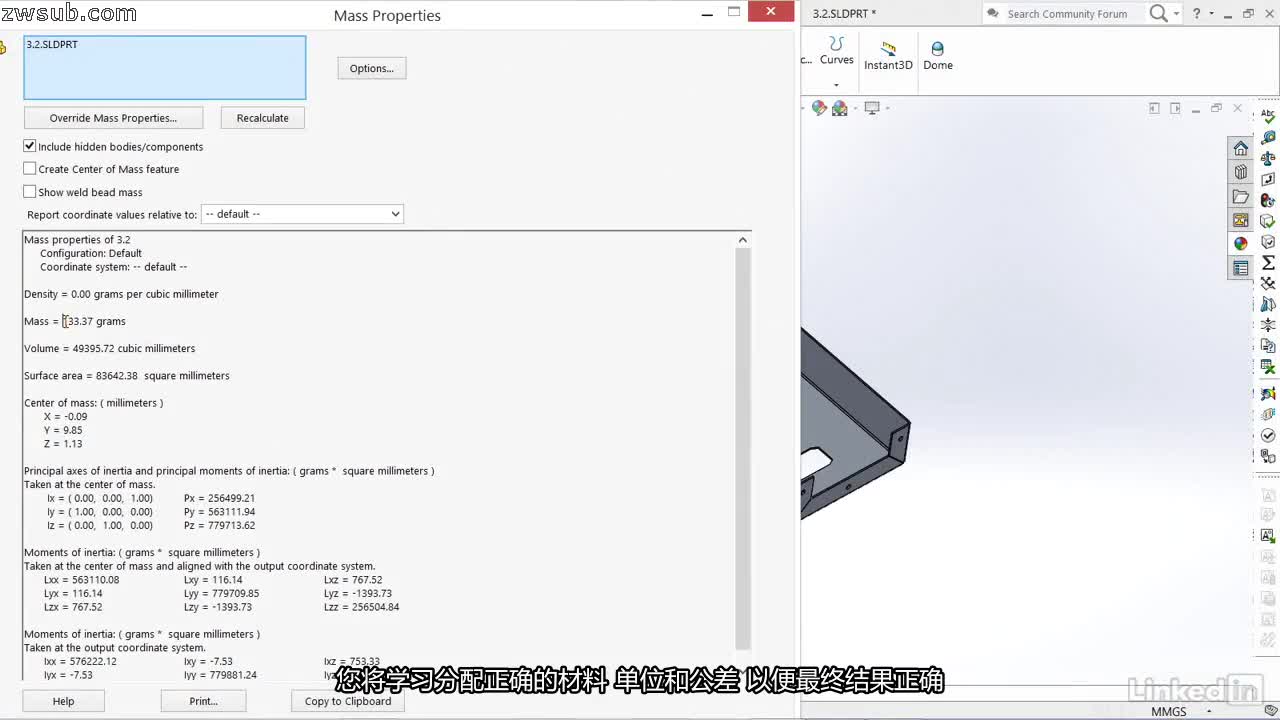
您将学习分配正确的材料,单位和公差,以便最终结果正确。
最后,我们将学习有关金属板的无切割特性以及如何轻松测量平面图案的长度,宽度和面积。
现在让我们开始使用Certified Solidworks Professional高级钣金考试准备课程。
本课程视频下载地址:证书准备:SOLIDWORKS钣金

















 3513
3513

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言










{kind=link}