




文章目录
1. 摘要📢
本文主要描述了Zephyr的window开发环境搭建,且如何在FPB-RA6E2开发板上运行Zephyr,并成功点亮LED,其中操作过程、步骤都很详细,非常适合刚接触Zephyr的小伙伴,希望能帮助大家🚩😊👍📢✨💐💐💐💐💐💐
如果你想通过瑞萨“官方”方式“打开”FPB-RA6E2开发板,请移步博主的另一篇瑞萨FPB-RA6E2开发板快速入门,谢谢!
2. Zephyr开发环境搭建
博主是在window平台搭建zephyr开发环境的。
2.1. 准备工作
首先,以管理员身份打开 powershell、输入以下指令安装 zephyr 所需的依赖项:
winget install Kitware.CMake Ninja-build.Ninja oss-winget.gperf python Git.Git oss-winget.dtc wget 7zip.7zip SoftwareFreedomConservancy.QEMU
然后,将需常用到的加入系统环境变量。
最后,重启 powershell,输入以下指令检查是否生效:
dtc --version
Ninja --version
qemu-system-arm --version
7z.exe -version
2.2. 创建 python 虚拟环境
- 进入自己的工作路径,创建虚拟环境
python -m venv zephyrproject\.venv
- 激活虚拟环境。如果要退出虚拟环境:
.venv\Scripts\Activate.ps1
终端截图:

2.3. 安装 West 工具
在虚拟环境中使用 pip 安装 west:
pip install west
完成安装后,执行以下命令验证 west 是否安装成功:
west --version
2.4. 获取 zephyr 源码
west init zephyrproject // 初始化zephyr环境并获取源码
cd zephyrproject // 进入zephyrproject目录
west update // 更新zephyr源码
不出意外的话,更新成功后,目录应该是这样子:

导出 Zephyr Cmake package:
west zephyr-export
- 在你的工作区中为 Zephyr 生成 CMake package 配置文件(使得 find_package (Zephyr) 可用)。
- 生成的文件包含 Zephyr 的路径、需要的 CMake 模块以及构建辅助信息,方便外部 CMake 项目引用 Zephyr。
- 通常在你已经克隆 / 更新了 Zephyr 源码后运行;如果只是用 west build 构建示例通常不需要,但如果要把 Zephyr 当作外部库用在其它 CMake 项目,就需要运行它。
2.5. 安装 python 依赖
pip install -r zephyr\scripts\requirements.txt
2.6. 安装 Zephyr SDK
Zephyr 软件开发工具包 (SDK) 包含 Zephyr 支持的每个架构的工具链,其中包括编译器、汇编器、链接器和构建 Zephyr 应用程序所需的其他程序。
cd .\zephyrproject\zephyr\
west sdk install
至此,zephyr开发环境和源码工程都准备OK了,下面就开始愉快地、迫不及待地点亮FPB-RA6E2开发板啦🎉🪅🌈🏳️🌈
3. 编译FPB-RA6E2 sample
先确认一下,zephyr是否支持了FPB-RA6E2开发板🤔

哇!!!😃🤗😚是支持的喔。
那就输入闪灯sample例程编译命令,等待编译完成吧。
编译命令如下:
west build -p always -b fpb_ra6e2 .\samples\basic\blinky
终端截图:
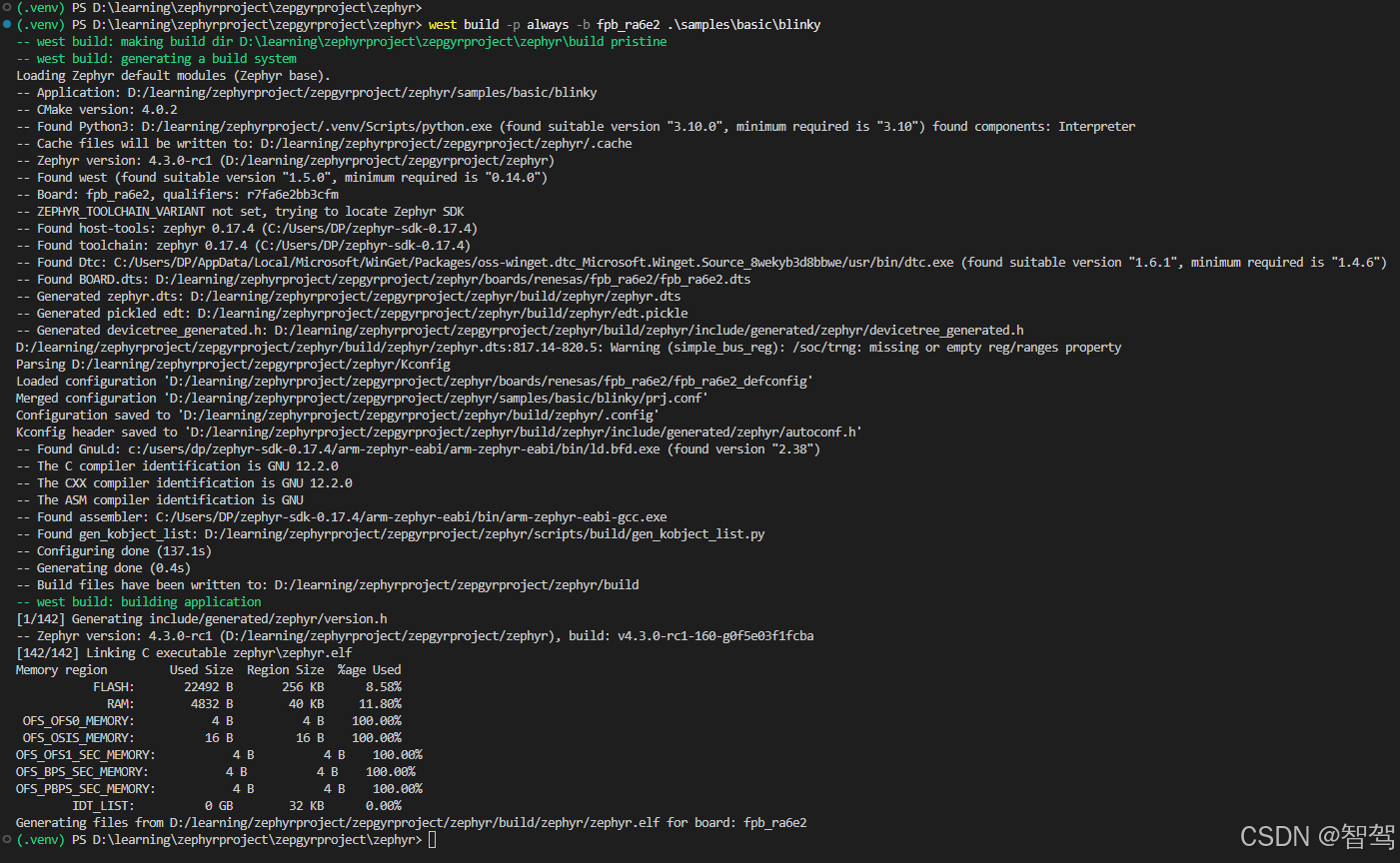
可以看到,编译成功且生成了.elf文件。
4. 点亮FPB-RA6E2开发板
4.1. 程序烧录
输入烧录命令,等待程序烧录完成,观察开发板LED闪烁现象。
烧录命令如下:
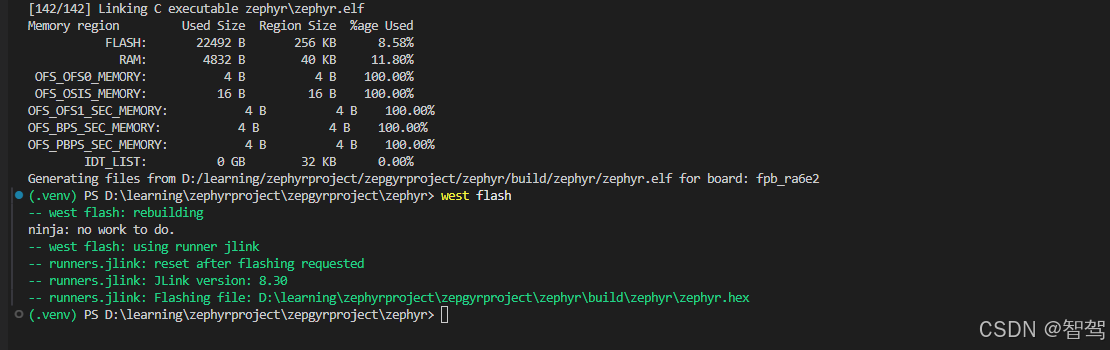
west flash
终端截图:
4.2. 观察结果
开发板LED闪烁效果:
开发板串口输出截图:

4.3. sample 代码分析
blinky main函数路径:zephyr\samples\basic\blinky\src\main.c,分析代码我们可以知道LED的翻转周期是1000ms,且每次翻转都会有串口打印,打印内容与实际串口输出相符。
/*
* Copyright (c) 2016 Intel Corporation
*
* SPDX-License-Identifier: Apache-2.0
*/
#include <stdio.h>
#include <zephyr/kernel.h>
#include <zephyr/drivers/gpio.h>
/* 1000 msec = 1 sec */
#define SLEEP_TIME_MS 1000
/* The devicetree node identifier for the "led0" alias. */
#define LED0_NODE DT_ALIAS(led0)
/*
* A build error on this line means your board is unsupported.
* See the sample documentation for information on how to fix this.
*/
static const struct gpio_dt_spec led = GPIO_DT_SPEC_GET(LED0_NODE, gpios);
int main(void)
{
int ret;
bool led_state = true;
if (!gpio_is_ready_dt(&led)) {
return 0;
}
ret = gpio_pin_configure_dt(&led, GPIO_OUTPUT_ACTIVE);
if (ret < 0) {
return 0;
}
while (1) {
ret = gpio_pin_toggle_dt(&led);
if (ret < 0) {
return 0;
}
led_state = !led_state;
printf("LED state: %s\n", led_state ? "ON" : "OFF");
k_msleep(SLEEP_TIME_MS);
}
return 0;
}



















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











