



一、项目介绍
本项目基于YOLOv10目标检测算法开发了一套疲劳驾驶状态检测系统,专门用于实时识别驾驶员的精神状态。系统将驾驶员的眼部状态分类为"清醒(awake)"和"困倦(drowsy)"两个类别,通过监控驾驶员的面部特征特别是眼部区域来判断是否处于疲劳驾驶状态。为驾驶安全提供有效的技术保障。项目采用最新的YOLOv10架构,在保持YOLO系列算法高效检测速度的同时,进一步提升了检测精度和模型性能。
数据集介绍
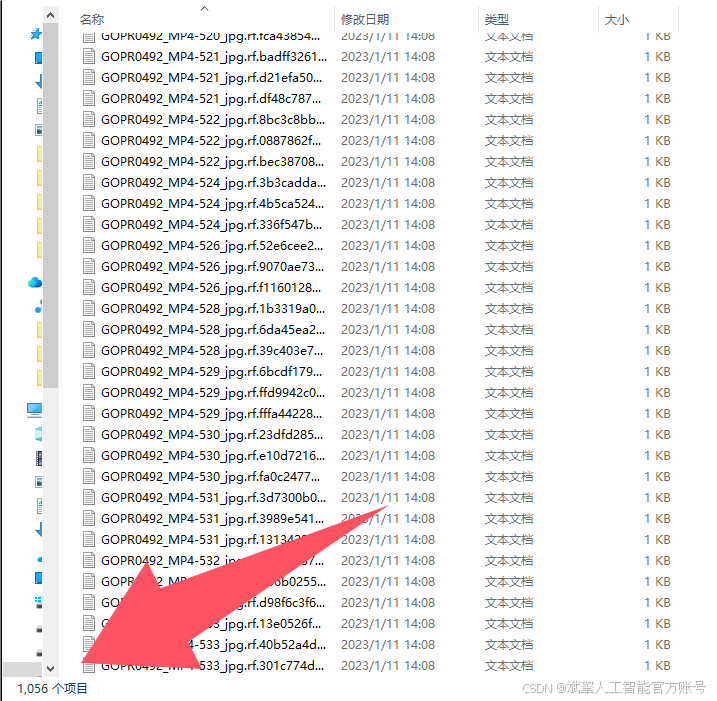
本项目使用的数据集共包含1,230张精心标注的驾驶员面部图像,按照机器学习标准流程划分为训练集、验证集和测试集三部分。其中训练集包含1,056张图像,用于模型参数的学习和优化;验证集包含103张图像,用于在训练过程中调整超参数和监控模型性能;测试集包含71张图像,用于最终评估模型的泛化能力和准确率。数据集的类别平衡经过精心设计,避免了样本不平衡对模型性能的潜在影响。
目录
基于深度学习YOLOv10的疲劳驾驶识别检测系统(YOLOv10+YOLO数据集+UI界面+Python项目源码+模型)_哔哩哔哩_bilibili
基于深度学习YOLOv10的疲劳驾驶识别检测系统(YOLOv10+YOLO数据集+UI界面+Python项目源码+模型)
二、项目功能展示
系统功能
✅ 图片检测:可对图片进行检测,返回检测框及类别信息。
✅ 视频检测:支持视频文件输入,检测视频中每一帧的情况。
✅ 摄像头实时检测:连接USB 摄像头,实现实时监测。
✅参数实时调节(置信度和IoU阈值)
-
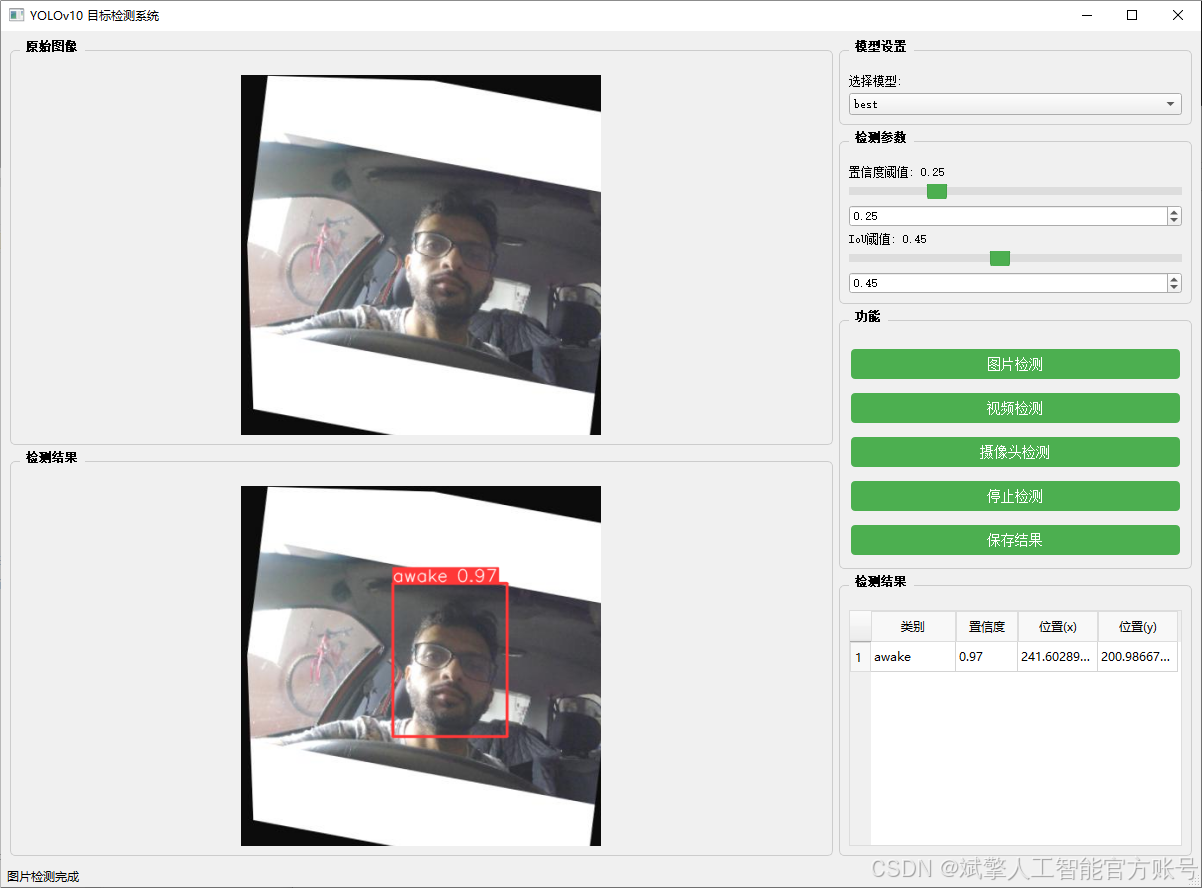
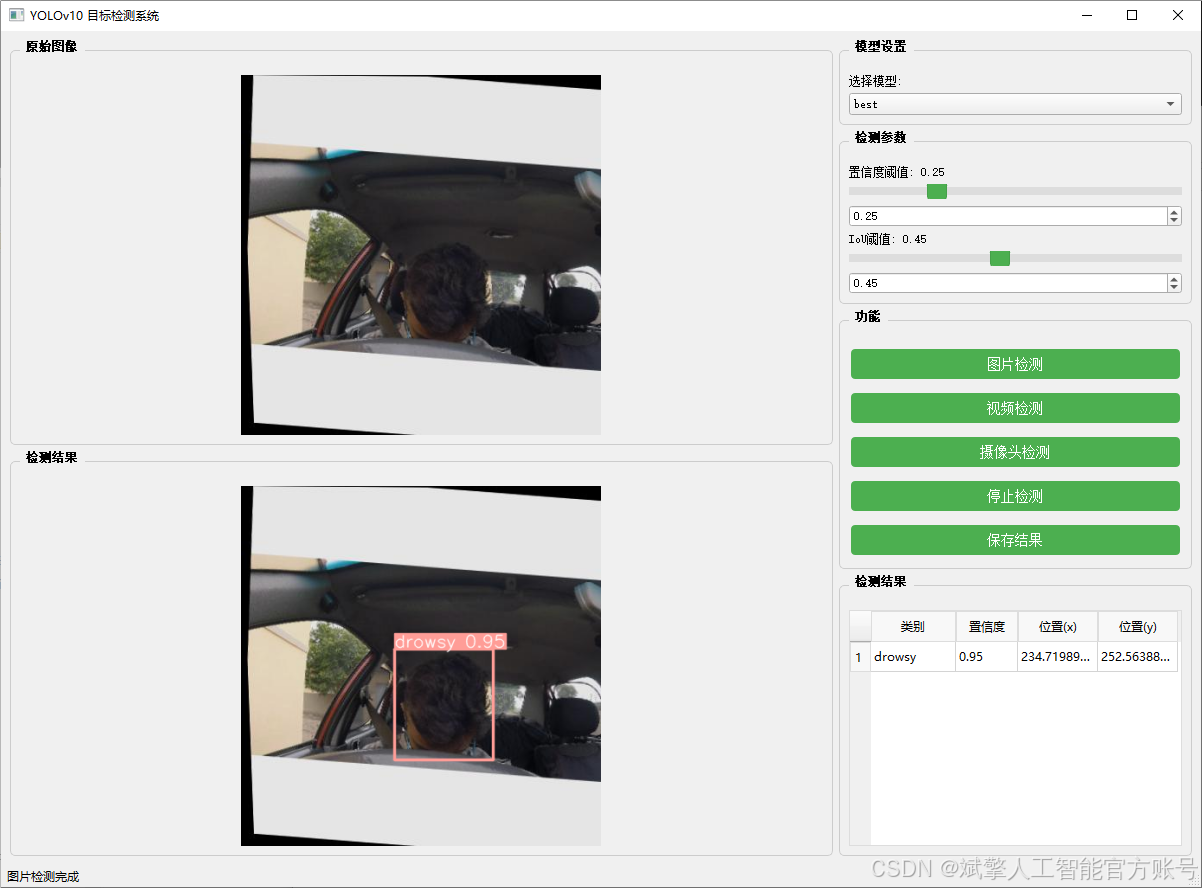
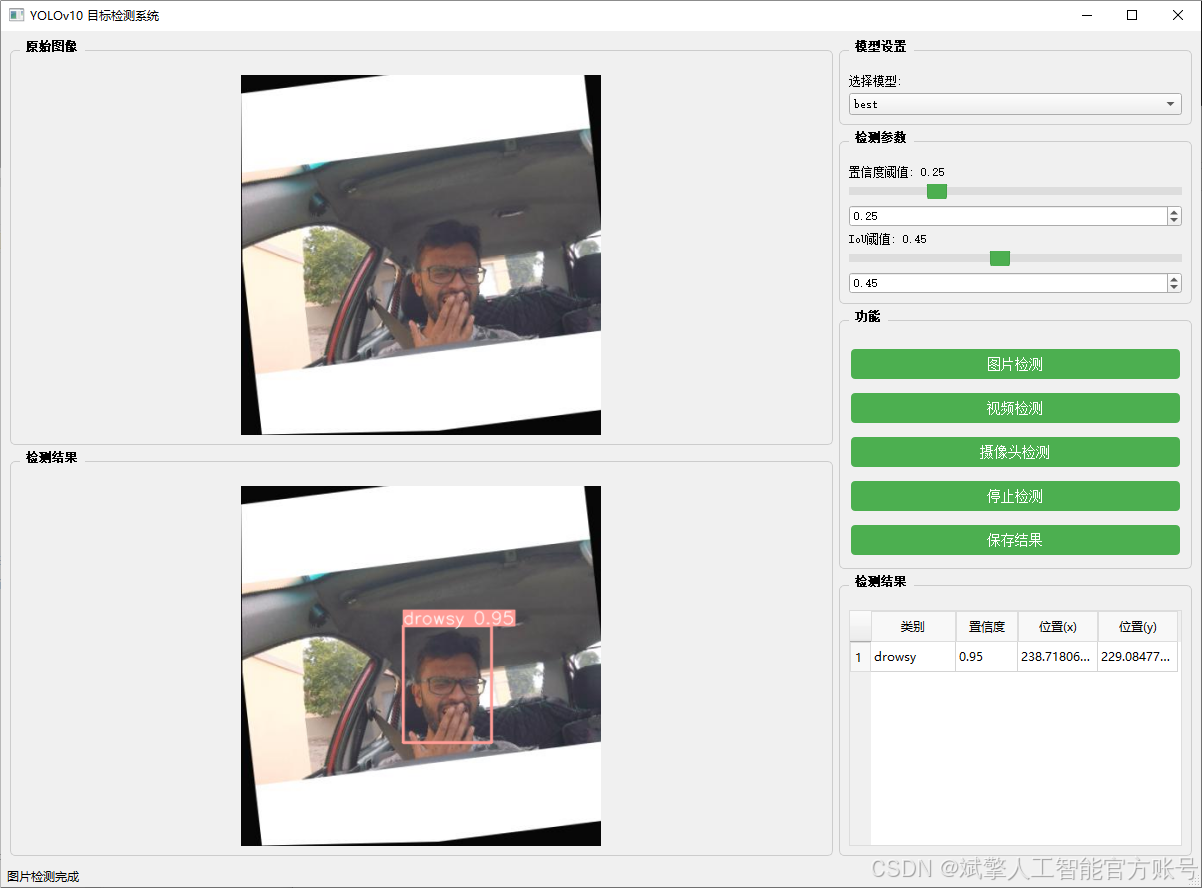
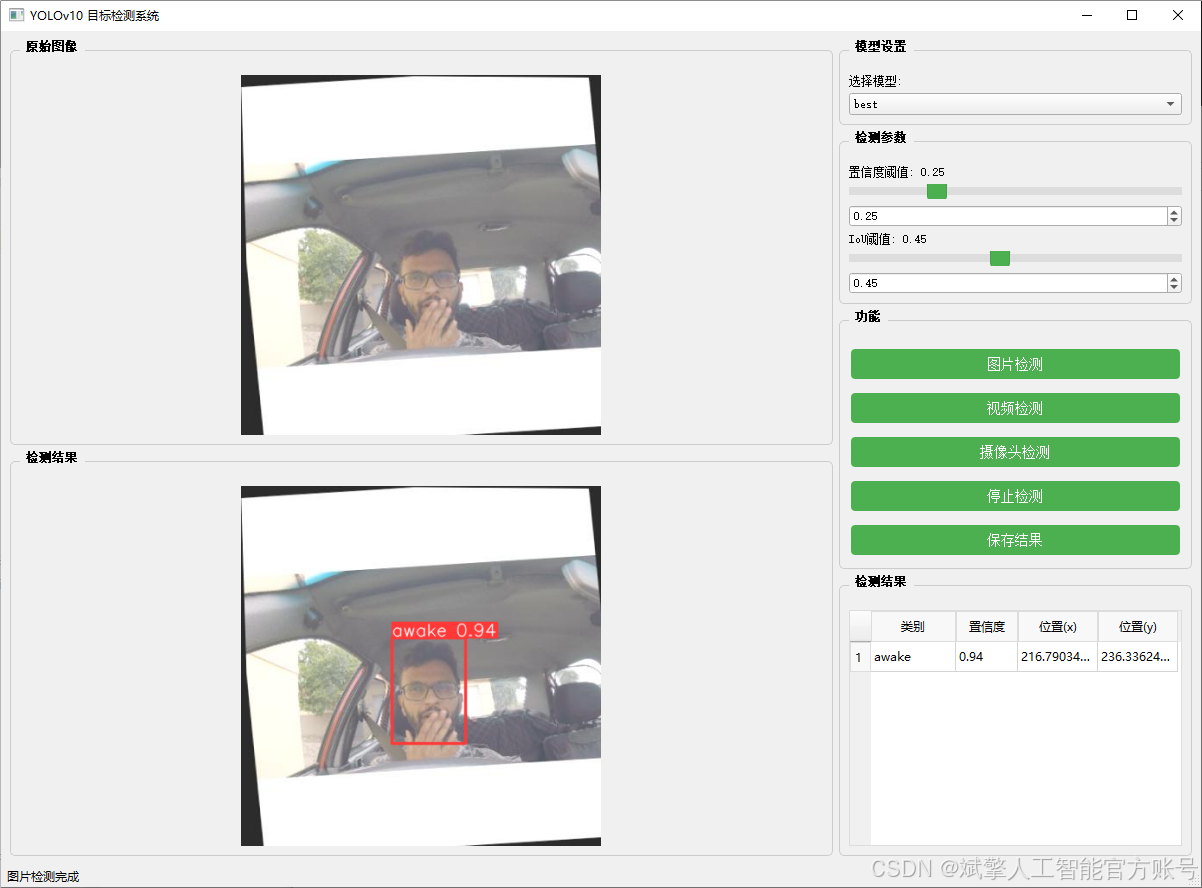
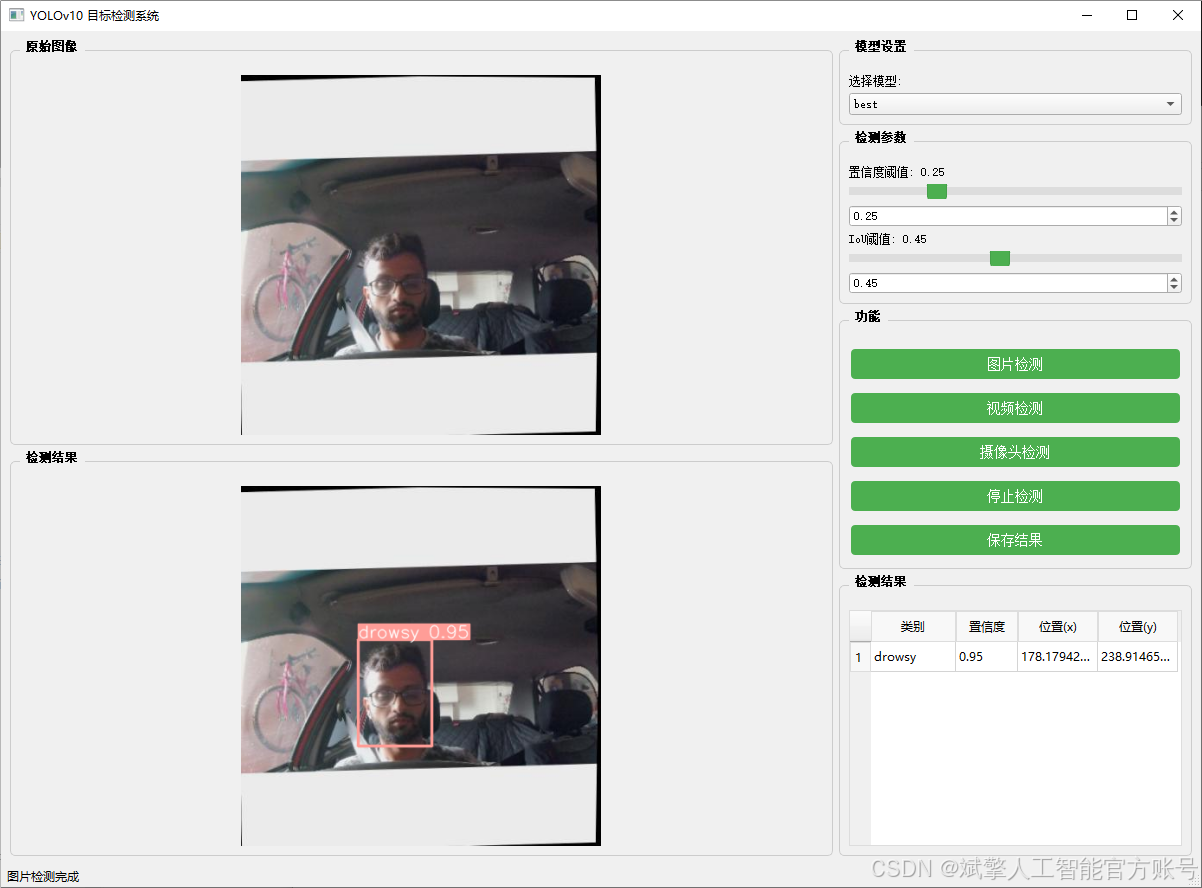
图片检测
该功能允许用户通过单张图片进行目标检测。输入一张图片后,YOLO模型会实时分析图像,识别出其中的目标,并在图像中框出检测到的目标,输出带有目标框的图像。
视频检测
视频检测功能允许用户将视频文件作为输入。YOLO模型将逐帧分析视频,并在每一帧中标记出检测到的目标。最终结果可以是带有目标框的视频文件或实时展示,适用于视频监控和分析等场景。
-
摄像头实时检测
该功能支持通过连接摄像头进行实时目标检测。YOLO模型能够在摄像头拍摄的实时视频流中进行目标检测,实时识别并显示检测结果。此功能非常适用于安防监控、无人驾驶、智能交通等应用,提供即时反馈。
核心特点:
- 高精度:基于YOLO模型,提供精确的目标检测能力,适用于不同类型的图像和视频。
- 实时性:特别优化的算法使得实时目标检测成为可能,无论是在视频还是摄像头实时检测中,响应速度都非常快。
- 批量处理:支持高效的批量图像和视频处理,适合大规模数据分析。
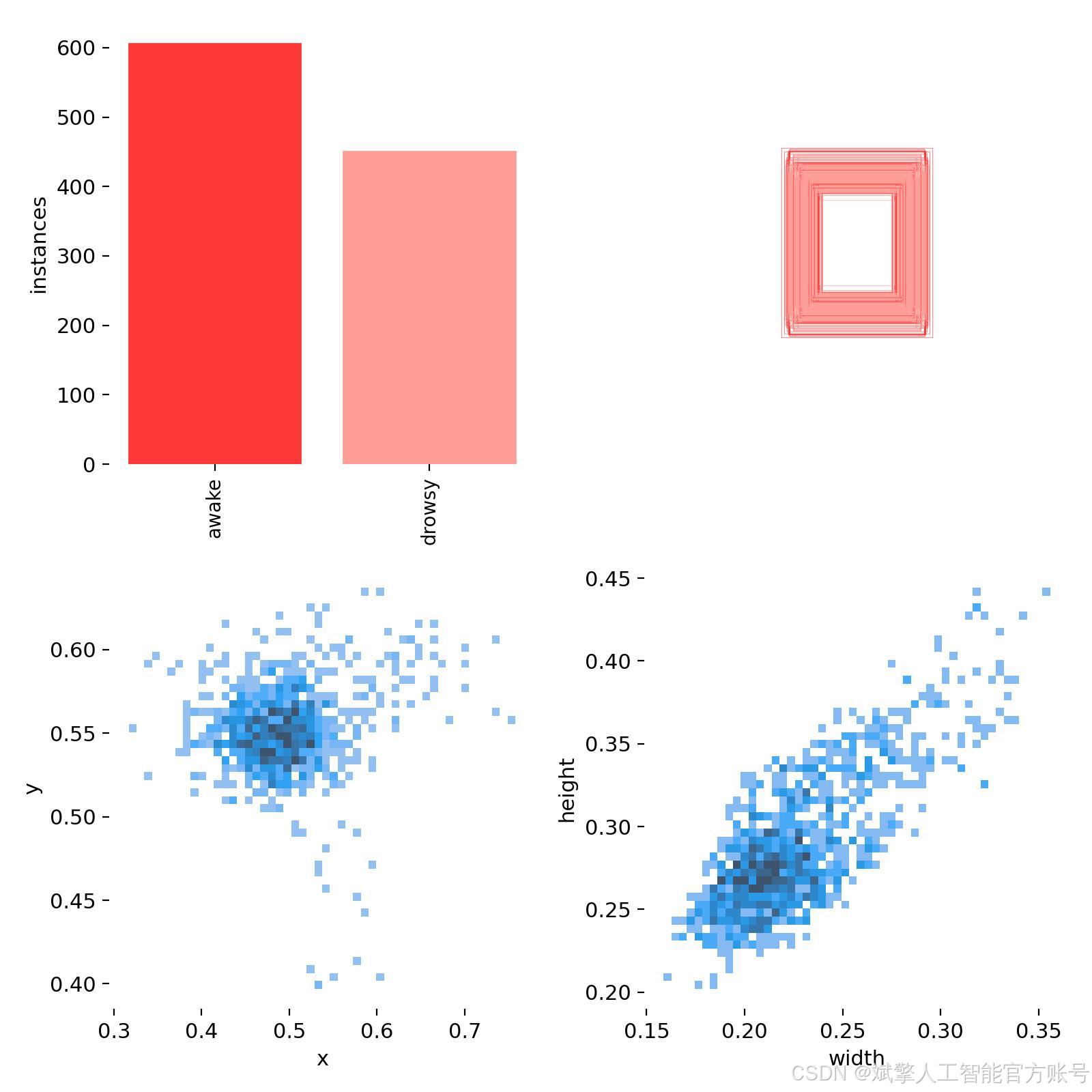
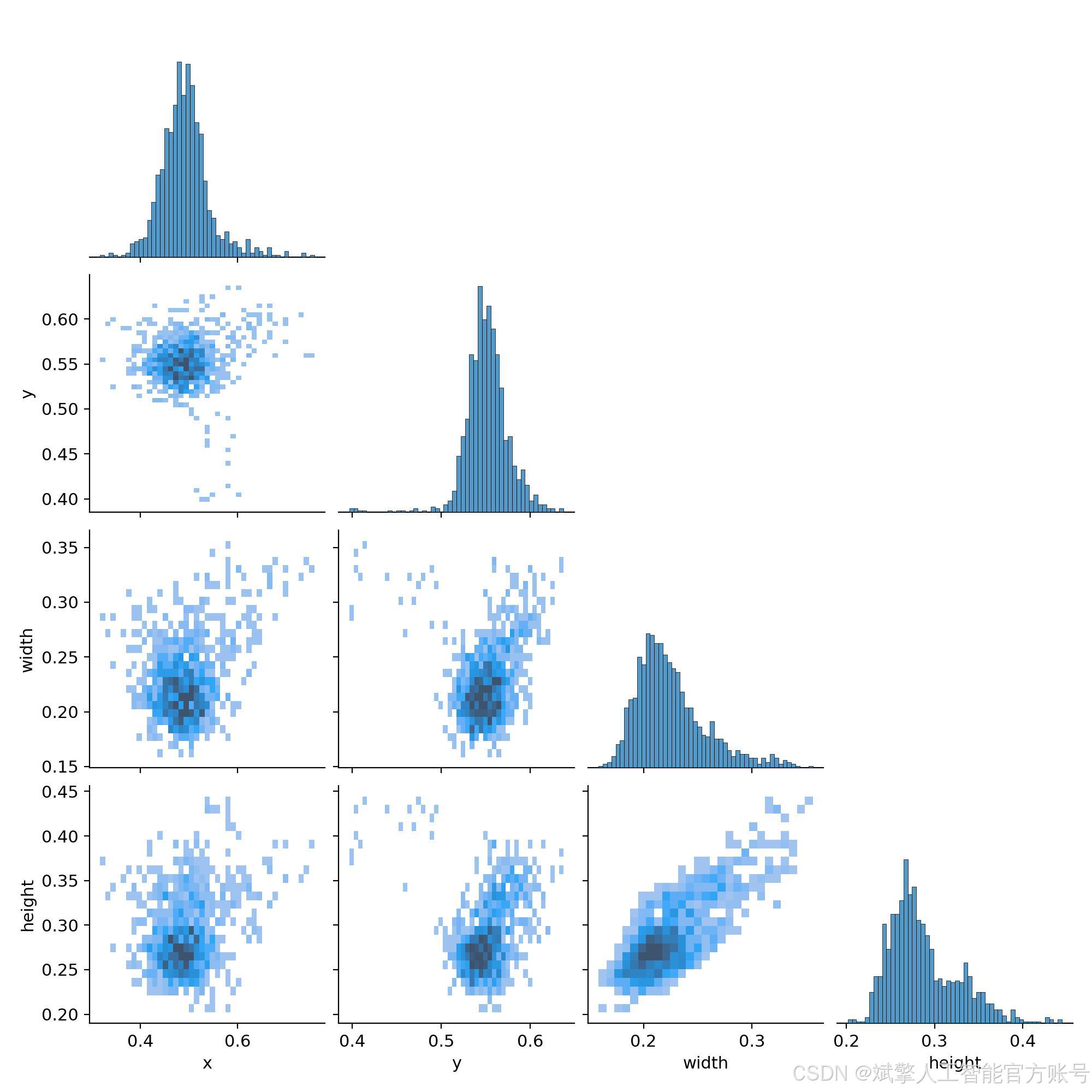
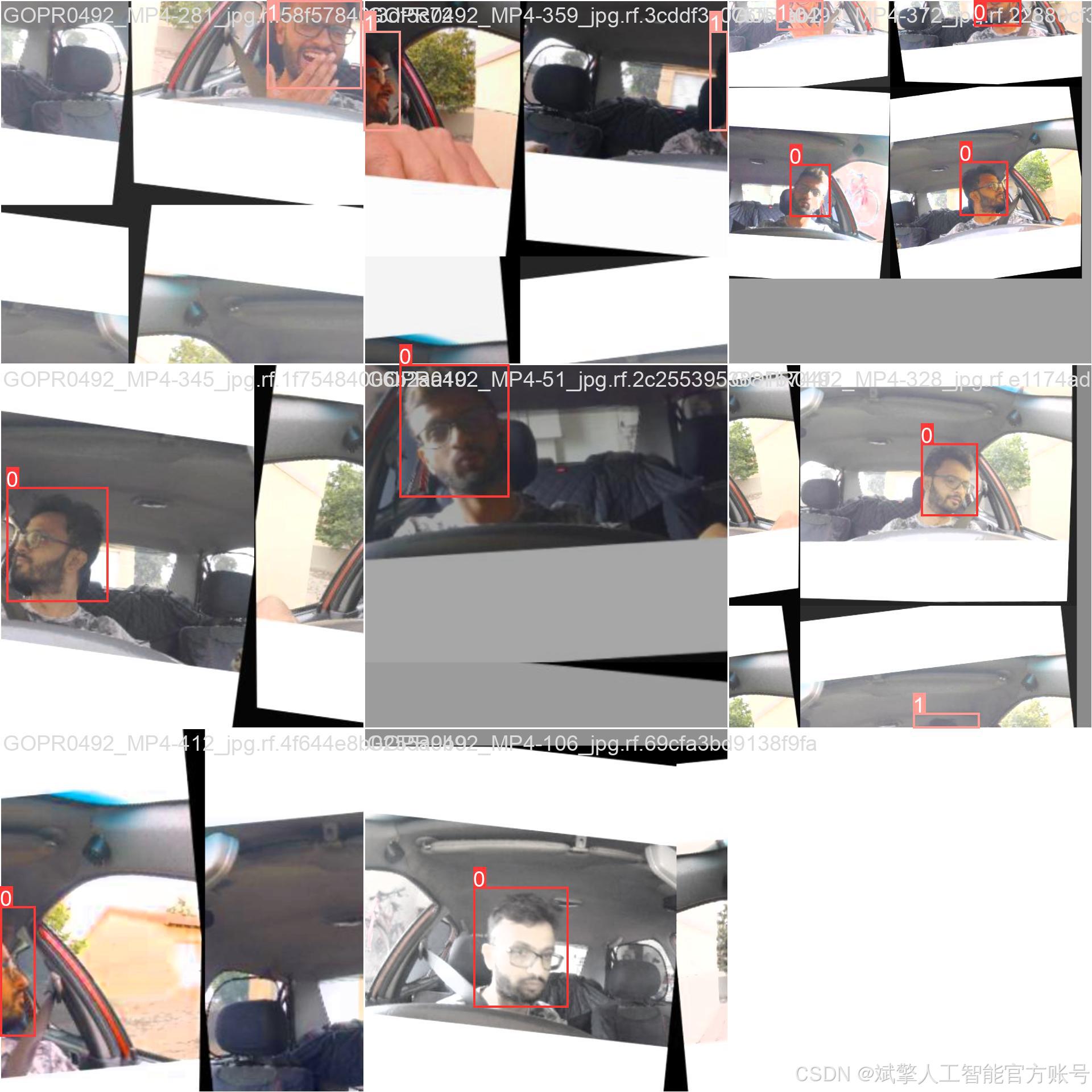
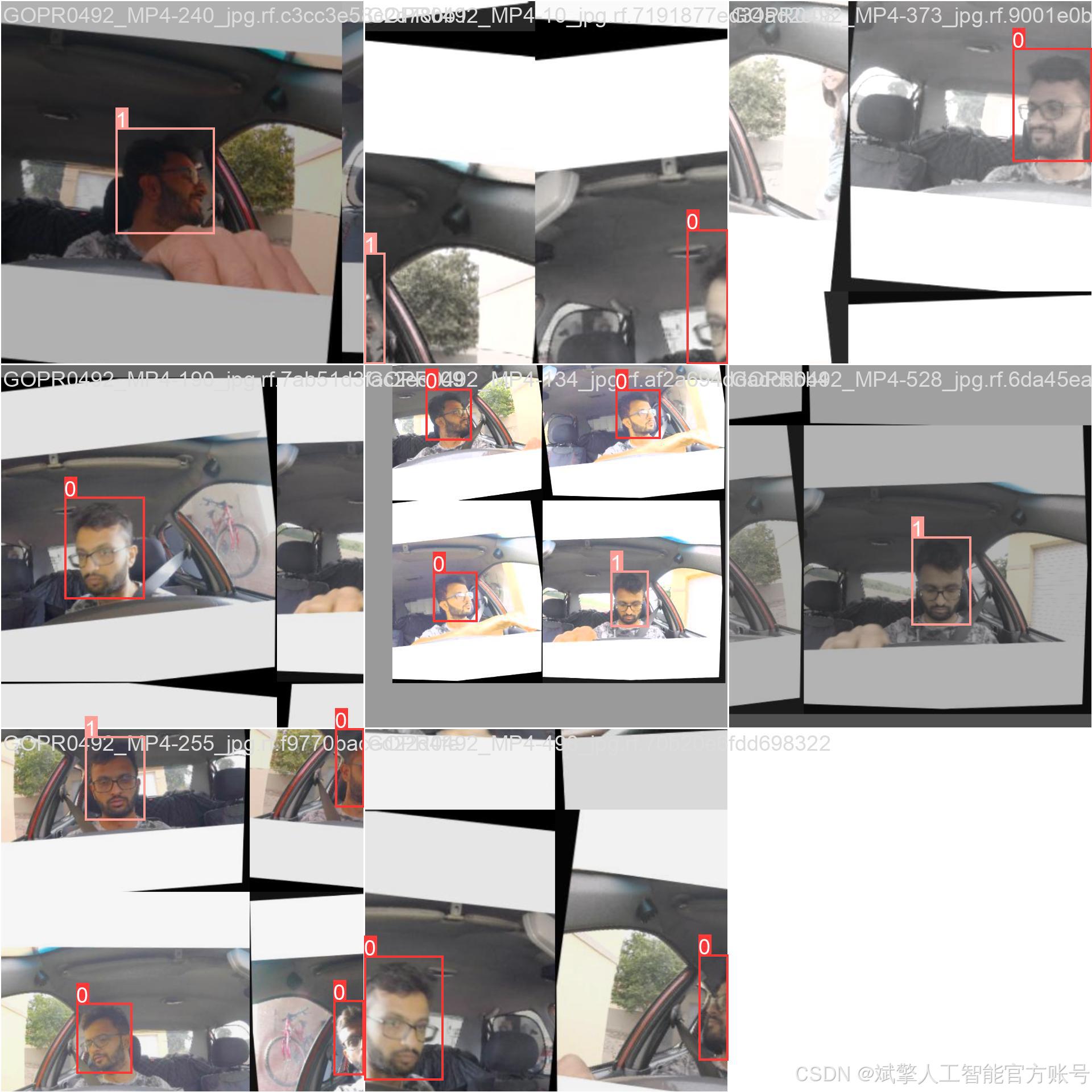
三、数据集介绍
数据集概述
本项目使用的数据集共包含1,230张精心标注的驾驶员面部图像,按照机器学习标准流程划分为训练集、验证集和测试集三部分。其中训练集包含1,056张图像,用于模型参数的学习和优化;验证集包含103张图像,用于在训练过程中调整超参数和监控模型性能;测试集包含71张图像,用于最终评估模型的泛化能力和准确率。数据集的类别平衡经过精心设计,避免了样本不平衡对模型性能的潜在影响。
数据集配置文件
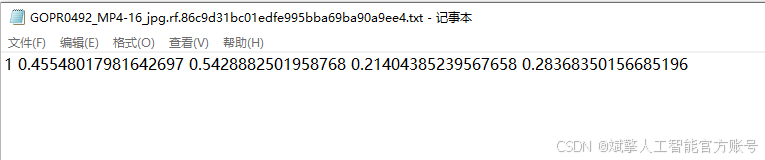
数据集采用YOLO格式的配置文件,主要包含:
train: F:\疲劳驾驶检测数据集\train\images
val: F:\疲劳驾驶检测数据集\valid\images
test: F:\疲劳驾驶检测数据集\test\images
nc: 2
names: ['awake', 'drowsy']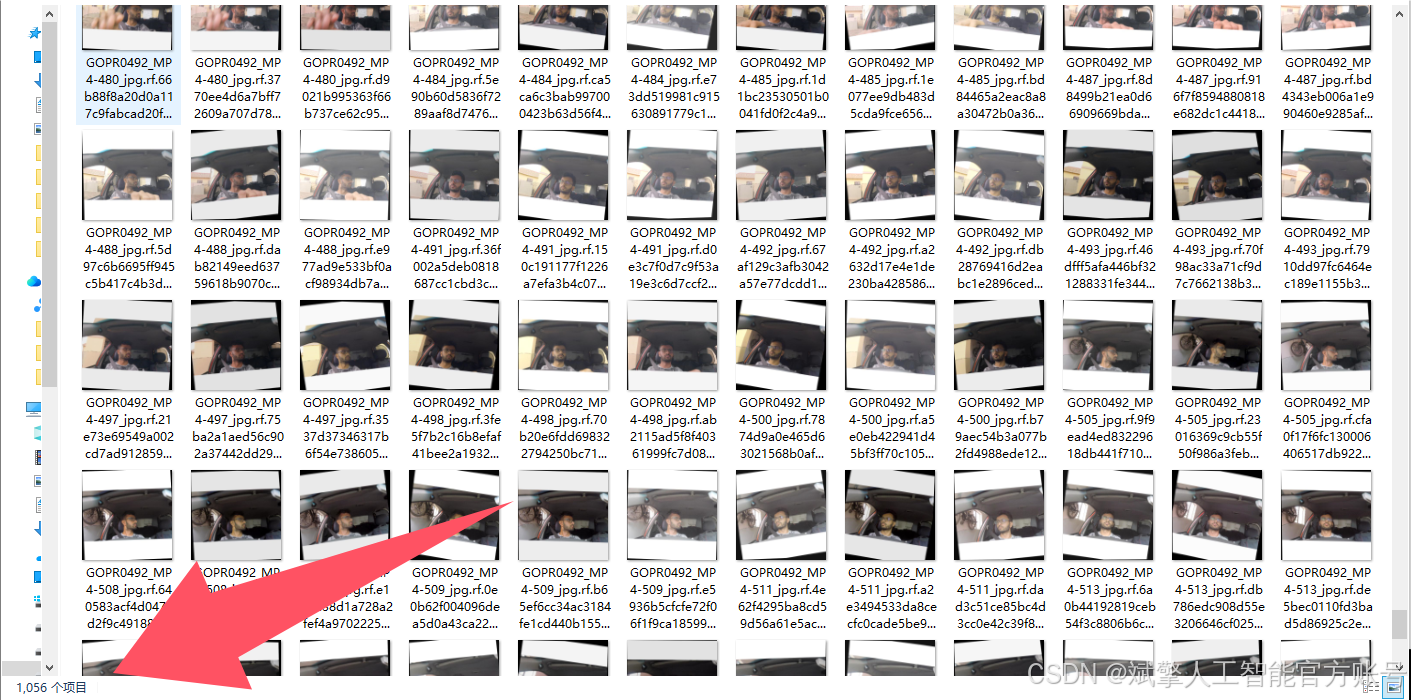
四、项目环境配置
创建虚拟环境
首先新建一个Anaconda环境,每个项目用不同的环境,这样项目中所用的依赖包互不干扰。
终端输入
conda create -n yolov10 python==3.9

激活虚拟环境
conda activate yolov10

安装cpu版本pytorch
pip install torch torchvision torchaudio

pycharm中配置anaconda


安装所需要库
pip install -r requirements.txt

五、模型训练
训练代码
from ultralytics import YOLOv10
model_path = 'yolov10s.pt'
data_path = 'datasets/data.yaml'
if __name__ == '__main__':
model = YOLOv10(model_path)
results = model.train(data=data_path,
epochs=500,
batch=64,
device='0',
workers=0,
project='runs/detect',
name='exp',
)根据实际情况更换模型 yolov10n.yaml (nano):轻量化模型,适合嵌入式设备,速度快但精度略低。 yolov10s.yaml (small):小模型,适合实时任务。 yolov10m.yaml (medium):中等大小模型,兼顾速度和精度。 yolov10b.yaml (base):基本版模型,适合大部分应用场景。 yolov10l.yaml (large):大型模型,适合对精度要求高的任务。
--batch 64:每批次64张图像。--epochs 500:训练500轮。--datasets/data.yaml:数据集配置文件。--weights yolov10s.pt:初始化模型权重,yolov10s.pt是预训练的轻量级YOLO模型。
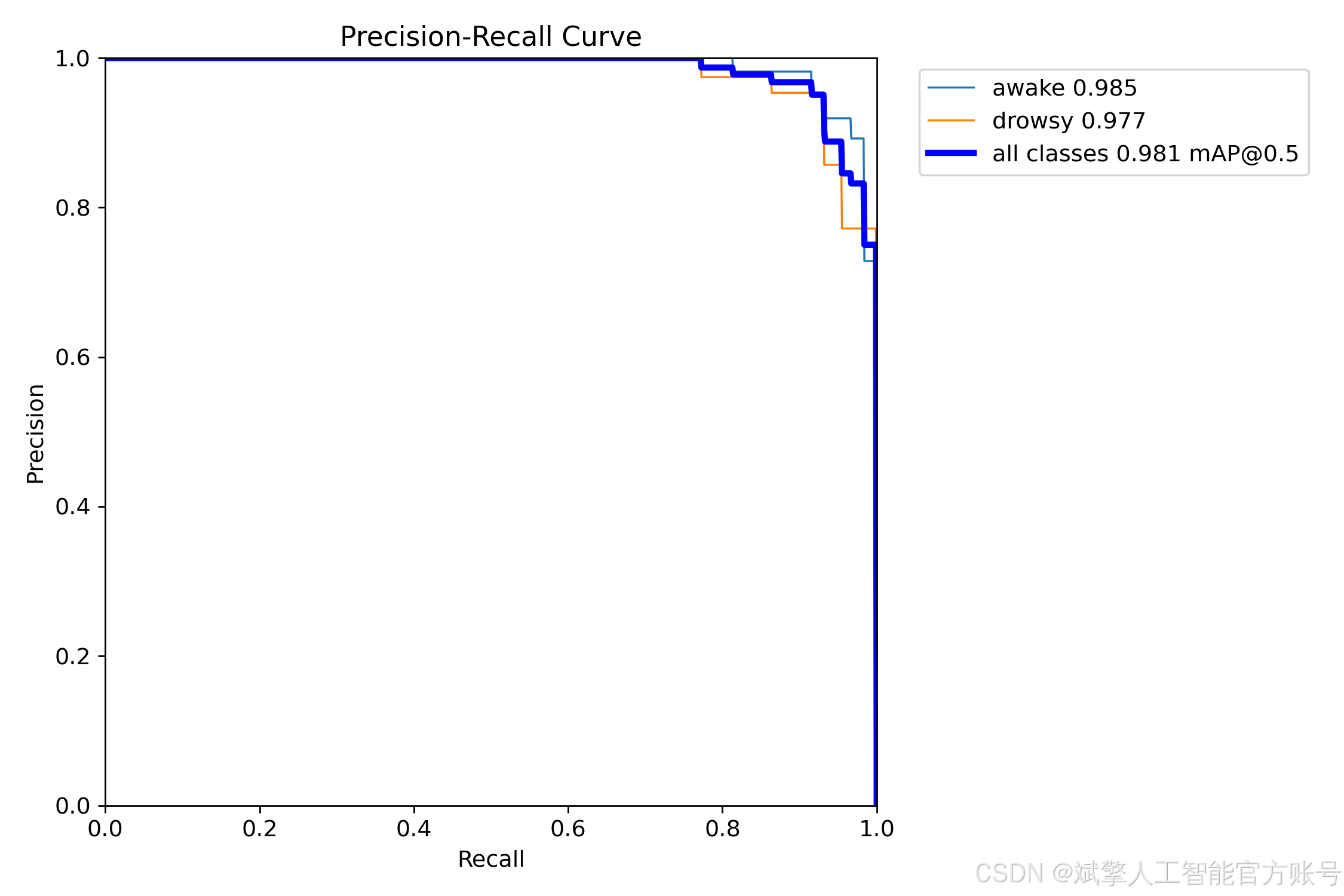
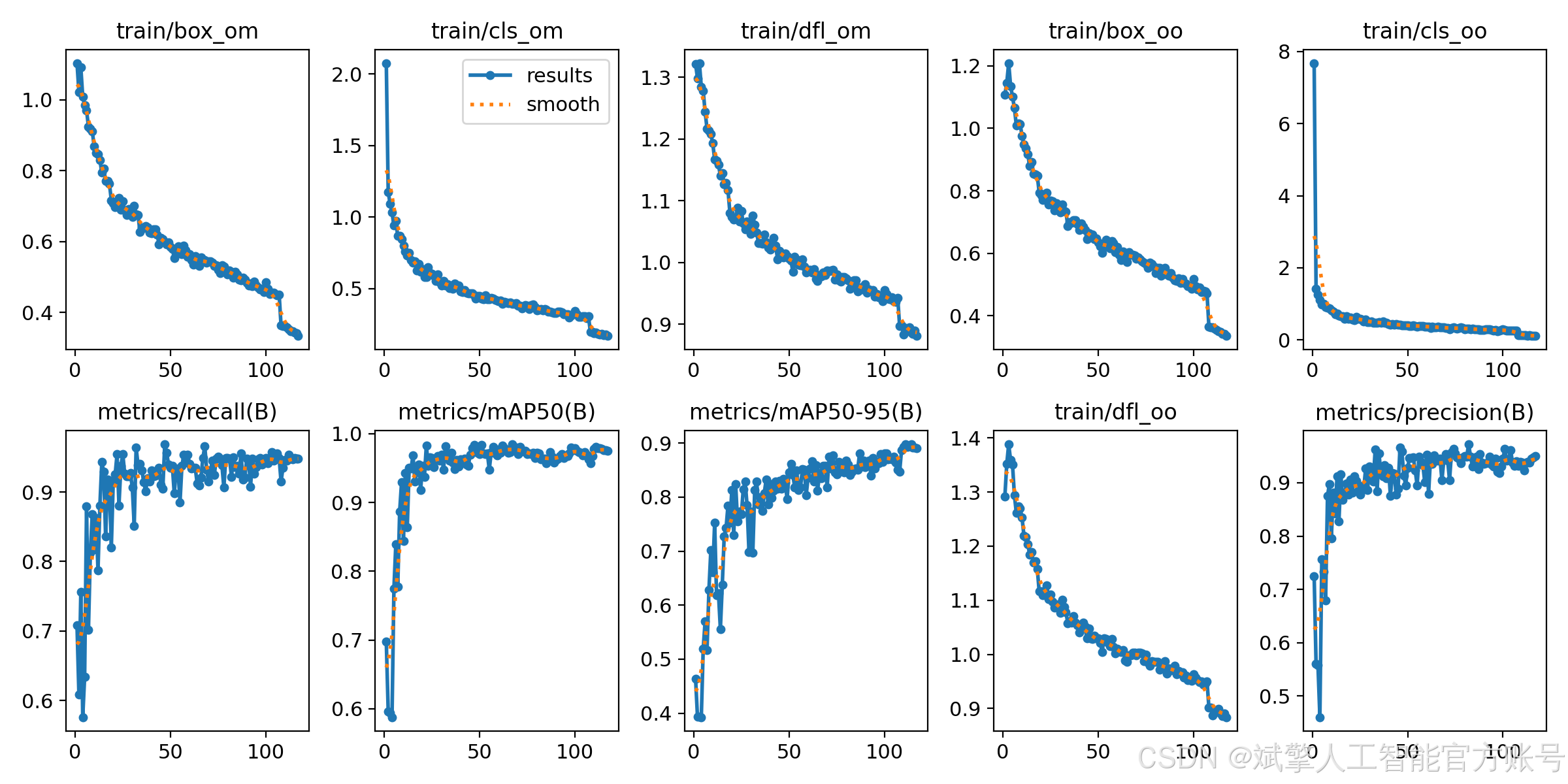
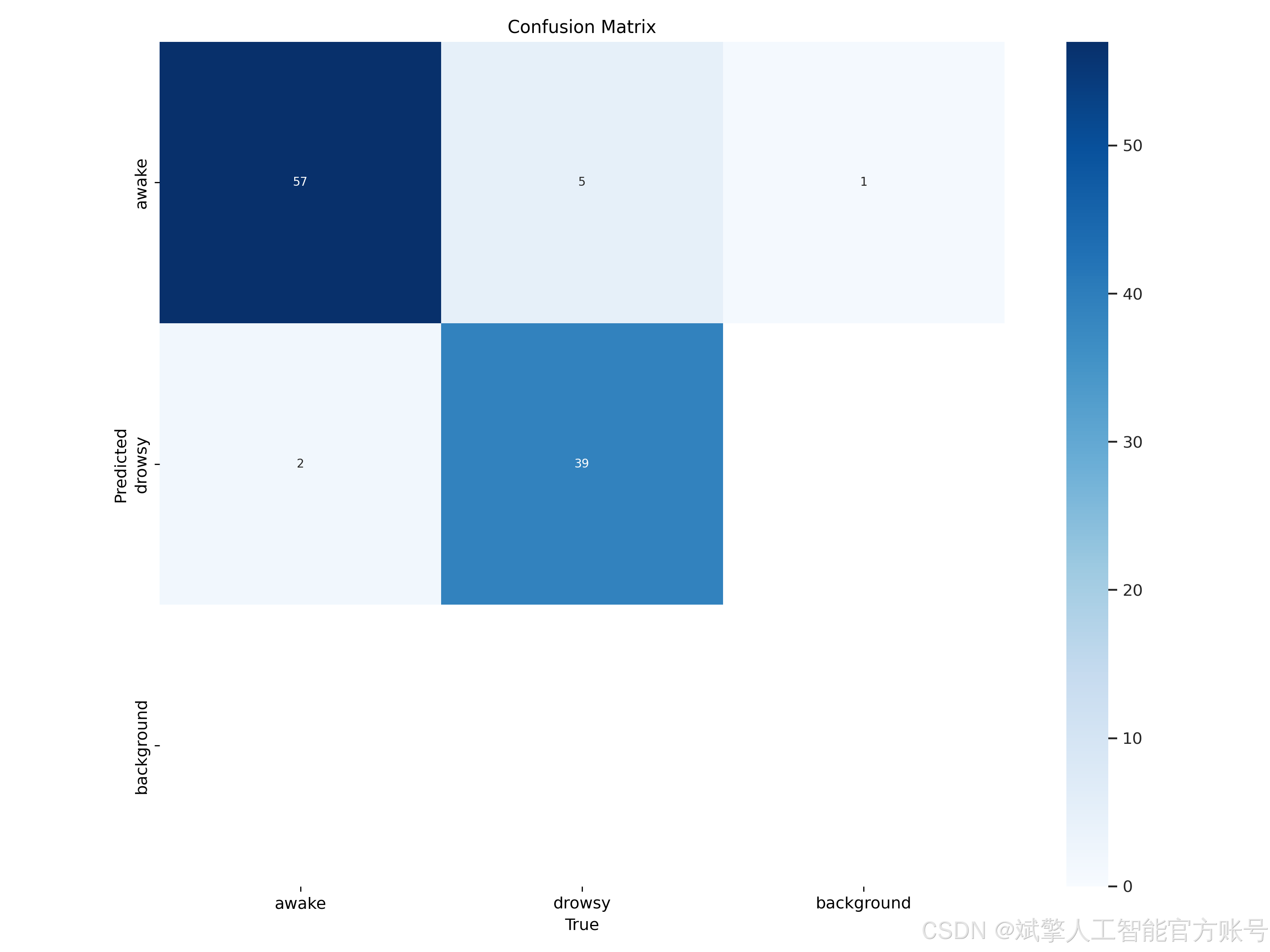
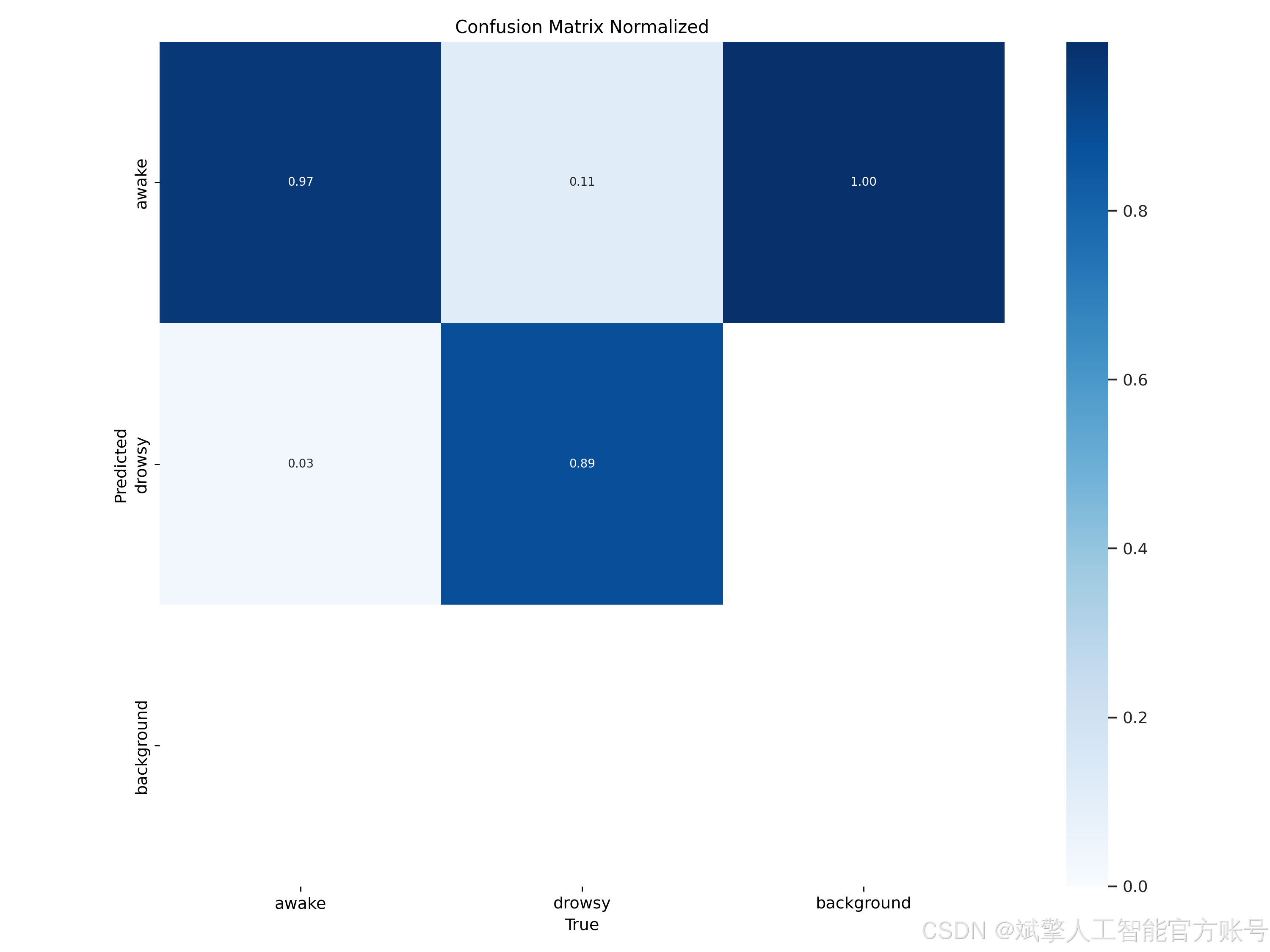
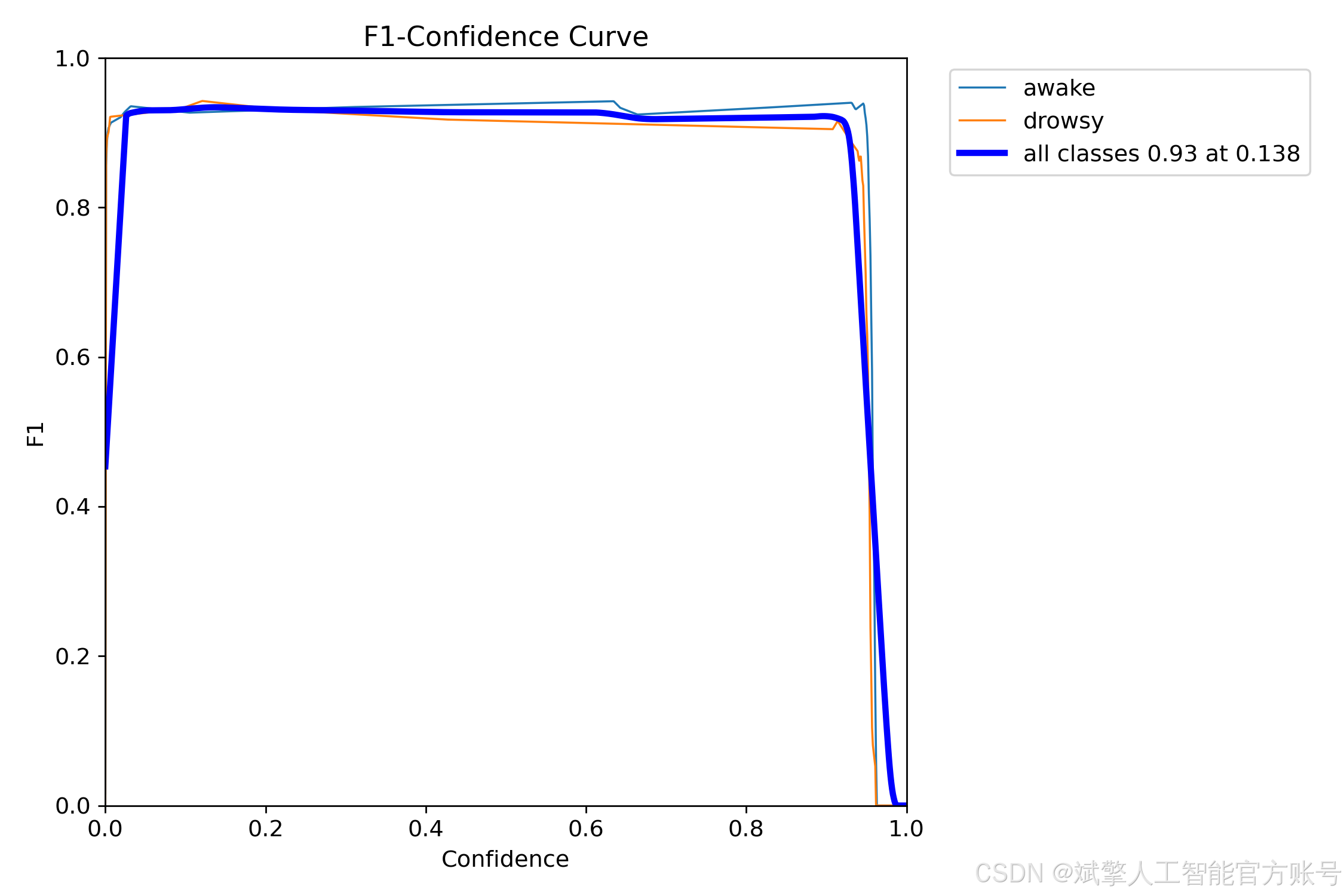
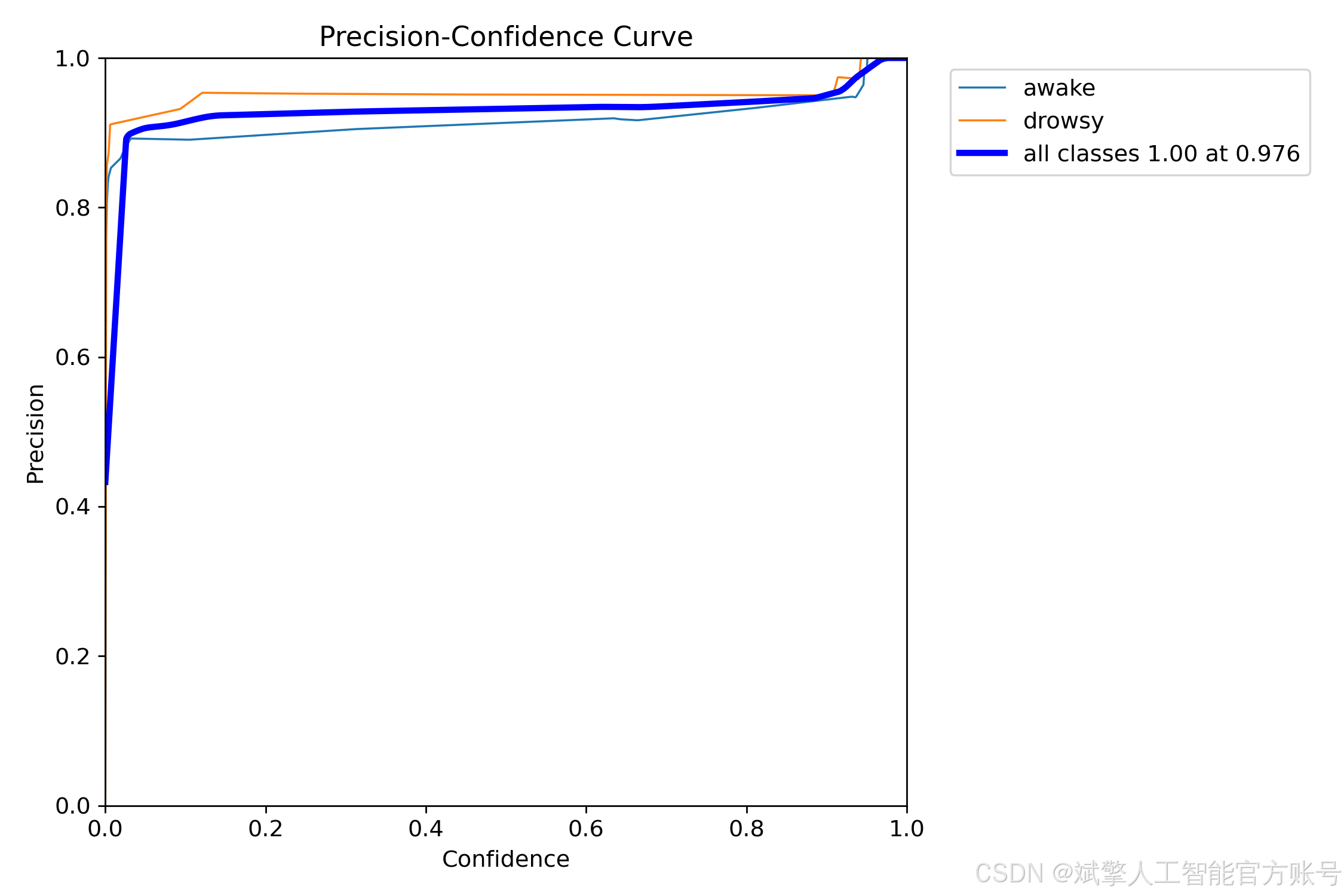
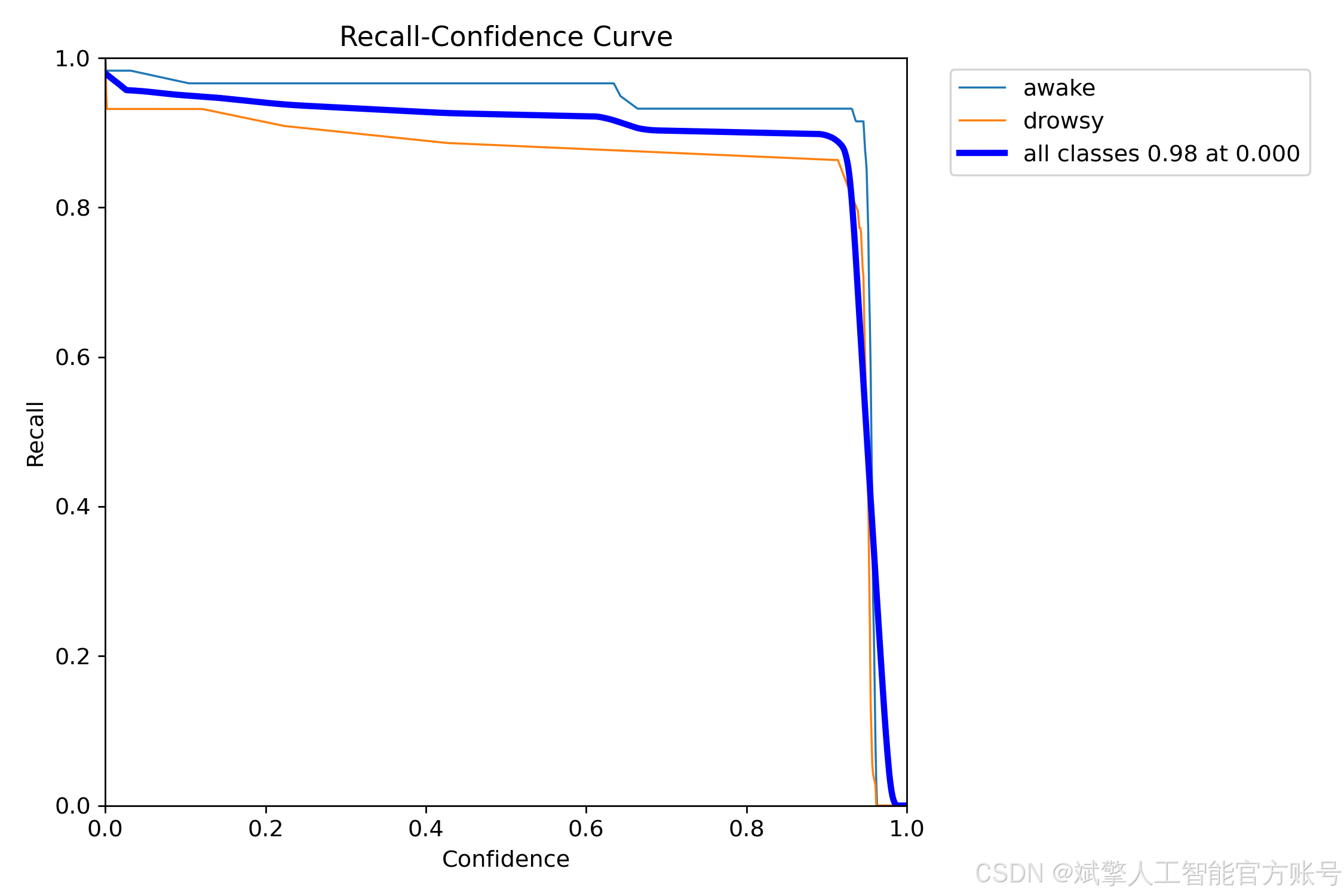
训练结果

六、核心代码
import sys
import cv2
import numpy as np
from PyQt5.QtWidgets import QApplication, QMessageBox, QFileDialog
from PyQt5.QtCore import QThread, pyqtSignal
from ultralytics import YOLOv10
from UiMain import UiMainWindow
import time
import os
class DetectionThread(QThread):
frame_received = pyqtSignal(np.ndarray, np.ndarray, list) # 原始帧, 检测帧, 检测结果
finished_signal = pyqtSignal() # 线程完成信号
def __init__(self, model, source, conf, iou, parent=None):
super().__init__(parent)
self.model = model
self.source = source
self.conf = conf
self.iou = iou
self.running = True
def run(self):
try:
if isinstance(self.source, int) or self.source.endswith(('.mp4', '.avi', '.mov')): # 视频或摄像头
cap = cv2.VideoCapture(self.source)
while self.running and cap.isOpened():
ret, frame = cap.read()
if not ret:
break
# 保存原始帧
original_frame = frame.copy()
# 检测
results = self.model(frame, conf=self.conf, iou=self.iou)
annotated_frame = results[0].plot()
# 提取检测结果
detections = []
for result in results:
for box in result.boxes:
class_id = int(box.cls)
class_name = self.model.names[class_id]
confidence = float(box.conf)
x, y, w, h = box.xywh[0].tolist()
detections.append((class_name, confidence, x, y))
# 发送信号
self.frame_received.emit(
cv2.cvtColor(original_frame, cv2.COLOR_BGR2RGB),
cv2.cvtColor(annotated_frame, cv2.COLOR_BGR2RGB),
detections
)
# 控制帧率
time.sleep(0.03) # 约30fps
cap.release()
else: # 图片
frame = cv2.imread(self.source)
if frame is not None:
original_frame = frame.copy()
results = self.model(frame, conf=self.conf, iou=self.iou)
annotated_frame = results[0].plot()
# 提取检测结果
detections = []
for result in results:
for box in result.boxes:
class_id = int(box.cls)
class_name = self.model.names[class_id]
confidence = float(box.conf)
x, y, w, h = box.xywh[0].tolist()
detections.append((class_name, confidence, x, y))
self.frame_received.emit(
cv2.cvtColor(original_frame, cv2.COLOR_BGR2RGB),
cv2.cvtColor(annotated_frame, cv2.COLOR_BGR2RGB),
detections
)
except Exception as e:
print(f"Detection error: {e}")
finally:
self.finished_signal.emit()
def stop(self):
self.running = False
class MainWindow(UiMainWindow):
def __init__(self):
super().__init__()
# 初始化模型
self.model = None
self.detection_thread = None
self.current_image = None
self.current_result = None
self.video_writer = None
self.is_camera_running = False
self.is_video_running = False
self.last_detection_result = None # 新增:保存最后一次检测结果
# 连接按钮信号
self.image_btn.clicked.connect(self.detect_image)
self.video_btn.clicked.connect(self.detect_video)
self.camera_btn.clicked.connect(self.detect_camera)
self.stop_btn.clicked.connect(self.stop_detection)
self.save_btn.clicked.connect(self.save_result)
# 初始化模型
self.load_model()
def load_model(self):
try:
model_name = self.model_combo.currentText()
self.model = YOLOv10(f"{model_name}.pt") # 自动下载或加载本地模型
self.update_status(f"模型 {model_name} 加载成功")
except Exception as e:
QMessageBox.critical(self, "错误", f"模型加载失败: {str(e)}")
self.update_status("模型加载失败")
def detect_image(self):
if self.detection_thread and self.detection_thread.isRunning():
QMessageBox.warning(self, "警告", "请先停止当前检测任务")
return
file_path, _ = QFileDialog.getOpenFileName(
self, "选择图片", "", "图片文件 (*.jpg *.jpeg *.png *.bmp)")
if file_path:
self.clear_results()
self.current_image = cv2.imread(file_path)
self.current_image = cv2.cvtColor(self.current_image, cv2.COLOR_BGR2RGB)
self.display_image(self.original_image_label, self.current_image)
# 创建检测线程
conf = self.confidence_spinbox.value()
iou = self.iou_spinbox.value()
self.detection_thread = DetectionThread(self.model, file_path, conf, iou)
self.detection_thread.frame_received.connect(self.on_frame_received)
self.detection_thread.finished_signal.connect(self.on_detection_finished)
self.detection_thread.start()
self.update_status(f"正在检测图片: {os.path.basename(file_path)}")
def detect_video(self):
if self.detection_thread and self.detection_thread.isRunning():
QMessageBox.warning(self, "警告", "请先停止当前检测任务")
return
file_path, _ = QFileDialog.getOpenFileName(
self, "选择视频", "", "视频文件 (*.mp4 *.avi *.mov)")
if file_path:
self.clear_results()
self.is_video_running = True
# 初始化视频写入器
cap = cv2.VideoCapture(file_path)
frame_width = int(cap.get(cv2.CAP_PROP_FRAME_WIDTH))
frame_height = int(cap.get(cv2.CAP_PROP_FRAME_HEIGHT))
fps = cap.get(cv2.CAP_PROP_FPS)
cap.release()
# 创建保存路径
save_dir = "results"
os.makedirs(save_dir, exist_ok=True)
timestamp = time.strftime("%Y%m%d_%H%M%S")
save_path = os.path.join(save_dir, f"result_{timestamp}.mp4")
fourcc = cv2.VideoWriter_fourcc(*'mp4v')
self.video_writer = cv2.VideoWriter(save_path, fourcc, fps, (frame_width, frame_height))
# 创建检测线程
conf = self.confidence_spinbox.value()
iou = self.iou_spinbox.value()
self.detection_thread = DetectionThread(self.model, file_path, conf, iou)
self.detection_thread.frame_received.connect(self.on_frame_received)
self.detection_thread.finished_signal.connect(self.on_detection_finished)
self.detection_thread.start()
self.update_status(f"正在检测视频: {os.path.basename(file_path)}")
def detect_camera(self):
if self.detection_thread and self.detection_thread.isRunning():
QMessageBox.warning(self, "警告", "请先停止当前检测任务")
return
self.clear_results()
self.is_camera_running = True
# 创建检测线程 (默认使用摄像头0)
conf = self.confidence_spinbox.value()
iou = self.iou_spinbox.value()
self.detection_thread = DetectionThread(self.model, 0, conf, iou)
self.detection_thread.frame_received.connect(self.on_frame_received)
self.detection_thread.finished_signal.connect(self.on_detection_finished)
self.detection_thread.start()
self.update_status("正在从摄像头检测...")
def stop_detection(self):
if self.detection_thread and self.detection_thread.isRunning():
self.detection_thread.stop()
self.detection_thread.quit()
self.detection_thread.wait()
if self.video_writer:
self.video_writer.release()
self.video_writer = None
self.is_camera_running = False
self.is_video_running = False
self.update_status("检测已停止")
def on_frame_received(self, original_frame, result_frame, detections):
# 更新原始图像和结果图像
self.display_image(self.original_image_label, original_frame)
self.display_image(self.result_image_label, result_frame)
# 保存当前结果帧用于后续保存
self.last_detection_result = result_frame # 新增:保存检测结果
# 更新表格
self.clear_results()
for class_name, confidence, x, y in detections:
self.add_detection_result(class_name, confidence, x, y)
# 保存视频帧
if self.video_writer:
self.video_writer.write(cv2.cvtColor(result_frame, cv2.COLOR_RGB2BGR))
def on_detection_finished(self):
if self.video_writer:
self.video_writer.release()
self.video_writer = None
self.update_status("视频检测完成,结果已保存")
elif self.is_camera_running:
self.update_status("摄像头检测已停止")
else:
self.update_status("图片检测完成")
def save_result(self):
if not hasattr(self, 'last_detection_result') or self.last_detection_result is None:
QMessageBox.warning(self, "警告", "没有可保存的检测结果")
return
save_dir = "results"
os.makedirs(save_dir, exist_ok=True)
timestamp = time.strftime("%Y%m%d_%H%M%S")
if self.is_camera_running or self.is_video_running:
# 保存当前帧为图片
save_path = os.path.join(save_dir, f"snapshot_{timestamp}.jpg")
cv2.imwrite(save_path, cv2.cvtColor(self.last_detection_result, cv2.COLOR_RGB2BGR))
self.update_status(f"截图已保存: {save_path}")
else:
# 保存图片检测结果
save_path = os.path.join(save_dir, f"result_{timestamp}.jpg")
cv2.imwrite(save_path, cv2.cvtColor(self.last_detection_result, cv2.COLOR_RGB2BGR))
self.update_status(f"检测结果已保存: {save_path}")
def closeEvent(self, event):
self.stop_detection()
event.accept()
if __name__ == "__main__":
app = QApplication(sys.argv)
# 设置应用程序样式
app.setStyle("Fusion")
# 创建并显示主窗口
window = MainWindow()
window.show()
sys.exit(app.exec_())七、项目源码(视频下方简介内)

基于深度学习YOLOv10的疲劳驾驶识别检测系统(YOLOv10+YOLO数据集+UI界面+Python项目源码+模型)_哔哩哔哩_bilibili
基于深度学习YOLOv10的疲劳驾驶识别检测系统(YOLOv10+YOLO数据集+UI界面+Python项目源码+模型)

















 912
912

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









